结直肠癌手术迎来新突破。澳大利亚新南威尔士大学(UNSW)的研究团队以“Development of a Bioinspired Soft Robotic System for Teleoperated Endoscopic Surgery”为题,在中国科技期刊卓越行动计划二期英文梯队期刊Cyborg and Bionic Systems上发表文章,开发出一套全新的软体机器人手术系统。这套系统最大的亮点是:完全不需要电机驱动,仅靠液压传动就能实现精准的内窥镜手术操作。更有趣的是,研究人员从水蛭身上获得灵感,设计出独特的三爪抓持器,能够像水蛭吸盘一样牢牢抓住组织。在离体猪肠实验中,该系统成功完成了病变组织的抓取、提升和电切除全过程,展现出在狭窄肠道空间内进行精准手术的潜力。

原文链接:https://spj.science.org/doi/abs/10.34133/cbsystems.0289
▍为什么要做软体手术机器人?
结直肠癌是全球第三大常见癌症,死亡率居高不下。内窥镜黏膜下剥离术(ESD)作为早期结直肠癌的重要治疗手段,能够通过人体自然腔道进行手术,避免了传统腹腔镜手术的体表切口。
然而,现有的ESD机器人系统面临诸多挑战。
首先是机械结构的局限性。目前主流的手术机器人,如达芬奇系统的EndoWrist,以及STRAS、micro-IGES等平台,都采用钢缆驱动机制。这种设计在狭窄弯曲的肠道内操作时,会产生严重的摩擦力损失和控制滞后。研究数据显示,当手术器械需要在降结肠等狭窄区域进行大角度弯曲时,钢缆系统的力传递误差会显著增加,严重影响手术精度。
其次是系统的复杂性和成本问题。传统系统依赖微控制器、直流电机和泵等复杂组件,不仅使设备体积庞大、价格昂贵,还增加了操作难度,限制了其在日常临床中的应用。
