核心总结
一、教材基础信息与编写背景
《空中机器人(固定翼)专项教育教材》由丑武胜、贾玉红、何宸光、雷旭升编著,2013 年 9 月由哈尔滨工程大学出版社出版,ISBN 为 978-7-5661-0690-2,全书共 147 千字,定价 25.00 元。其受众广泛,既适合空中机器人爱好者入门学习,也为相关科研人员、教育工作者提供专业参考,是国内较早系统聚焦固定翼空中机器人技术的专项教材。
编写背景源于多方面需求与技术发展趋势。从政策与产业层面看,21 世纪初机器人技术成为多学科交叉的战略性高技术,2012 年国家科技部发布《服务机器人科技发展 “十二五” 专项规划》,明确其在国防军事、智能制造、应急处理等领域的重要支撑作用。从教育与体育领域看,国家体育总局调研发现,欧美发达国家已将机器人教育纳入中小学必修课,国际机器人赛事多由军事或太空部门主办,而我国虽将机器人运动纳入国家社会体育运动项目(定义为 “中国素质体育机器人运动”),但缺乏配套专项教材。此时国内机器人教育多分散于通用课程,难以满足专项学习需求,该教材的出版填补了这一空白,为机器人基础教育、专项教育及学历教育普及奠定基础,同时为素质体育机器人赛事规范开展提供理论依据。
二、固定翼空中机器人基础认知
(一)分类体系与典型案例
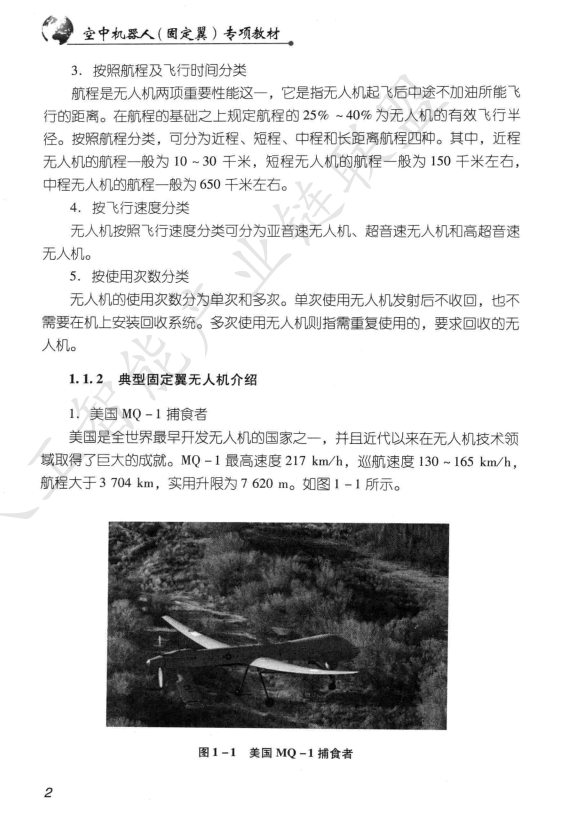
固定翼无人机分类维度丰富,可根据不同需求划分:按外观尺寸,分为微型(如美国定义翼展 15cm 以下,英国定义翼展 / 最大尺寸<0.5m、使用距离约 200m)、小型(质量约 10kg,成本低、功能单一)、中型(尺寸与性能介于小、大型之间)、大型(接近小型载人飞机,功能复杂);按飞行方式,分为固定翼、旋翼、扑翼等,前两者应用最广,扑翼多用于微型设备;按航程,分为近程(10-30km)、短程(约 150km)、中程(约 650km)、长航程;按速度,分为亚音速、超音速、高超音速;按使用次数,分为单次使用(无回收系统)和多次使用(需回收)。
典型案例展现了不同应用定位的固定翼无人机特性:美国 MQ-1 “捕食者”,最高速度 217km/h,巡航速度 130-165km/h,航程超 3704km,实用升限 7620m,是早期察打一体无人机代表;美国 RQ-4A “全球鹰”,机身长 13.5m、翼展 35.4m,最大起飞质量 11622kg,航程 25945km,续航 41h,擅长高空长航时侦察;以色列 “苍鹭”,翼展 16.6m,续航约 50h,适用于长时间监视;以色列 “搜索者”,采用上单翼结构,最长留空 14h,活动半径 120-220km,多用于战术侦察。
(二)核心特性与系统组成
