
前言:笔者在总结这篇文章的时候也自己学习了,若有不全的地方请见参考资料!文章中部分图片和段落使用了ai工具优化!(注:参考资料见文末)

一、简介
人形机器人是一种被设计成在形状和功能上类似于人体的机器人,通常具有躯干、头部、两条手臂和两条腿。一些机器人使用轮子作为替代腿部,并保持类似人类的上半身。这些机器人不仅被设计成模仿人类的外貌,还被设计成复制人类的动作、行为和能力。人形设计的主要目的是功能性的:使机器人能够在为人类建造的环境中高效运行,而不需要对现有基础设施进行重大改造。这种类似人类的形态使它们能够与工具互动、导航空间并执行最初为人类设计的任务,例如爬楼梯、开门或操作物体。
人形机器人配备了先进的组件,包括:
(1)控制运动和模仿人类灵巧度的执行器
(2)传感器(视觉、听觉、触觉)模拟人类感官
(3)机器人上的计算系统和人工智能,使感知、规划和自主操作成为可能
这些机器人通过人工智能和机器学习越来越能够执行复杂的任务,使它们在模拟环境中训练后能够适应不可预测的现实世界场景。例如,波士顿动力公司的 Atlas 机器人首先在基于物理的模拟环境中掌握像 Parkour 和后空翻这样的动态动作,这些动作可以安全地失败数千次,然后将这种学习转移到物理机器人上,当遇到不平整的表面或意外障碍物等现实世界的变化时,这些机器人能够表现出惊人的适应能力。
二、国内外人形机器人图鉴





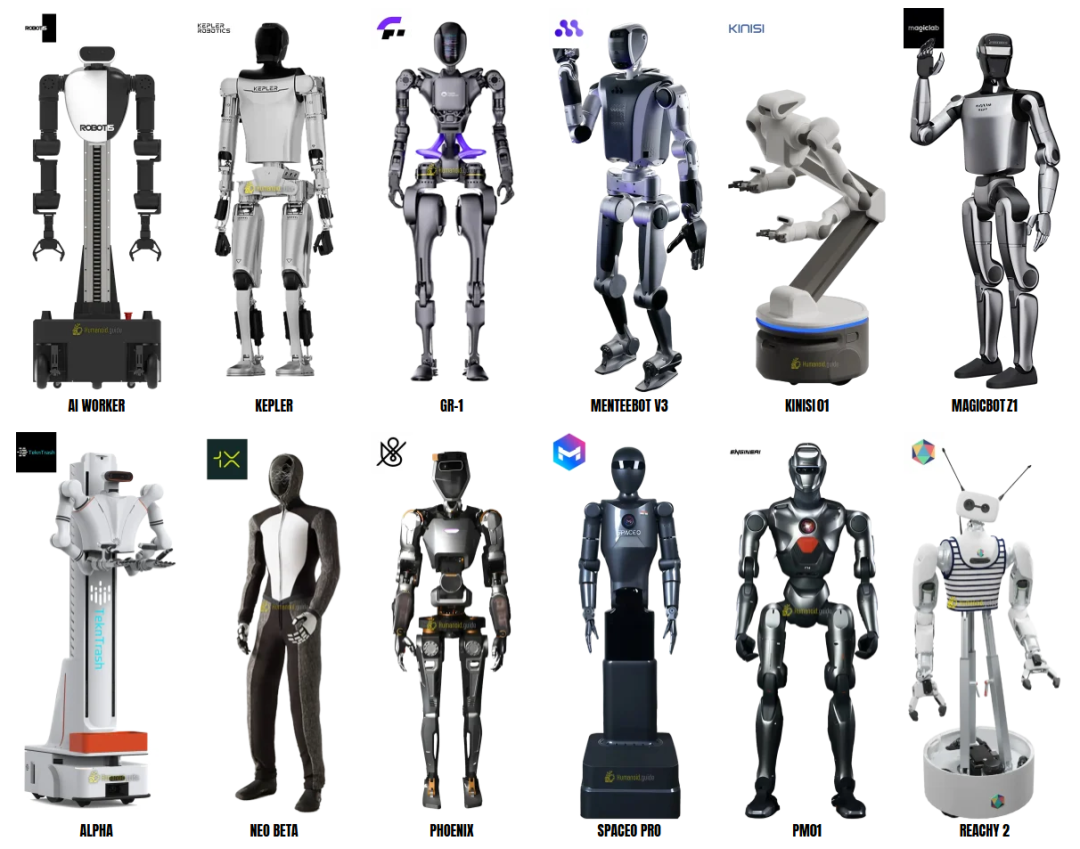

三、国内人形机器人图鉴(110份)






参考资料(已汇总在Excel里,按文章标题关键字查找自取!)

1、国内人形机器人110多个

2、人形机器人报告

3、人形机器人图网站

4、人形机器人汇总

Tips2:评论区留言所需资料,找到就发出来!











