想象一下,一个机器人正在陆地上爬行探索,遇到水域后直接下水,然后切换成游泳模式继续前进——这不是科幻场景,而是上海交通大学研究团队最新研发的多模态两栖软体机器人的真实写照。该文以“A Multimodal Amphibious Robot Driven by Soft Electrohydraulic Flippers”为题,在Science合作期刊/中国科技期刊卓越行动计划二期英文梯队期刊Cyborg and Bionic Systems上进行发表。

原文链接:https://spj.science.org/doi/abs/10.34133/cbsystems.0253
这款机器人最大的亮点在于,它能够在陆地和水中环境之间自如切换,无需进行任何结构改造或重新配置。更令人惊叹的是,它在2.1°C的低温水域到61.3°C的高温环境中都能保持运动能力,正常工作。
软体电液驱动:两栖运动的核心秘密
这款机器人的核心技术是软电液执行器(Soft Electrohydraulic Actuator)。不同于传统的刚性机器人,软体机器人具有更好的环境适应性和安全性。而电液驱动技术则是近年来软体机器人领域的一个重要突破方向。
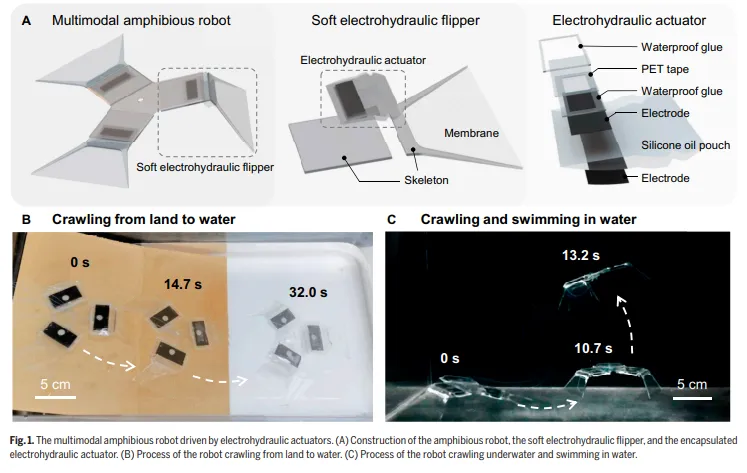
机器人的主体由三个呈120度对称分布的软电液鳍状肢组成。每个鳍状肢内部都包含一个充满硅油的密封袋,两侧覆盖有碳电极。当施加高压电信号时,正负电极相互吸引,挤压内部的硅油,使执行器产生弯曲动作。这种设计巧妙地将电能转化为液压能,再转化为机械运动。
研究团队设计了一种特别的油囊结构,在30毫米×40毫米的矩形基础上增加了弧形突起。这种非对称设计使得执行器在通电时能够产生更加充分的膨胀。同时,通过在执行器一侧添加骨架结构,限制了油囊的膨胀方向,将膨胀转变为了稳定且可控的弯曲运动。
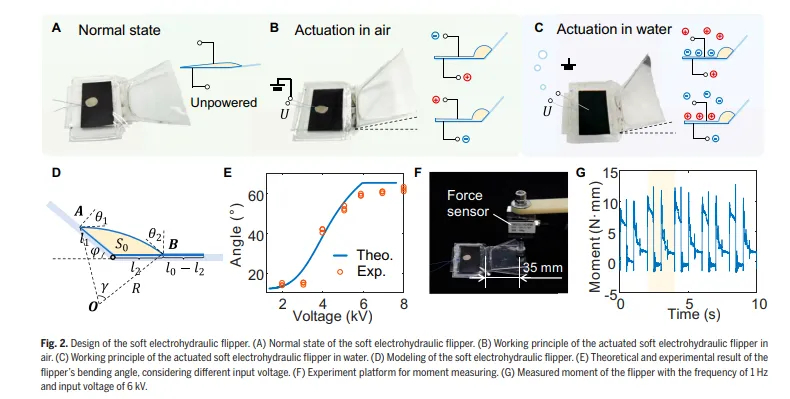
更有趣的是,这种电液执行器在陆地和水中的工作原理并不相同。在陆地上,执行器两侧的电极分别连接电源的正负极;而在水中,只需要将防水密封一侧的电极连接电源,另一侧直接暴露在水中,利用水作为导电介质形成回路。这种设计使得机器人能够快速适应不同的环境介质。
三种运动模式:爬行与游泳的协同设计
基于三个对称分布的软电液鳍状肢,这款机器人实现了三种不同的运动模式:陆地爬行、水下爬行和水中游泳。
在陆地爬行模式下,机器人通过单个鳍状肢的周期性弯曲和恢复来产生前进动力。当鳍状肢弯曲时,前端尖锐的骨架设计能够牢牢抓住地面,产生较大的摩擦力;而后端的接触面积较小,摩擦力相对较弱。这种前后摩擦力的不平衡使得机器人能够向前爬行。实验表明,在6赫兹的最优驱动频率下,机器人的陆地爬行速度可达2.9厘米/秒。