固定翼空中机器人是多学科融合的系统工程,涉及航空理论、计算机技术、控制工程等,应用时需结合飞行器设计、传感器融合、导航制导等知识。与载人飞机相比,其优势明显:机体采用复合材料,无驾驶舱设计减小体积与质量,提升机动性;可承载多载荷,实现远距长航时飞行;具备自主起降与航线飞行能力;能在核污染区、地震灾区等危险环境作业。但也存在劣势,如飞行易受干扰、操控有滞后性。
完整系统由四部分构成:地面站系统,含起降控制、遥控监测设备及辅助工具,是人机交互核心;飞行系统,涵盖飞机本体、动力推进、飞行控制、导航等子系统,是飞行执行关键;任务载荷系统,即执行任务的设备(如相机、传感器),决定任务能力;控制保障人员,经专业培训负责起降、监控,保障系统稳定运行。
(三)性能指标与关键技术
性能指标决定无人机任务适配性:航程受机体结构、发动机、燃料等影响;续航时间衡量持续作业能力;本体尺寸影响抗环境干扰能力;飞行速度需匹配任务需求(如快速响应需高速);升限分理论升限(无剩余功率高度)与实用升限(垂直上升速度 5m/s 时高度);有效载荷质量决定设备携带能力;发射回收方式影响使用便利性(如弹射起飞适用于舰载);爬升率影响快速到达指定高度的能力;可靠性以无故障概率衡量;经济性涵盖设计、制造、维护成本。
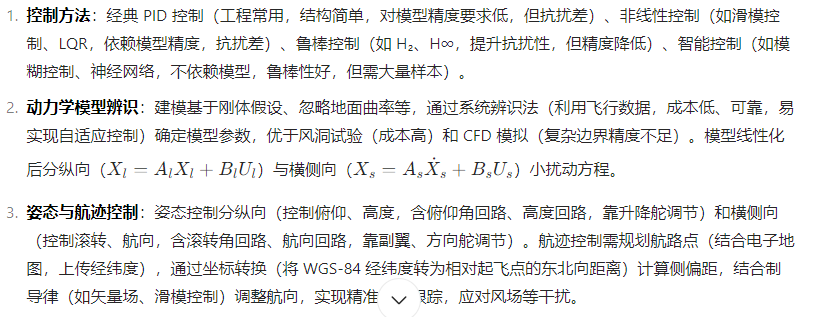
关键技术支撑无人机性能提升:动力技术,需低油耗、高可靠性发动机(如活塞式、太阳能式,太阳能发动机前景广阔);通信技术,通过宽带数据链实现超视距控制,保障人机交互;飞行控制技术,多模型自适应控制可根据工况自主适配模型与控制器,提升鲁棒性;人工智能技术,结合智能传感器实现自主飞行,按指令或程序完成任务。
(四)应用领域
当前应用集中在多场景:监测领域,用于航拍、地震抢险探测、气象数据采集、核泄漏监测;运输领域,在偏远地区或紧急场景输送物资;反恐领域,执行侦察或非致命威慑任务。未来还将拓展至农林业(播种喷药)、水产业(巡逻监测)、环境监测(大气、土壤、海洋)、灾害应对(灭火、搜救)等领域,助力各行业效率提升。
三、基本飞行原理
(一)飞行环境特性
大气是航空器唯一飞行环境,其分层与特性影响飞行安全:大气 90% 质量集中在 15km 高度内,按参数变化分为对流层、平流层、中间层、热层、散逸层。对流层是天气变化主要区域,气温随高度升高而降低,易出现结冰;平流层气流平稳、能见度好,是理想飞行层;中间层气温随高度下降;热层呈高度电离状态;散逸层空气极稀薄。
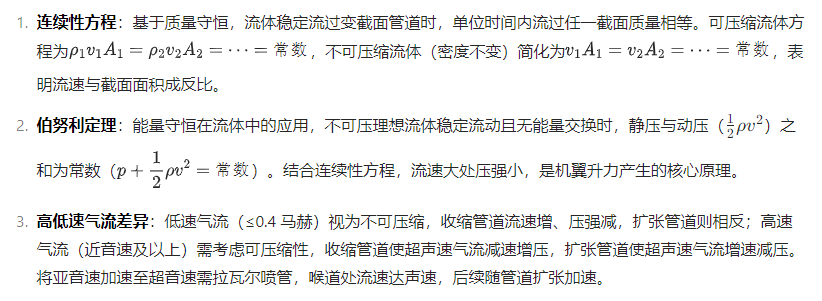
