早在今年5月,马斯克在《让人类成为多星球物种》的演讲中不仅喊出了“让人类走向群星之间”的口号,还放出明年要上火星的豪言壮语,引起国内外社交媒体热烈讨论。
不过,当我们畅想未来在月球或火星上建立永久家园时,一个严峻的挑战却横亘眼前:如何抵御致命的宇宙辐射和极端温度?

答案可能并不在眼前的地表,而深藏于其下——火星那些蜿蜒曲折的熔岩洞穴,堪称是极端环境中的“生命绿洲”,它们厚实的岩层能完美屏蔽致命的宇宙辐射,其内部维持着近乎恒定的温度。所以其不仅是寻找地外生命痕迹的理想场所,更是未来人类建造永久基地的绝佳选址。
然而,深入这些洞穴对人类宇航员而言风险极高。尽管人类已发射超过250个探测器探索地外天体,但认知仍主要停留于表面。考虑到地外熔岩洞穴难以进入的特性,使用机器人团队进行探索不仅更安全,也更具经济效益。而地球上的类似场景虽已初步验证了机器人的能力,但它们在太空严苛环境下的适应性仍需深入研究。
而为攻克这一极限探索难题,一个由德国人工智能研究中心(DFKI)等欧洲顶尖机构组成的团队,提出并成功验证了一套完整的、由异构机器人团队执行的自主探索方案。这套方案的核心在于构建了一支功能互补的机器人团队,并将其应用于一个系统分解的四阶段任务流程中。
近日,该研究成果以“Cooperative robotic exploration of a planetary skylight surface and lava cave”为题,于近日发表在国际顶级期刊Science Robotics上。
▍功能互补的异构机器人团队
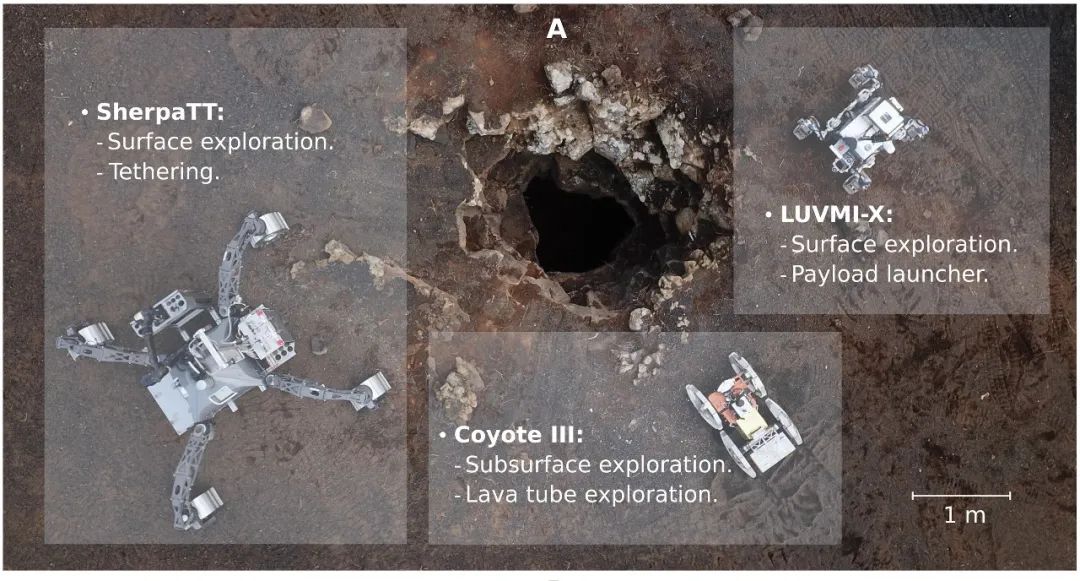
这个机器人团队的核心,是由三个形态功能各异的机器人组成:
首先,SherpaTT是一款混合轮腿式探测车,占地面积可变,配备全阿克曼转向系统,满载时重量约为210 公斤。该探测车通过外部航空电子箱进行扩展,该电子箱使用代表性的太空电子元件提供自主导航和测绘功能。SherpaTT 配备一个具有六个自由度 (DoF) 的机械臂。地球重力环境下 25 公斤的最大有效载荷受球形腕关节的限制。其机械特性使其适合携带和部署所需的有效载荷,以及在下降过程中充当移动锚点。

