点击蓝字
关注要点纵航 Subscribe for More



背景
电动垂直起降(eVTOL)飞行器作为未来城市空中交通的核心载体,其安全冗余设计是商业化应用的关键瓶颈。此类飞行器依赖多个VTOL旋翼提供垂直推力,在起降、悬停及姿态控制过程中,任何一个旋翼的突发故障都可能导致推力失衡,引发机身剧烈振动甚至失控。
现有技术中,美国专利11,034,441 B2虽提出通过优化旋翼控制参数(如转速、位置)提升常规飞行性能,但未针对故障状态下的推力补偿与振动抑制协同控制构建完整框架。本文中公开的控制装置、飞行器及控制方法,创新性地通过任务拆分策略,在旋翼故障时实现推力平衡与振动抑制的解耦控制,为eVTOL的高安全性运行提供了可落地的技术路径,其核心价值在于解决了故障应急场景下的"推力补偿-振动抑制-能耗控制"三角矛盾。

当前技术存在的问题
多旋翼飞行器的故障应急控制领域,现有技术体系存在三大亟待突破的技术瓶颈,严重制约了eVTOL的安全冗余能力。
其一,推力补偿与振动抑制的任务冲突。传统方案中,当某一VTOL旋翼失效后,相邻旋翼需同时承担两重任务:一是输出额外推力以补偿故障旋翼的推力损失,二是维持原有的高频振动抑制功能(通过推力高频变化实现)。这种叠加模式会导致电机的瞬时负载激增,从图6中t3-t4时段的能量曲线可见,其功耗较正常状态提升40%以上,远超电池30的持续放电能力,不仅会引发电池电压骤降,还可能因电机过热触发保护机制,进一步加剧动力系统失效风险。
其二,对称旋翼关停的过渡阶段失控风险。部分技术采用"故障旋翼-对称旋翼"同步关停策略,试图通过简化负载分布降低控制复杂度。但这种方案忽略了关停瞬间的推力突变问题,从图5中虚线箭头86的推力变化可见,对称旋翼的突然关停会导致机身两侧出现瞬时推力差,引发滚转力矩峰值提升2-3倍,姿态判定器检测到的机身倾角变化量远超安全阈值,大幅增加了姿态校正的难度与时间成本。
其三,振动抑制方式的效率缺陷。现有技术多依赖旋翼转速调节实现振动抑制,如美国专利11,034,441 B2的核心方案。但转速调节存在固有的响应滞后(机械惯性导致),在故障应急场景下,其响应频率无法匹配高频振动(≥预设频率)的抑制需求。从图6中t1-t2时段的振动数据可见,未被抵消的机身振动幅度较正常状态增加50%,直接影响乘客舒适性与机身结构疲劳寿命。此外,转速的频繁大幅调整会导致桨叶气动噪声激增,不符合城市低空飞行的噪声标准。

