随着具身智能、医疗机器人、服务机器人等产业迅速发展,机械臂已成为现代机器人系统的核心部件。它在工业自动化、康复机器人、智能辅助设备等场景中具有不可替代的地位。然而,机械臂相关知识高度交叉,涉及运动学、动力学、控制、路径规划等多个交叉学科领域,知识体系庞杂。

市面上缺乏一套既系统又实战的学习路径,大部分机器人学课程都是聚焦理论讲解,对于机械臂项目实战涵盖的较少。许多初学者想要搭建属于自己的机械臂系统,但面对庞杂理论无从下手,或在仿真与实物间「卡壳」,很难实现从「理解原理」到「实现控制」的完整闭环。


以下是某招聘网站发布的招聘需求和薪资待遇:


为此,我们精心打造了《从0到1手搓一套六轴机械臂》基础课程,旨在帮助学员从零开始,系统构建机械臂的全流程认知,通过理论与实践相结合的方式,让学员不仅掌握机械臂的核心原理,更能亲手搭建并控制属于自己的机械臂系统,实现从理论到实践的跨越。
课程内容
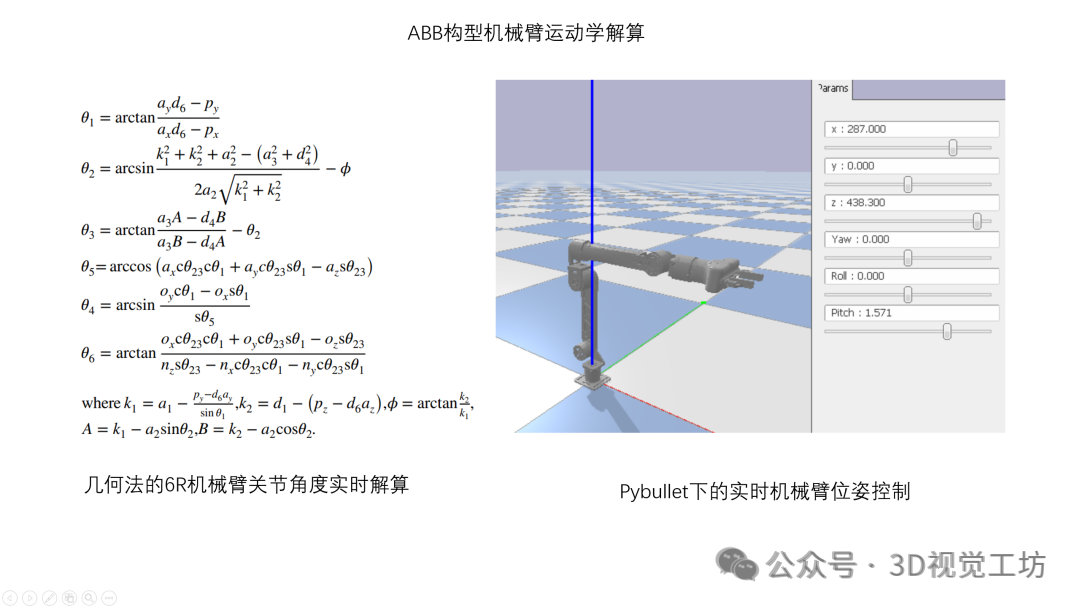
从基础的坐标变换、欧拉角/四元数入手,循序渐进地构建运动学/动力学模型;深入讲解正/逆运动学、雅可比矩阵、路径规划等关键知识;
全流程覆盖从仿真到实物控制实现,涵盖URDF模型导出、PyBullet仿真、关节电机控制、电机补偿、零位标定、定时任务等;
理论结合实践,每一个知识点配套仿真/实操,避免纸上谈兵,真正做到「学完就能上手」;
不仅让你理解系统架构,更带你写出能跑的程序,驱动真实机械臂动作,为日后从事机器人研发、医疗机器人系统开发、科研竞赛打下坚实基础。
主讲介绍
 派派
派派
南方科技大学本硕博
南方科技大学本硕博,具备多年机械臂系统实物开发经验,从事机械臂相关创业多年,擅长机械臂建模与参数辨识、逆运动学与动力学算法设计、传统机械臂控制、以及机械臂实物平台的结构设计与软硬件集成。
课程大纲






课件展示(部分)


面向对象
机械臂初学者:希望系统学习机械臂理论与实战开发的高校学生、研究生或刚入门的工程师,本课程会从基础开始讲起,所有的内容都会有源码支持; 机器人方向的工程开发人员:想要构建属于自己的或者公司的机械臂系统,课程会涵盖部分工业机械臂开发经验; 竞赛与项目开发者:准备参加机器人类竞赛,或正进行相关科研/工程项目的同学; 转型的嵌入式/软件工程师:希望从控制、仿真或软件开发方向切入机器人系统,拓展职业能力边界。
课程特色或亮点
理论结合实战,逐步搭建完整系统
课程以「边讲边做」讲解机械臂核心知识,将复杂的运动学与控制理论拆解为可实践的代码模块,以可运行实战支撑每个概念,助力学员从零构建可控机械臂系统。
系统覆盖从基础建模到实物控制全过程
覆盖坐标变换、正逆运动学等核心机器人学知识,完整介绍从URDF建模到实物调试的全过程,实现「理论 + 仿真 + 实物」一体化教学。
大量图示与动画辅助,帮助理解空间思维
针对齐次变换、欧拉角等抽象内容,课程配有图形演示、动态动画与可交互代码,帮助学员建立直观三维空间概念,降低学习曲线。
代码可跨平台,提供解析解源码,高效运算
不依赖ROS之类的第三方工具,支持部署到嵌入式开发板、windows或者其他系统中,比较适合想做产品的学员学习。
学后收获
本课程作为机器人学基础课程,所有内容都会配有代码和仿真模拟,为后面动力学、机器人应用课程打下坚实的基础;
系统掌握机械臂建模,运动学与控制等核心理论知识、理解机械臂工作原理与控制流程;
构建一套完整的机械臂仿真与实物控制系统,从建模、轨迹规划到控制策略落地;
掌握机械臂实物开发核心流程,包括DH参数标定、电机控制、轨迹追踪等,具备独立搭建控制系统的能力。
开课时间
2025年8月30日晚8点开课,开课后每周更新一章节,提前购买课程的学员可提前学习已更新的课程学习资料!
答疑服务
课程答疑主要在本课程对应的鹅圈子中答疑,学员学习过程中,有任何问题可以随时在鹅圈子中提问。


备注:以上图片和视频部分来自网络,如果侵犯了您的权益,还请联系删除!




![倒计时7天!TI技术培训:ADAS|AIDSP|精密电机控制|多协议无线等[上海 杭州 北京 西安]](https://xtechcon-static.oss-cn-chengdu.aliyuncs.com/xtimes/xtimes/images/2025-10-21/68f70a47e9d3b.jpeg)


![报名倒计时!TI免费培训:ADAS|AIDSP|精密电机控制|多协议无线等[上海 杭州 北京 西安]](https://xtechcon-static.oss-cn-chengdu.aliyuncs.com/xtimes/xtimes/images/2025-10-23/68f9832a00482.jpeg)