参与此次任务的第二辆火星车是Coyote III。它是一款小型火星车,重量轻(约20 公斤),机动性强,适合进行绳降和探索狭窄的熔岩管。它采用滑移转向移动方式,配备四个车轮和用于后轮轴的被动接头,提高了系统在不规则地形上的稳定性。Coyote III 还配备了探地雷达 (GPR),能够探测地下以发现熔岩管。为了进行绳降作业,团队还设计了一个系绳管理和对接系统 (TMDS),其中包含连接 SherpaTT 和 Coyote III 的系绳。系绳卷绕在 TMDS 内部的驱动轴上,以控制收放速度。

值得注意的是,系绳除了用作绳索帮助Coyote III从天窗下降之外,还能将SherpaTT的电力和数据传输到TMDS,从而控制其执行器。此外,该链路还可用于为熔岩管内的Coyote III提供能量,并实现两辆火星探测车之间的通信。

最后,LUVMI-X是一款轻型且经济高效的月球车,旨在探索月球挥发物的资源潜力。它可以与SherpaTT协作进行自主导航和测绘,以探索天窗周围的区域。LUVMI-X的设计使其能够根据任务的科学性质携带一组可配置的有效载荷。在此次任务中,LUVMI-X配备了一个带传感器的有效载荷立方体和一个用于将有效载荷。

那么,这些机器人是如何协同工作的呢? 答案是团队架构的核心任务管理子系统(CMS)。机器人由连接到CMS的系统控制,CMS负责通过制导、导航和控制(GNC)堆栈指挥机器人,使它们能够自主探索天窗区域。为此,每个机器人都配备了不同的传感器用于环境感知和自身定位。此外,它们还拥有执行特定任务的专属硬件:Coyote III配备了探地雷达(GPR)用于地下探索,并与TMDS对接以便绳降;SherpaTT负责运输并部署TMDS,并利用其机械臂在绳降任务中为Coyote III提供关键支持;LUVMI-X则通过其有效载荷立方体获取天窗的3D图像,以确定合适的绳降路径。

▍环环相扣的四阶段自主探索流程
为了验证所提方法和机器人团队的可行性,在西班牙兰萨罗特岛火山岛上进行了实地测试。选定的天窗是位于该岛北部的广阔的拉科罗纳熔岩管网络的一部分。整个探索任务被清晰地分解为四个环环相扣的阶段,并在西班牙兰萨罗特岛熔岩洞穴进行的为期21天“模拟外星”实地测试中成功执行:
地表协同测绘:在进入洞穴前,需要对周边地表彻底“摸底”。SherpaTT和LUVMI-X被分配至天窗周围不同区域,自主规划路径,利用视觉传感器进行环境测绘。它们生成的局部地图实时融合,形成高精度的协同数字高程图(DEM)。精度验证表明,地图点的平均水平误差仅为0.298米(标准差0.179米),高程误差虽在交界处因微小系统性偏差存在轻微差异,但总体精度完全满足后续任务需求。

天窗勘测:在完成地表测绘后,为安全垂降,必须精确掌握天窗内部结构。LUVMI-X行驶至天窗边缘,利用弹射装置将搭载RGB-D相机和IMU的传感器立方体垂降入洞穴(实验中通过滑轮系统模拟月球重力下的缓慢下降)。立方体下降过程中持续采集数据并回传,最终融合生成完整的天窗内部三维点云模型。分析此模型可精确定位天窗最窄处(“瓶颈”直径1.85米),并识别出坡度最缓、最安全的最佳入口点。