水下爬行模式则利用了完全不同的推进原理。由于水的浮力作用,机器人与水底的摩擦力大幅减小,此时主要依靠鳍状肢与水的相互作用力来产生推进。当两个后部鳍状肢同时向下弯曲时,水对鳍状肢产生向上的反作用力,使机器人后部抬起;当鳍状肢恢复时,向后摆动产生向前的推力,推动机器人前进。在1.6赫兹的驱动频率下,水下爬行速度可达3.2厘米/秒。

最令人印象深刻的是游泳模式。当三个鳍状肢同时工作时,机器人能够产生对称的向上推力,实现垂直上浮。研究团队通过流体仿真发现,鳍状肢的摆动会在机器人下方产生涡环,这些涡环的脱落和相互作用进一步增强了推进效率。通过优化初始角度和驱动频率,机器人的游泳速度最高可达5.9厘米/秒,相对于自身高度可达0.99倍体长/秒的速度。
极限环境适应:从冰水到热水的全天候工作
环境适应性是评价探索型机器人的重要指标。研究团队对这款两栖机器人进行了极端温度测试,结果令人惊喜。
在61.3°C的高温水中,机器人的运动性能与常温下基本相当,这得益于硅油良好的热稳定性和电极材料的耐高温特性。而在2.1°C的冰水中,虽然硅油粘度增加导致执行器响应速度有所下降,但机器人仍能保持2.7厘米/秒的游泳速度,展现出优秀的低温适应能力。
这种宽温度范围的工作能力使得机器人能够适应各种复杂的自然环境,这对于实际的环境探索和监测应用具有重要意义。
研究团队还特别优化了执行器的防水设计,采用多层防水工艺:首先在电极周围涂覆防水软胶,然后覆盖60微米厚的PET胶带,最后再涂覆一层防水软胶填充缝隙,并用紫外光固化。这种三层防水结构确保了执行器在水中的长期稳定工作。
理论建模与性能优化:科学原理与工程实践的融合
为了深入理解电液执行器的工作机理并优化其性能,研究团队建立了力-电-液耦合理论模型。该模型考虑了电场力、液压和薄膜张力之间的相互作用,能够准确预测执行器在不同电压下的弯曲角度。
理论分析表明,执行器存在一个约3千伏的启动电压阈值。低于这个电压时,电极间的吸引力不足以克服薄膜的弹性阻力,执行器几乎不产生弯曲。当电压超过3千伏后,弯曲角度随电压呈指数增长。在6千伏时,电极完全吸合,所有硅油被挤压到无电极覆盖区域,执行器达到最大弯曲角度约65度。
研究团队还发现了一个有趣的现象:由于PET薄膜在高压下会产生极化效应,执行器在断电后不能快速恢复原状。为解决这个问题,他们设计了一种交替正负电压的驱动方案,通过H桥电路实现正-零-负-零的信号序列,有效消除了薄膜的极化累积,使执行器能够实现高频稳定工作。
力矩测试显示,单个执行器的最大输出力矩超过10毫牛·米,足以支撑整个机器人的重量和运动需求。更重要的是,经过约500个工作周期的耐久性测试,执行器的输出性能几乎没有衰减,证明了其良好的可靠性。
展望未来,这种多模态两栖软体机器人在环境监测、搜索救援、管道检查等领域具有广阔的应用前景。其无需结构重组即可适应不同环境的特性,使其特别适合在复杂多变的自然环境中执行任务。研究团队未来将继续优化材料和制造工艺,进一步提升机器人的性能和实用性,使其成为真正实用的环境探索工具。
期刊简介
联系我们
期刊官网:
https://spj.science.org/journal/cbsystems
投稿地址:
https://www.editorialmanager.com/cbsystems/default2.aspx
想了解更多文章细节,或咨询投稿事宜,欢迎您联系Cyborg and Bionic Systems(CBSystems)编辑部:
Email: editorialoffice@cbsystems.org.cn
Tel: 010-68914772
我们会及时与您取得联系,谢谢!
编辑:刘新
审核:李炳泉