第三是抓持器设计的不足。现有系统多采用双爪抓持器,在抓取圆形或不规则组织时需要频繁调整旋转角度,增加了医源性损伤的风险。而且双爪设计在力分布上不够均匀,容易造成组织滑脱或损伤。
正是基于这些痛点,UNSW团队决定另辟蹊径,开发一套全新的软体机器人解决方案。他们的目标是创造一个既能在狭窄空间灵活操作,又能提供足够抓取力,同时还要简化系统复杂度的手术工具。
▍向水蛭学习的仿生设计
研究团队的创新之处在于,他们从自然界寻找灵感——水蛭的口器结构。
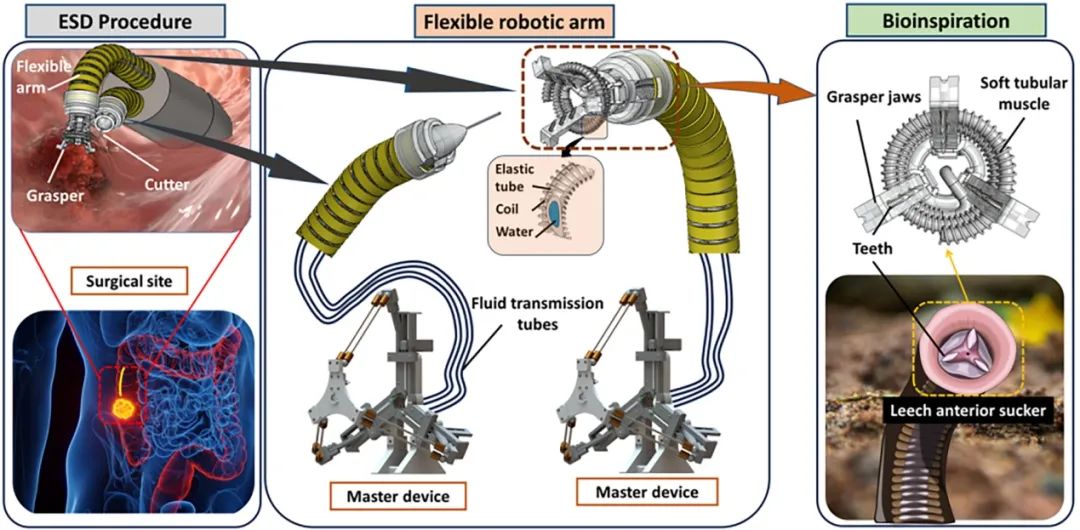
水蛭的前吸盘由三个呈Y形排列的颌组成,每个颌之间相隔120度。每个颌上都有许多小而锋利的齿,能够协同工作,在宿主皮肤上创建精确、无痛的切口。这种独特的生物学结构为手术器械设计提供了绝佳的参考。
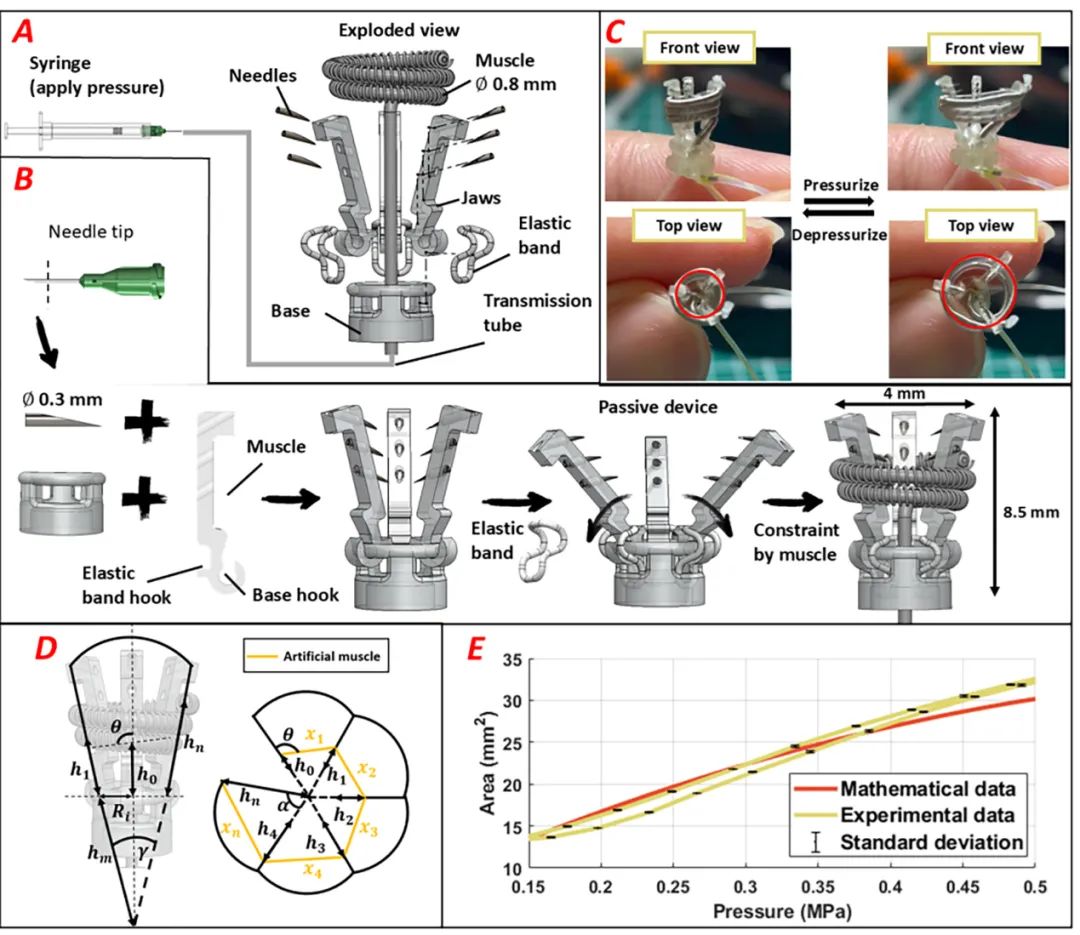
基于这一生物学原理,研究人员设计了三爪抓持器。三个爪子呈120度均匀分布在圆形结构上,完美模仿了水蛭前吸盘的布局。更巧妙的是,齿被设计成向内倾斜并隐藏在爪内,防止在手术过程中损伤周围组织。为了驱动这个仿生结构,团队使用了螺旋缠绕在三爪周围的软管液压人工肌肉,精确模拟水蛭颌部的伸缩运动。
这种设计带来了显著的优势。首先是自动对中功能,三爪同时向中心移动,能够自动将组织引导到抓持器中心,完全无需旋转调整。其次是均匀的力分布,相比双爪机构,三爪设计能更好地贴合圆形病变轮廓,均匀分配载荷,大大降低了组织损伤的风险。
抓持器的尺寸也经过精心优化,直径仅4毫米,长度8.5毫米,这种紧凑的设计使其能在狭窄的肠道空间内灵活操作。实验数据显示,该抓持器的开口面积可从初始的12.5平方毫米扩展到31.2平方毫米(在0.5MPa压力下),扩展系数达到惊人的2.5倍,为抓取不同大小的病变组织提供了充足的适应性。