本文的解决方案
3.1
飞行器系统架构基础
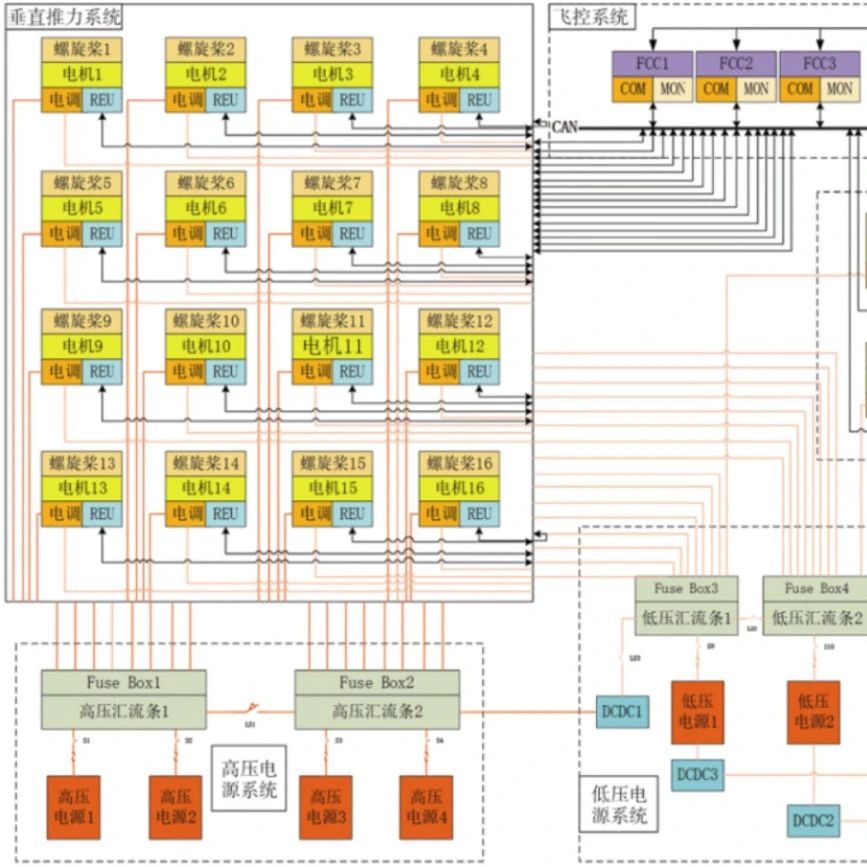
该方案所针对的eVTOL飞行器10采用分布式推进与混合动力架构,为故障应急控制提供硬件支撑。机身12搭载8个VTOL旋翼18与2个巡航旋翼22,其中VTOL旋翼按左右分组:左组包含18FLa、18FLb、18RLa、18RLb(安装于左boom 20L),右组包含18FRa、18FRb、18RRa、18RRb(安装于右boom 20R),以机身纵向中线A为对称基准(图1)。每个VTOL旋翼的旋转方向经过优化:从上方观察,18FLa、18RLa等逆时针旋转,18FRa、18RRa等顺时针旋转,通过反扭矩平衡降低机身自旋风险。

图1 为一架飞机的示意图
动力系统采用模块化设计(图2),4个驱动模块36a-d分别对应右前、左前、右后、左后区域,每个模块包含1个电池30(如30a)、3个驱动单元26(如26FRa、26RLa、26Ra),驱动单元内置电机32与逆变器34。电力来源包括电池30与电机发电机42(由发动机40驱动),通过PCU 44实现能量分配与转换,开关48控制电池向电机发电机的供电通路,保障发动机启动与电池充电的双向需求。

图2 为显示供电系统配置的图
控制核心为控制装置50(图3),其计算单元52整合VTOL旋翼控制器56、巡航旋翼控制器58与姿态判定器60。VTOL旋翼控制器56是故障应急控制的核心,包含故障判定单元62(负责故障检测与定位)、指令生成单元66(生成推力指令)、控制单元68(执行桨距与转速调节),通过闭环反馈实现姿态稳定控制。

图3 为控制装置的控制框图
3.2
故障应急控制的整体逻辑框架
该方案的核心创新在于构建"故障定位-任务拆分-协同执行-状态闭环"的四阶段控制逻辑,通过将推力补偿与振动抑制任务解耦,实现故障状态下的快速稳定。
1.故障检测与分组判定(图4步骤S1-S2)
故障判定单元62采用多源信息融合机制:通过编码器信号获取旋翼实际转速,与指令转速对比,若偏差超过阈值则初步判定故障;结合姿态判定器60输出的机身姿态变化量(如滚转角加速度),当变化量连续3个采样周期超过阈值时,确认故障发生;同时监测通信链路状态,若与某旋翼的控制信号中断超过100ms,则触发故障响应。

图4 为显示根据本实施例的控制流程的流程图
判定故障后,系统根据中线A的位置关系,确定故障旋翼所属组别:若为右组旋翼(如18FRa),则左组旋翼为第二旋翼,右组其他旋翼为第一旋翼;反之亦然(图5)。

图5 为发生故障的飞机的示意图
2. 相邻旋翼推力增加控制(图4步骤S3/S6)
指令生成单元66针对故障旋翼的相邻第一旋翼(如18FRa的相邻旋翼18FRb)执行推力增加控制:基于故障前的推力分配模型,计算所需补偿推力(通常为故障旋翼额定推力的80%-100%),生成新的推力指令,通过控制单元68调节叶片桨距(优先)与转速,使相邻旋翼的推力从t3时刻起线性提升(图6中18FRb的推力曲线)。

