一 产品介绍
3d结构光主要针对“漫反射”物体进行三维重建,常用于机械臂抓取、视觉测量、缺陷检测等领域。目前主流结构光技术有:散斑结构光(机器人导航)、线结构光(视觉测量)、面结构光技术(机械臂抓取等快速测量场景)。我们推出了「精迅」系列设备,是一台面向科研级的高速、高精度、源码级开发的3d面结构光测量设备,能够自由DIY配置,并且与机械臂等结合,开发相应的应用。
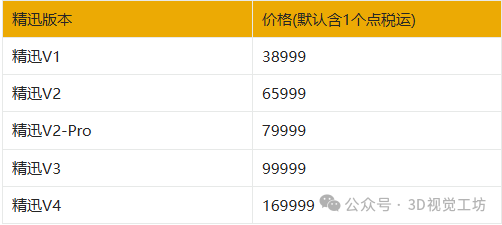
下述是我们推出的「精迅」系列产品:


它们之间的硬件/软件差别:

简单来说:
精迅V1:采用DLP3010光机,具有完备的单目/双目标定、重建功能,适合学习结构光三维重建、PCL点云处理课程。
精迅V2/V2-Pro:采用DLP3010光机,界面经过高度优化,一键重建、点云滤波、显示,适合手在眼上的视觉引导、测量场景。可很方便在该套代码下开发属于自己的应用。
精迅V3:采用DLP4710光机,分辨率更高,支持彩色条纹写入,最高亮度1000LM,无惧户外和黑色场景,适合大范围场景重建。。但重量更重(>4kg),适合眼在手外的视觉引导场景。
精迅V4:采用测量级DLP4710光机,可更换任意焦段的C口镜头,线性度极佳,采用被动式铜管散热避免温漂、振动等影响。相机采用海康高端1400万像素全局相机,重建细节丰富。采用CUDA加速计算、点云处理全过程。算法经过高度优化,适配高分辨率相机。
二 产品性能

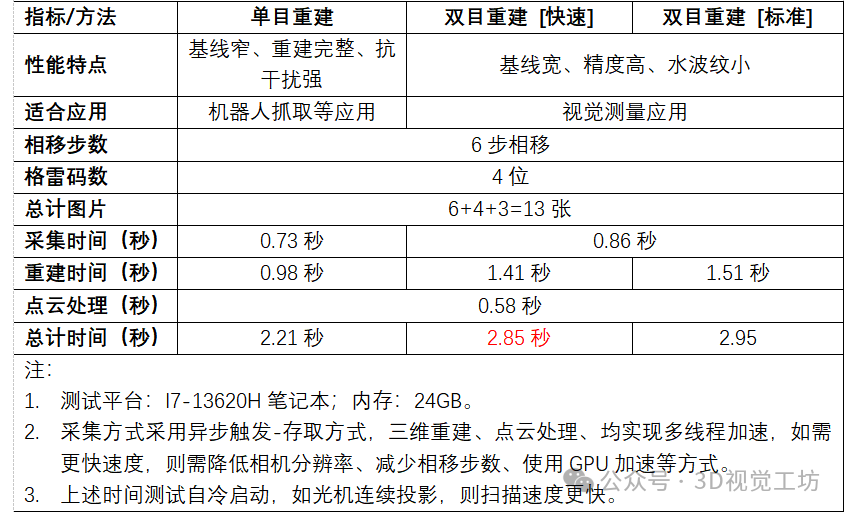
重建耗时(精迅V2,CPU版本)(按帧率30FPS进行单次投影,实际投影最高帧率60FPS):
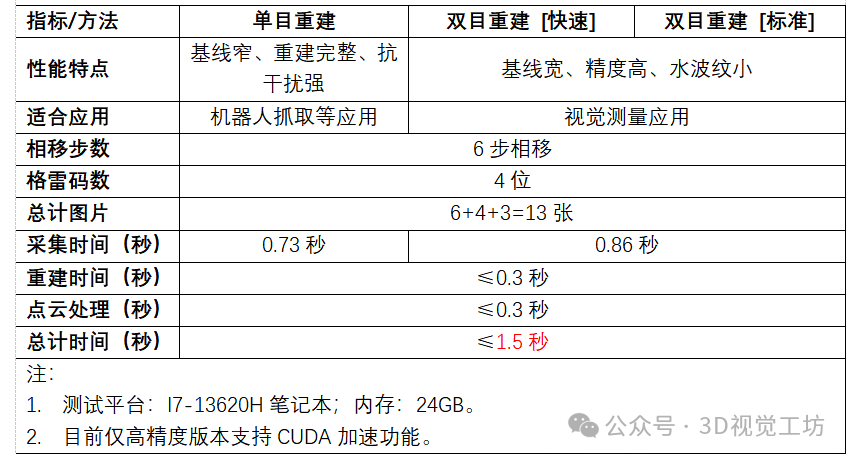
重建耗时(GPU版本)(按帧率30FPS进行单次投影,实际投影最高帧率60FPS):
三 精迅V1~V4提供的源码模块