垂降进入:这是任务中技术挑战最大、最关键的环节。Coyote III首先自主行驶至SherpaTT部署的系留管理与对接系统(TMDS),完成机械、电力和数据的对接。随后驶向天窗边缘开始垂降。在此过程中,SherpaTT扮演双重核心角色:一是作为稳固停驻的移动锚点提供支撑;二是利用其机械臂实时感知系绳张力,并通过模型预测控制器(MPC)以协同调整底盘与机械臂姿态,始终将作用在脆弱腕关节上的力矩最小化。实验数据证实,在整个垂降过程中,所有机械臂关节的力矩均被有效控制在安全极限之内。

洞内探索:成功垂降后,Coyote III在洞穴内部执行探索任务,利用其搭载的设备进行探测。通过远程控制,Coyote III在整个熔岩洞中展示了其移动能力,在垂直横截面半径在50到4米,倾角为25°,表面布满砾石、沙子、熔岩壳的洞穴中穿越了235米。 接着Coyote III利用其搭载的ToF相机,在行进过程中不断采集洞穴内部的点云数据。这些数据被离线处理后,生成了洞穴的三维重建模型,成功完成其洞穴探索任务。

▍结语
随着美国Artemis月球计划、中国载人月球探测等重大工程的推进,月球与火星的地下世界已成为下一个前沿竞争领域。所以这项研究的意义远不止于一次成功的野外演示。它为我们勾勒出了一幅未来地外深度探索的清晰蓝图:由异构机器人组成的协同系统,是探索地外熔岩洞穴等极端环境的可行且高效的方案。
论文链接:https://www.science.org/doi/10.1126/scirobotics.adj9699
如需咨询企业合作事宜,欢迎联系机器人大讲堂-客服(19560423866,手机与微信同号)进行对接。
----------------END-------------------


工业机器人企业
埃斯顿自动化 | 埃夫特机器人 | 非夕科技 | 法奥机器人 | 越疆机器人 | 节卡机器人 | 松灵机器人 | 珞石机器人 | 盈连科技 | 集萃智造 | 优傲机器人 | CGXi长广溪智造 | 阿童木机器人 | 极智嘉
服务与特种机器人企业
医疗机器人企业
元化智能 | 天智航 | 思哲睿智能医疗 | 精锋医疗 | 佗道医疗 | 真易达 | 术锐®机器人 | 罗森博特 | 磅客策 | 柏惠维康 | 迪视医疗 | 水木东方
人形机器人企业
优必选科技 | 宇树 | 云深处 | 星动纪元 | 伟景机器人 | 逐际动力 | 乐聚机器人 | 大象机器人 | 中科深谷 | 魔法原子 | 众擎机器人 | 帕西尼感知 | 赛博格机器人 | 数字华夏 | 理工华汇 | 傅利叶智能 | 天链机器人 | 开普勒人形机器人 | 灵宝CASBOT | 清宝机器人 | 浙江人形机器人创新中心 | 动易科技 | 智身科技 | PNDbotics
具身智能企业
跨维智能 | 银河通用 | 千寻智能 | 灵心巧手 | 睿尔曼智能 | 微亿智造 | 推行科技 | 中科硅纪 | 枢途科技 | 灵巧智能 | 星尘智能 | 穹彻智能 | 方舟无限 | 科大讯飞 | 北京人形机器人创新中心| 国地共建人形机器人创新中心 | 擎朗智能 | 戴盟机器人 | 视比特机器人| 星海图 | 月泉仿生
核心零部件企业
绿的谐波 | 因时机器人 | 坤维科技 | 脉塔智能 | 青瞳视觉 | 本末科技 | 鑫精诚传感器 | 蓝点触控 | BrainCo强脑科技 | 宇立仪器 | 极亚精机 | 思岚科技 | 神源生 | 非普导航科技 | 锐驰智光 | NOKOV度量科技 | 因克斯 | 褔德机器人 | 巨蟹智能驱动 | 微悍动力 | 凌云光 元客视界 | 璇玑动力| 意优科技| 瑞源精密 | 灵足时代 | Xynova曦诺未来
教育机器人企业
加入社群
欢迎加入【机器人大讲堂】读者讨论群, 共同探讨机器人相关领域话题,共享前沿科技及产业动态,添加微信“robospeak2018”入群!


看累了吗?戳一下“在看”支持我们吧