研究团队还建立了精确的数学模型来描述抓持器的运动特性。通过分析肌肉长度与开口面积的关系,他们推导出了压力与位移之间的二次方程关系,回归分析的R²值达到0.998,证明了模型的高度准确性。这种理论与实验的完美结合,为系统的精准控制奠定了坚实基础。
▍纯机械的主从控制系统
除了仿生抓持器,这套系统的另一个亮点是完全不依赖电子控制的主从操作机制。
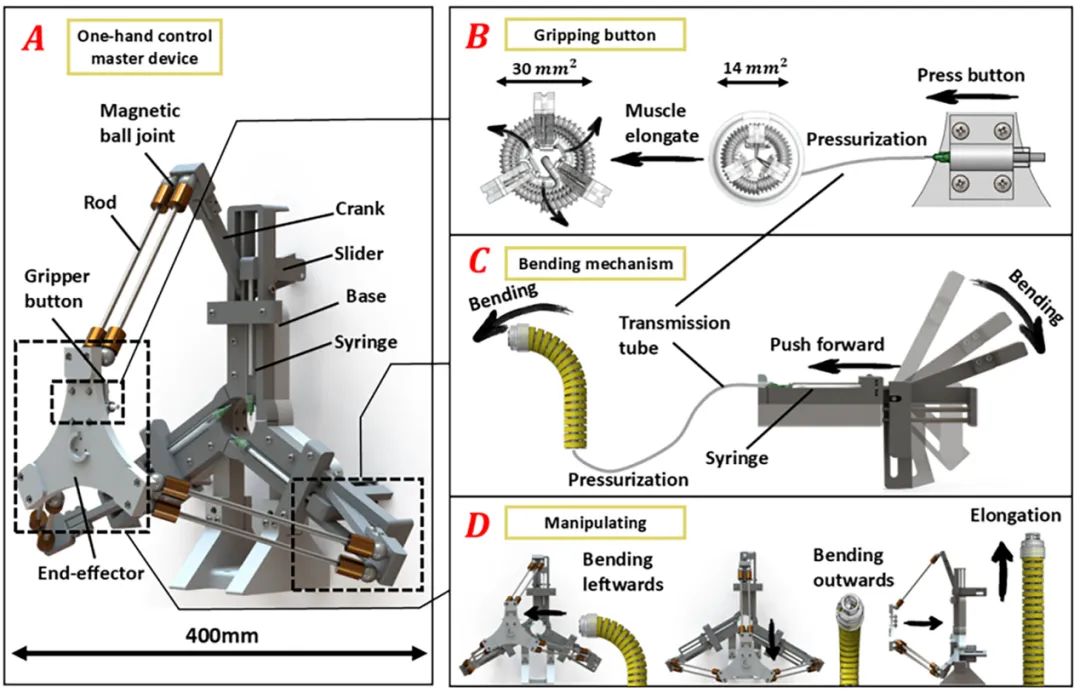
研究团队开发了一个基于Delta结构的主控制器,通过纯机械方式实现精准控制。这个设计的核心是三个注射器作为液压源,通过精心设计的机械结构,将操作者的手部动作转化为远端手术器械的精确运动。
主控制器采用磁性球形关节,配合平行四边形铰接结构,实现了末端执行器的灵活平移运动。为了提供操作所需的压力,团队在主控制器底座集成了三个苏格兰轭机构。每个滑块都连接到一个注射器,通过推动活塞产生压力。这种机构设计提供了较长的力臂和较小的力角,实现了1.45的力放大比,显著减少了操作者的用力负担。
工作原理十分巧妙:当操作者移动主控制器的末端执行器时,运动会同时驱动所有苏格兰轭机构的曲柄,这些机械运动转换为注射器活塞的推拉动作,产生的液压通过1600毫米长的传输管传递到远端,最终驱动软体机械臂和抓持器完成相应的手术动作。
这种纯机械设计的优势是显而易见的。首先,它完全不需要任何电机或电子控制器,大大简化了系统结构,提高了可靠性。其次,液压传动的能量损失几乎可以忽略不计,即使在高弯曲角度下仍能保持稳定的力传递和精确控制。这解决了传统钢缆驱动系统在复杂路径下的摩擦损失问题。