四 软件介绍
示范QT开发的demo升级如下:
相比较精迅V1,主要提升如下:
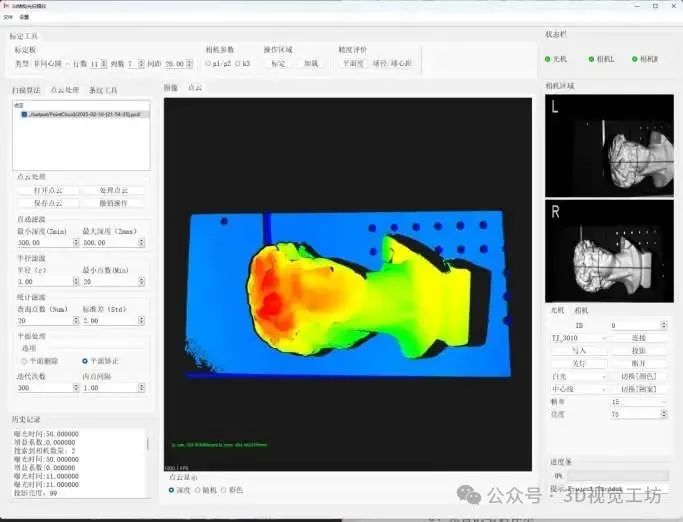
界面升级:将硬件控制、系统标定、三维重建集成在一个界面,更便于使用。
点云处理:可以手动设置滤波参数,自动化处理点云,并且可以与点云进行交互、裁切、表面重建算法,点云特征拼接算法。
更高精度:相机分辨率升级到200万(最高支持2000万像素),并且使用更高精度的单目标定重建算法,大幅提升单目重建精度。
HDR算法:优化HDR高动态合成算法,轻松应对大多数高动态范围(铝合金、黑色背景)等测量场景。
拓展性:源码级开放,支持OpenCV、Halcon、VisionMaster等各类主流机器视觉库二次开发。
AI开发:可以结合OpenCV部署各类AI应用,如6d姿态抓取等,结合我们工坊推出课程,可以完成大多数3d视觉领域的任务。
从零开始,源码级教学!带你完全从零掌握标定、重建、QT、PCL等基础3d视觉知识,完成职业提升培训。
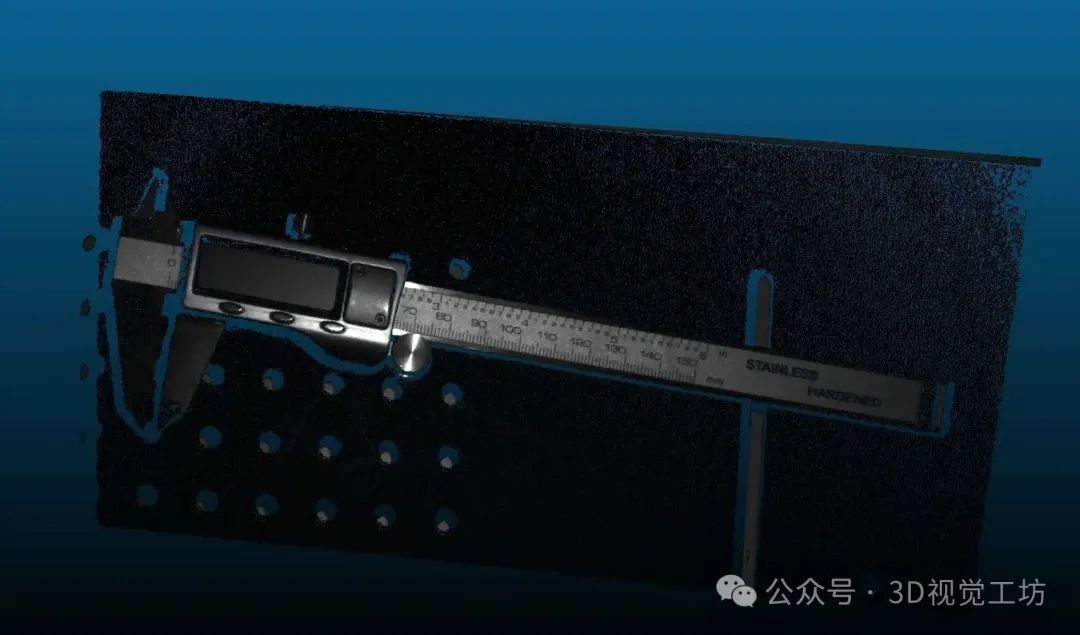
五 测量效果
实际测量场景

点云重建效果






六 高阶功能




七 应用场景

八 购买本套硬件,将会配套赠送哪些课程?
8.1 课程1:结构光三维重建高阶班专属视频课程+课件

8.2 课程2:三维点云高阶班专属视频课程+课件

九 产品采购渠道