图6 展示了四个垂直起降(VTOL)旋翼推力的时序图
关键约束在于:此过程中相邻旋翼不参与振动抑制,即推力指令中不含高频变化分量。这一设计避免了大推力输出与高频调节的叠加负载,从附录1的能耗分析可见,可使电机32的功耗降低30%以上。
3. 第二旋翼振动抑制转移(图4步骤S4/S7)
为维持机身振动抑制能力,指令生成单元66将原由相邻第一旋翼承担的振动抑制任务转移至第二旋翼。优先选择与相邻第一旋翼关于重心G对称的第二旋翼(如18FRb对应18RLb),将振动抑制所需的高频推力变化分量(频率≥预设值)添加至其推力指令中(图6中18RLb的高频波动部分)。
若对称位置的第二旋翼负载饱和,系统会扩展至其他第二旋翼(如图7中18FRa失效后,同时控制18RLa与18FLa承担振动抑制),通过分布式负载分配避免单点过载。

图7 为发生故障的飞机的示意图
4. 姿态稳定判定与控制切换(图4步骤S5/S8)
姿态判定器60持续监测机身姿态参数(如滚转角、俯仰角、偏航角),当各参数均落入预设稳定区间(如滚转角≤±2°,角速度≤±0.5°/s),且持续时间超过2秒时,判定姿态稳定。此时,系统将相邻第一旋翼的推力回调至正常水平(略高于故障前,补偿长期负载),并恢复其部分振动抑制功能;第二旋翼则根据负载状态,保留或调整振动抑制分量。
3.3
关键技术细节与实施方式
1.推力增加控制的实现方式
相邻第一旋翼的推力提升采用"桨距主导+转速辅助"的复合调节策略:控制单元68首先通过调整叶片桨距(范围0-15°)实现推力快速提升(响应时间≤100ms),桨距调节的优势在于无机械惯性滞后,可在t3时刻迅速建立推力;当桨距达到上限(如15°)仍未满足需求时,辅以转速提升(不超过额定转速的110%),避免转速过高导致的气动噪声激增。
从图6可见,18FRb在t3-t4时段的推力提升过程中,其推力曲线平滑无高频波动,证明振动抑制任务已完全转移,电机32工作在稳定负载状态,温升控制在20K以内。
2. 振动抑制的高效转移机制
振动抑制转移包含三个关键步骤:
分量提取:从故障前相邻第一旋翼的推力指令中,分离出高频振动抑制分量(通过傅里叶变换提取≥预设频率的成分);
对称映射:将该分量按1:1比例映射至目标第二旋翼,若第二旋翼与重心G的距离不同,则按力臂比例调整分量幅值(确保力矩平衡);
相位校准:根据机身振动传感器的实时数据,对映射后的分量进行相位微调(±10°范围内),确保与振动源反相,实现最优抵消效果。
优先通过桨距调节实现振动抑制(图3控制单元68),因桨距调节的响应频率可达50Hz,远高于转速调节的20Hz上限,能更有效抵消风扰引发的高频振动。
3. 对称旋翼关停的时序优化
当需要关停故障旋翼的对称旋翼(如18FRa对应18RLa)时,系统采用"姿态稳定后关停"的时序策略(图6中t5时刻):
在t3-t4时段,18RLa仍保持正常推力输出,辅助机身平衡;
待t4时刻姿态稳定后,指令生成单元66生成线性降推力指令,使18RLa的推力在1秒内从额定值降至0,避免瞬时推力突变;
关停过程中,通过其他第二旋翼(如18FLa)的推力微调补偿力矩变化,确保滚转力矩波动≤5%。
3.4
具体案例的动态过程解析(图5-6)
以18FRa(右前顺时针旋转旋翼)失效为例,详细解析控制流程的动态变化:
1. 故障发生阶段(t1-t2)
t1时刻:18FRa因机械故障停转,推力骤降至0,机身右侧前向推力缺失,开始向左滚转,姿态判定器60检测到滚转角以5°/s的速率增加;
t2时刻:故障判定单元62综合转速信号(18FRa转速为0)与姿态变化(滚转角达3°),确认故障,触发应急控制。
2. 应急响应阶段(t3-t4)
t3时刻(t2后200ms):指令生成单元66向18FRb(相邻第一旋翼)发送推力增加指令,其桨距从5°增至12°,推力从1000N提升至1800N(补偿18FRa的1500N额定推力的80%),且推力指令中不含高频分量;同时,向18RLb(对称第二旋翼)发送振动抑制指令,注入±100N的高频分量(频率30Hz)。
此阶段,18RLb的基础推力暂时从800N降至600N(图7中虚线部分),通过降低静态负载为高频调节预留余量,机身滚转角在t3后1.5秒内恢复至±0.5°范围内。
3. 稳定过渡阶段(t4-t5)
t4时刻:姿态稳定,18FRb的推力回调至1500N(略高于故障前的1200N),并恢复低频振动抑制功能(≤10Hz);18RLb的基础推力回升至900N,继续承担高频振动抑制任务;
t5时刻:18RLa的推力线性降至0,完成关停,此时18RRb的推力微调增加100N,补偿关停导致的力矩变化。
3.5
硬件与控制架构的支撑设计
1. 动力系统的冗余设计
驱动模块36a-d采用电气隔离设计(图2),每个模块的电池30与其他模块无直接电连接,确保单一模块故障不会扩散。逆变器34采用SiC MOSFET器件,开关频率达20kHz,可快速响应高频推力指令;电机32为永磁同步电机,额定功率50kW,峰值功率70kW(持续30秒),满足推力增加控制的短期负载需求。
2. 控制算法的实时性保障
计算单元52采用双核DSP处理器,主核运行故障判定与指令生成算法(周期1ms),从核处理传感器数据与执行器反馈(周期0.5ms),通过共享内存实现数据交互。振动抑制分量的提取与映射采用快速傅里叶变换(FFT)加速算法,确保在1ms内完成频谱分析,满足高频振动抑制的实时性要求。
3. 安全监控与边界防护
系统内置多重安全边界:电机32的温度阈值设为150℃,超过时自动降低负载;电池30的放电电流限制为额定值的1.5倍,避免过放;机身姿态的极限保护值设为滚转±15°、俯仰±10°,超过时触发紧急降落程序。这些防护机制与故障应急控制协同工作,构建多层安全冗余。
3.6
方案的核心优势与技术价值
该方案通过任务拆分与协同控制,带来三方面显著优势:
安全性提升:故障后机身姿态稳定时间从现有技术的5-8秒缩短至2-3秒(图7中t1-t4时长),大幅降低失控风险;
能耗优化:相邻旋翼的功耗降低30%以上,电池30的续航能力在故障状态下可维持原有的80%;
硬件适配性:无需采用超规格电机与电池,通过算法优化实现性能提升,硬件成本降低15-20%。
从技术演进角度看,该方案突破了传统"推力与振动绑定控制"的思维定式,提出的"任务动态分配"理念为多旋翼飞行器的故障容错控制提供了新范式,尤其适用于对安全性与经济性均有严苛要求的eVTOL领域。