软体机械臂的设计同样精妙。三个液压人工肌肉呈120度分布,形成了一个全向操纵器。这种配置提供了三个自由度:两个用于弯曲运动,一个用于轴向平移。35毫米的长度设计使其能够有效覆盖直径约40毫米的结肠内各个位置。
性能测试展现了系统的卓越能力。在工作空间方面,机械臂可以伸长70毫米,实现100%的伸长率,并能完成40毫米直径的旋转轨迹。收缩力测试显示,系统能产生最大3.88牛顿的力(在0.52 MPa压降下),这远超过ESD手术所需的2.26牛顿阈值。轨迹跟踪实验中,系统的平均跟踪误差仅为0.2毫米,展现了亚毫米级的精度。响应时间测试表明,从主控端施力到从动端检测到力的平均延迟仅为0.0895秒,远低于150毫秒的安全延迟期限。
▍从实验室到手术台的验证
研究团队通过一系列严格的体外和离体实验,全面验证了系统的实际手术能力。
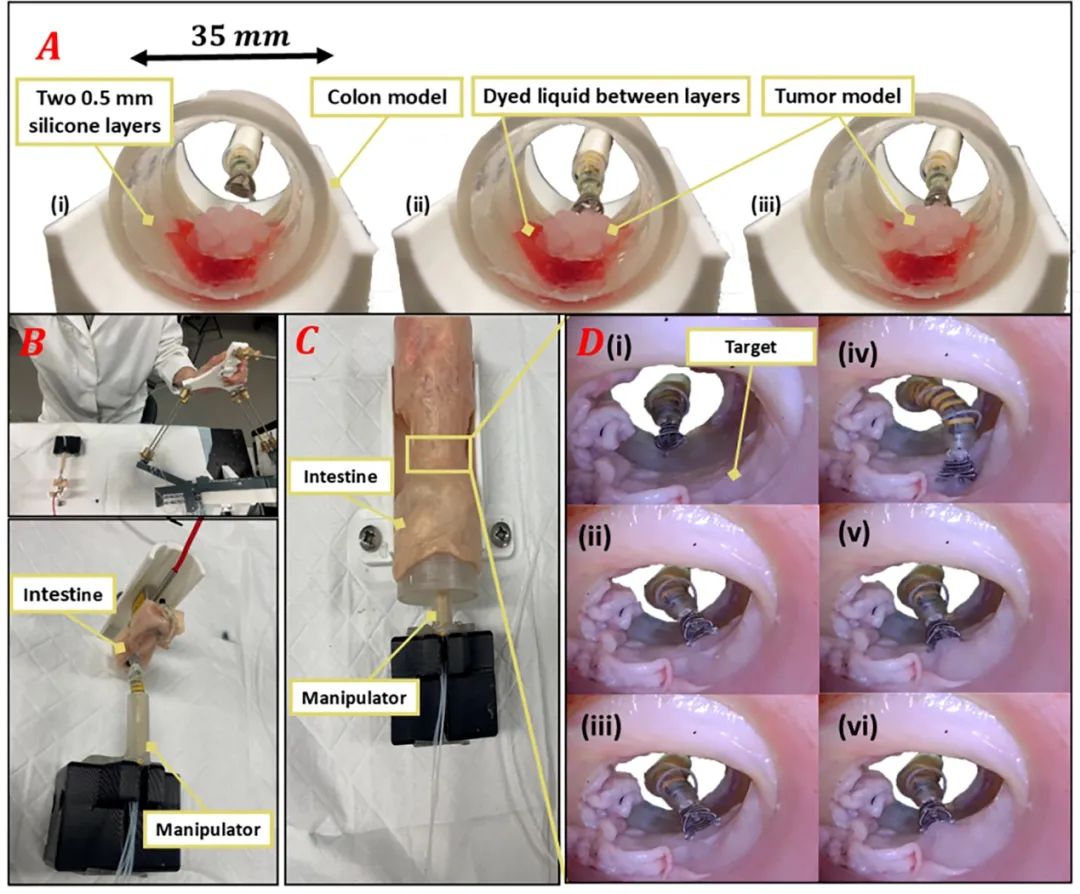
在体外实验中,研究人员精心制作了一个硅胶结肠模型。模型包含两层各0.5毫米厚的硅胶层,分别代表黏膜层和黏膜下层,材料选用了杨氏模量接近真实结肠黏膜层的EcoFlex 00-10。他们还制作了一个直径20毫米、高6.8毫米的侧向扩散型肿瘤模型,使用Dragon Skin 10材料,并用Sil-Poxy粘合剂将其固定在黏膜层上。
实验过程展现了系统的出色操控性。操作者单手操控主控制器,成功引导抓持器穿过模拟肠道接近肿瘤。到达目标位置后,通过主控制器的扳机打开抓持器爪子,推进末端执行器使抓持器包围病变部分,然后释放压力让爪子牢牢抓住肿瘤。通过回缩末端执行器,抓持器成功提升了肿瘤和附着的黏膜层,注入的染色液体向中心汇聚,清晰地显示了组织被提升的效果。
离体实验使用了从当地超市购买的新鲜猪大肠,更接近真实的手术环境。研究人员在黏膜下层做了一个小切口,在黏膜下层和肌肉层之间插入一小块硅胶作为模拟病变目标。为了稳定工作空间,他们在肠道内插入了两个外径40毫米的3D打印模型。