大气物理特性关键:连续性,视为连续介质便于空气动力学分析;黏性,产生摩擦阻力,高速时引发气动加热;可压缩性,低速时可忽略,高速时需用马赫数(速度与声速比)衡量,不同马赫数对应不同飞行状态(低速≤0.4、亚音速 0.4-0.85 等);国际标准大气,规定海平面参数(气温 15℃、压强 1 标准大气压等),为性能描述提供统一标准,但需结合实际大气修正。
(二)空气流动规律
(三)升力与阻力机制

增升装置用于低速(起飞、着陆)提升升力,包括前缘襟翼(机翼前缘)和后缘襟翼(机翼后缘)。后缘襟翼应用广,如简单式(增升差)、富勒式(后退开缝,三重增升效果)、双缝式(多一重增升,常与前缘缝翼配合)。增升原理为改变翼型弯度、增大机翼面积、控制附面层延缓气流分离。
阻力类型与减阻:低速飞机阻力有摩擦阻力(与黏性、表面粗糙相关,优化表面光滑度减阻)、压差阻力(与迎风面积、形状相关,整流成流线型减阻)、诱导阻力(翼尖涡流导致,增大展弦比、加装翼梢小翼减阻)、干扰阻力(部件气流干扰导致,优化部件位置减阻);跨音速后有激波阻力(超声速飞行时空气压缩形成,采用尖前缘、后掠机翼减阻)。
升阻比:同一迎角下升力与阻力的比值,影响经济性能与航程,升阻比越大性能越好。最大升阻比对应迎角在阻力系数最低与升力系数最大之间,飞机多以 3-5° 迎角(近最大升阻比)飞行,设计时使巡航速度对应最大升阻比速度。
(四)稳定性与操纵性
飞行性能:速度含最小平飞速度(维持水平飞行的最小速度)、最大平飞速度(发动机最大推力下速度)、巡航速度(油耗最小速度);航程受燃油、升阻比影响;升限分静升限(水平飞行最大高度)与动升限(跃升可达高度);起降性能以起降距离、接地 / 离地速度衡量,可通过增升装置、弹射起飞等优化;机动性指改变飞行状态的能力,军用机(如战斗机)要求高,可完成筋斗、过失速机动等,机动性越高对结构强度(过载系数)要求越高。
操纵性:通过操纵升降舵(控制俯仰,超音速飞机多用全动式水平尾翼)、副翼(控制滚转)、方向舵(控制偏航)实现姿态调整。操纵系统含操纵设备(遥控器、地面站)、执行机构(连杆、舵机)、气动舵面(升降舵等)。
稳定性:受扰动后自动恢复平衡的能力,分纵向稳定性(绕横轴,重心在焦点前稳定)、方向稳定性(绕立轴,靠垂直尾翼,侧滑时产稳定力矩)、横侧向稳定性(绕纵轴,靠机翼上反角、后掠角等)。稳定性与操纵性需协调,稳定度过高操纵不灵敏,反之稳定性差。
四、构造与导航控制技术
(一)构造设计与装配
设计要求与材料:结构设计需满足气动要求(适配飞行性能的外形与表面质量)、重量强度要求(轻量化同时保证强度刚度,避免变形或颤振)、使用维护要求(便于检查维修)、工艺经济性要求(简化工艺、控制成本)。常用材料有铝镁合金(轻质、耐腐,用于机身机翼)、合金钢(高强度,用于起落架、大梁)、钛合金(耐高温、高比强度,用于高速飞机)、复合材料(如碳纤维,密度低、比强度高,用于翼面、机身)。