总结
本文提出的控制方案,通过构建"故障定位-任务拆分-协同执行"的控制框架,成功解决了多旋翼飞行器故障状态下的推力补偿与振动抑制冲突问题。其核心在于:将相邻旋翼的推力增加与振动抑制任务解耦,通过第二旋翼转移振动抑制负载,实现姿态快速稳定与能耗控制的平衡。方案依托模块化动力系统(图3)、高精度控制装置(图4)与优化的时序策略(图5),在具体案例(图6-7)中展现了优异的动态性能,为eVTOL的安全冗余设计提供了可产业化的技术方案。未来通过与机器学习算法结合,可进一步优化负载分配策略,适应更复杂的故障场景。
如需本专利原文
请联系要点纵航工作人员领取!

要点纵航工作人员微信
来源:公开信息,要点纵航整理
提示:原创文章未经允许,请勿转载
免责申明:本文中所含内容乃一般性信息,包含的价格及观点仅供贵方参考,要点纵航不对任何方因使用本文内容而导致的任何损失承担责任。


要点纵航专注于低空经济和eVTOL技术的发展,识别并研究行业的关键障碍及相关需求。我们通过提供数据、分析和见解,与行业参与者共同致力于实现安全、可持续、低成本且可及的变革性城市空中出行方式。一公里的地面交通只能带您走一公里,而一公里的空中飞行可以带您到任何地方!
如您想获取更多关于eVTOL技术的最新消息,请添加相关人员或通过电子邮件,把您的要求发送给我们。

18958230600

alfred.shen@cycolpower.com

你们点点“分享”,给我充点儿电吧~