实验不仅验证了抓取功能,还成功测试了与电切装置的协同工作。软体切割臂配备了0.3毫米直径的金属切割头,连接到SURTRON 120电外科单元作为单极电极。在双通道支架的配置下,抓持器位于切割器上方,两者协同完成了完整的ESD手术流程。
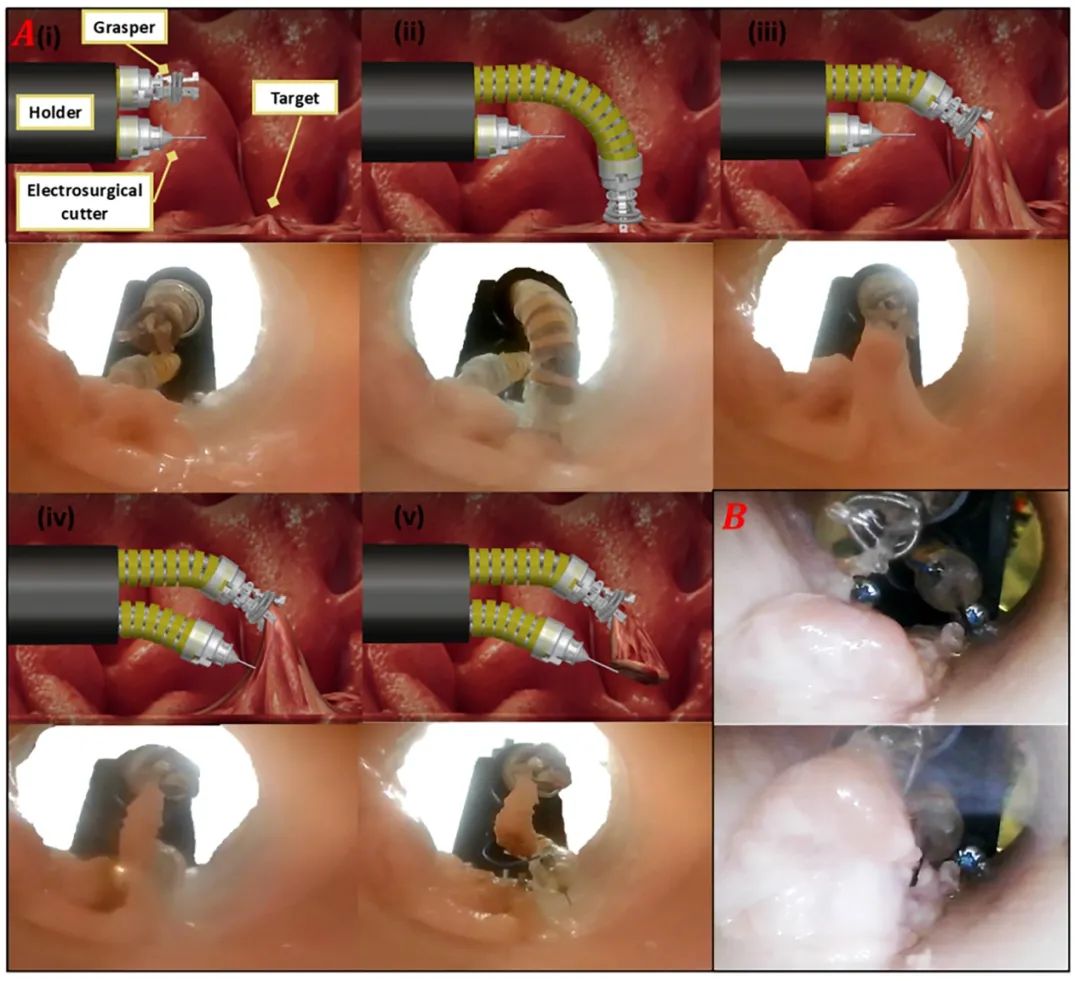
手术过程展现了系统的临床应用潜力。抓持器首先精确抓取并提升目标组织,为切割器提供清晰的手术视野,这个步骤完美模拟了标准ESD中的黏膜下注射和病变提升阶段。随后,切割器进行电切除,高频电流在切割组织的同时封闭周围血管,成功完成了病变组织的完整切除。
耐久性测试进一步证明了系统的可靠性。在0.2赫兹频率下连续工作超过40分钟,这个时间超过了平均环形切割时间的两倍。测试结果显示,Y轴位移偏移仅为0.9%,证明了系统在长时间手术过程中能够保持稳定的性能。
与现有手术系统的对比更凸显了TSGS的优势。在提升力方面,TSGS的3.88牛顿超过了FPCW的1.54牛顿、STRAS的0.9牛顿和Lau等人系统的0.47牛顿。虽然RMIS系统能产生10牛顿的力,但其9.5毫米的直径限制了在狭窄肠段的应用。TSGS保持5.5毫米的紧凑直径同时,还能覆盖整个结肠范围,包括盲肠和回盲瓣等传统系统难以到达的区域。
▍结语与展望
研究团队表示,未来将重点改进触觉反馈功能,让操作者在组织操作过程中获得更好的控制感。同时,他们还计划集成图像处理技术,提供更好的视觉反馈和稳定机制。
这项研究由UNSW生物医学工程研究生院的Thanh Nho Do教授领导,第一作者为博士生朱可凡。研究得到了UNSW Scientia Fellowship、澳大利亚癌症研究所职业发展奖学金等多项基金支持。