组成与布局:常规飞机由机身、机翼、尾翼、起落架、动力装置组成。布局多样,按机翼与机身位置分上单翼(安定性好)、中单翼(气动干扰小)、下单翼(安全性好);按立尾数量分单立尾(常规型、T 型等)、双立尾(载重大、稳定性好)、V 型尾(隐身性好);按纵向气动布局分常规式(机翼前、平尾后,成熟稳定)、鸭式(平尾在前)、无尾式(阻力小、隐身好)。
装配技术:装配需保证准确度(气动外形、部件相对位置等),基准有以骨架为基准(先装骨架再覆蒙皮,误差由内向外累积)和以蒙皮为基准(先装蒙皮再装骨架,误差靠补偿消除)。定位方法有划线定位(适用于低精度)、装配孔定位(无专用夹具,成批生产常用)、基准零件定位(靠基准件确定位置,适用于复杂结构)。连接技术有铆接(传统可靠,分普通铆接、干涉配合铆接等)、胶接(应力均匀、减重,用于壁板、夹层结构)、焊接(点焊用于薄壁件,胶焊结合点焊与胶接优势)。
(二)导航技术
导航系统用于获取姿态、位置、速度等参数,主要类型有:无线电导航(利用电波测角、测距等,易受干扰)、惯性导航(自主式,靠陀螺、加速度计,误差随时间累积,分平台式、捷联式)、卫星导航(如 GPS,精度高、无误差累积,易受遮挡干扰,无法输出姿态)、组合导航(融合多系统优势,如 SINS/GPS,互补不足)。
MEMS 惯导系统(基于微机电技术)体积小、成本低,适用于空中机器人,含 MEMS 陀螺(测角速度,有双框架驱动式、音叉线振动式等)、MEMS 加速度计(测线加速度,分线性、摆式等),捷联导航算法通过数学平台替代实体平台,需进行坐标系变换(方向余弦矩阵法、四元数法)与导航解算。卫星导航以 GPS 为代表,由空间部分(24 颗卫星,全球覆盖)、地面监控部分(监控站、注入站、主控站)、用户接收机(测伪距或相位,定位精度达米级至厘米级)组成。组合导航(如 SINS/GPS)可提升精度与可靠性,弥补单一系统缺陷。
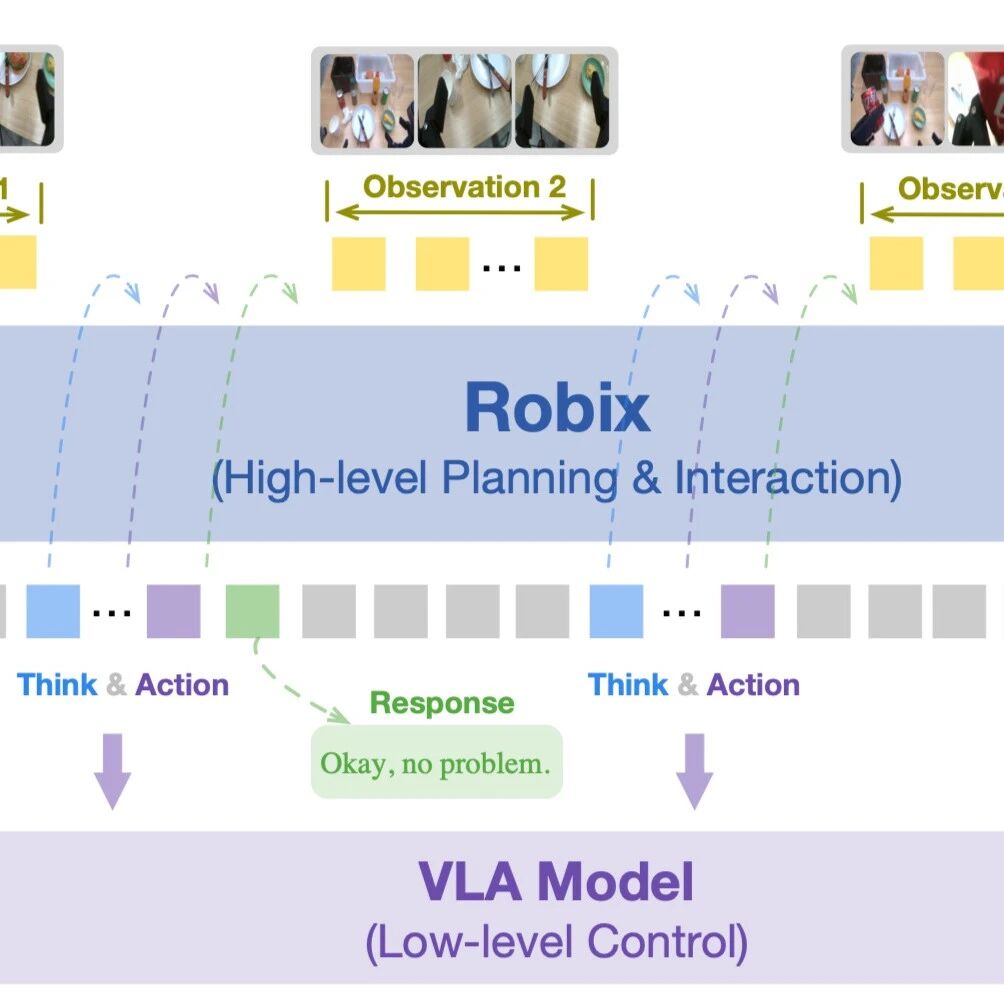
(三)控制技术
五、教材价值与应用意义
该教材系统梳理了固定翼空中机器人的理论与技术,不仅为学习者提供从基础认知到核心技术的完整知识体系,也为科研与教育工作者提供实践参考。其出版推动了我国机器人教育的规范化,助力素质体育机器人运动发展,同时为相关产业(如无人机研发、应用服务)培养技术人才。在实际应用中,教材内容可指导固定翼无人机在监测、救援、农业等领域的技术优化,促进无人机技术更好地服务于社会生产与应急保障。



本书免费下载地址
关注微信公众号“人工智能产业链union”回复关键字“机器人设计09”获取下载地址。
往期推荐:
【AI加油站】机器人设计系列一:《IBM Robocode人工智能机器人研究》从Java编程到智能战斗系统指南(附下载)