这套创新的软体机器人系统不仅为ESD手术提供了新的解决方案,其设计理念还有望应用于其他自然腔道内窥镜手术领域,如经鼻内窥镜手术和经尿道膀胱肿瘤切除术等。
随着技术的进一步完善,这种无需电机、完全液压驱动的软体手术机器人,或将为微创手术带来新的变革。
▍期刊简介
Cyborg and Bionic Systems 《类生命系统(英文)》期刊是由北京理工大学(BIT)和美国科学促进会(AAAS)/ Science 共同打造的综合性高水平国际化英文科技期刊,主要涵盖机器人、生物医学工程及神经工程三大交叉领域,主编为中国工程院院士王振常教授。文章于2021年1月正式上线,入选“中国科技期刊卓越行动计划二期英文梯队期刊”和“2024年度支持北京市高水平国际科期刊建设储备项目(强刊提升)”,已被SCIE、EI、Scopus、Pubmed、DOAJ中国科技核心期刊等数据库收录。2025年6月科睿唯安公布的JCR报告中IF=18.1,在Robotics学科全部期刊排名第2位,在Engineering, Biomedical学科全部期刊排名第4位。中科院分区大类计算机科学1区Top;小类工程:生物医学1区,机器人学1区。
来源:类生命系统
如需咨询企业合作事宜,欢迎联系机器人大讲堂-客服(19560423866,手机与微信同号)进行对接。
----------------END-------------------


工业机器人企业
埃斯顿自动化 | 埃夫特机器人 | 非夕科技 | 法奥机器人 | 越疆机器人 | 节卡机器人 | 松灵机器人 | 珞石机器人 | 盈连科技 | 集萃智造 | 优傲机器人 | CGXi长广溪智造 | 阿童木机器人 | 极智嘉
服务与特种机器人企业
医疗机器人企业
元化智能 | 天智航 | 思哲睿智能医疗 | 精锋医疗 | 佗道医疗 | 真易达 | 术锐®机器人 | 罗森博特 | 磅客策 | 柏惠维康 | 迪视医疗 | 水木东方
人形机器人企业
优必选科技 | 宇树 | 云深处 | 星动纪元 | 伟景机器人 | 逐际动力 | 乐聚机器人 | 大象机器人 | 中科深谷 | 魔法原子 | 众擎机器人 | 帕西尼感知 | 赛博格机器人 | 数字华夏 | 理工华汇 | 傅利叶智能 | 天链机器人 | 开普勒人形机器人 | 灵宝CASBOT | 清宝机器人 | 浙江人形机器人创新中心 | 动易科技| 智身科技 | PNDbotics
具身智能企业
跨维智能 | 银河通用 | 千寻智能 | 灵心巧手 | 睿尔曼智能 | 微亿智造 | 推行科技 | 中科硅纪 | 枢途科技 | 灵巧智能 | 星尘智能 | 穹彻智能 | 方舟无限 | 科大讯飞 | 北京人形机器人创新中心| 国地共建人形机器人创新中心 | 擎朗智能 | 戴盟机器人 | 视比特机器人| 星海图 | 月泉仿生
核心零部件企业
绿的谐波 | 因时机器人 | 坤维科技 | 脉塔智能 | 青瞳视觉 | 本末科技 | 鑫精诚传感器 | 蓝点触控 | BrainCo强脑科技 | 宇立仪器 | 极亚精机 | 思岚科技 | 神源生 | 非普导航科技 | 锐驰智光 | NOKOV度量科技 | 因克斯 | 褔德机器人 | 巨蟹智能驱动 | 微悍动力 | 凌云光 元客视界 | 璇玑动力| 意优科技| 瑞源精密 | 灵足时代 | Xynova曦诺未来
教育机器人企业
加入社群
欢迎加入【机器人大讲堂】读者讨论群, 共同探讨机器人相关领域话题,共享前沿科技及产业动态,添加微信“robospeak2018”入群!


看累了吗?戳一下“在看”支持我们吧