
在人工智能和机器人技术迅猛发展的时代,设计师了解感知器件相关知识至关重要。感知器件,如视觉传感器、距离传感器和触觉传感器,是机器人和智能系统感知环境、收集数据的核心组件。掌握这些知识能够帮助设计师更好地理解和整合这些技术,提升产品的功能性和用户体验。例如,了解传感器的工作原理和限制条件,设计师可以优化产品的外形设计和材料选择,确保传感器的性能和可靠性。此外,感知器件的应用能够推动智能交互设计,使产品更加智能化和人性化。因此,设计师必须不断学习和掌握感知器件相关知识,以应对技术发展的挑战,创造出更符合用户需求的创新产品。

1 传感器概述
定义与功能
分类与应用
视觉传感器: 用于捕捉图像信息,进行物体识别、场景理解等。 力敏传感器: 检测机器人与环境之间的接触力,用于实现精细操作和避免碰撞。 触觉传感器: 模拟人类的触觉,用于检测物体的质地、形状和温度等。 音频传感器: 如麦克风,用于捕捉声音信号,进行语音识别或环境声音分析。 距离传感器: 如超声波传感器、激光雷达(LiDAR),用于测量机器人与障碍物之间的距离,实现避障和导航。 环境传感器: 如温湿度传感器、气体传感器,用于检测周围环境条件,进行相应的环境控制或预警。
2 内部传感器
位置与角度传感器
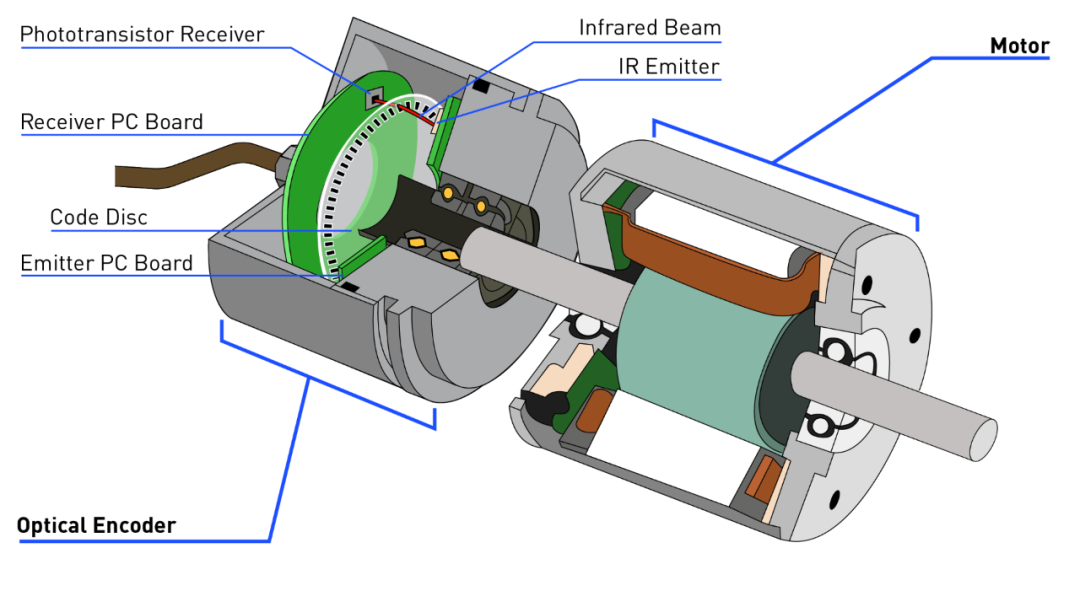
电位器式位移传感器: 这类传感器通过改变电阻值来测量位置变化。它们的结构简单,成本较低,但精度有限,通常用于成本敏感型应用。 光电编码器: 作为一种增量式或绝对式的位置传感器,光电编码器能够提供高精度的位置反馈。它们通过光栅盘和光电检测装置转换机械位移为脉冲信号,从而实现精确的位置测量。在一些高端应用中,如手术机器人,光电编码器能够提供亚毫米级的位置精度。 旋转变压器: 这类传感器利用电磁感应原理测量旋转角度。它们能够在恶劣的工业环境中提供稳定的性能,并且具有较长的使用寿命。
速度与加速度传感器
速度传感器: 这些传感器通常基于电磁感应或光电效应来测量物体的速度。在机器人设计中,速度传感器能够帮助机器人控制其移动速度,优化能量消耗,并在需要时进行快速响应。 加速度传感器: 加速度传感器能够测量由于重力或运动引起的加速度变化。它们在机器人设计中的应用包括跌落检测、动态平衡控制和振动分析。加速度传感器的精度直接影响到机器人的运动控制和稳定性。

3 外部传感器
触觉传感器
电阻式触觉传感器: 通过测量电阻的变化来检测施加在传感器上的压力。这类传感器成本较低,但精度和灵敏度有限,适用于基本的接触检测。 电容式触觉传感器: 利用电容的变化来检测触摸或压力变化。它们具有较高的灵敏度和分辨率,能够提供多点触控信息,适用于需要精细操作的任务。 压电式触觉传感器: 基于压电效应,能够检测快速的压力变化,适用于需要动态力感知的应用,如机器人的跌倒检测或抓取力度控制。 光学触觉传感器: 利用光学原理,如光的折射或反射,来检测压力变化。这类传感器能够提供高分辨率的触觉图像,适用于对物体表面特性进行精细分析的应用。
视觉传感器
摄像头: 摄像头是最常见的视觉传感器,能够捕捉二维图像信息。通过图像处理和计算机视觉技术,机器人可以从图像中提取颜色、形状、纹理等特征信息。 激光扫描仪(LiDAR): 激光扫描仪通过发射激光脉冲并接收反射回来的光来测量距离,从而构建环境的三维模型。这种传感器能够提供高精度的距离和形状信息,适用于需要精确空间感知的应用,如自动驾驶和地图构建。 深度相机: 深度相机能够捕捉场景的三维深度信息,通过红外传感器或结构光技术来测量物体的距离。这类传感器为机器人提供了更为直观的三维视觉能力,适用于需要精确空间定位和物体识别的应用。
力觉传感器
应变式力觉传感器: 基于应变片技术,能够测量弹性体在受力时产生的微小形变。这类传感器成本较低,适用于一般的力觉检测。 压电式力觉传感器: 利用压电材料在受力时产生的电荷变化来测量力的大小。这类传感器具有较高的灵敏度和响应速度,适用于动态力的测量。 电容式力觉传感器: 通过测量电容的变化来检测力的变化。这类传感器能够提供连续的力测量,适用于需要精确力控制的应用。

10月22-24日,2025大湾区国际具身智能机器人产业大会暨展览会将在广州空港博览中心盛大开幕,知名企业、前沿技术与创新成果技术齐聚一堂,开启智能机器人新时代的无限可能!现观众免费登记通道现已经开启,欢迎大家扫码登记预约参观:

4 特定功能传感器
接近觉传感器
超声波传感器: 通过发射超声波并接收其反射回来的声波来测量距离。这类传感器成本较低,但受环境影响较大,如空气流动和温度变化都可能影响其测量精度。在机器人设计中,超声波传感器通常用于短距离的避障和距离测量。 红外传感器: 利用红外光的反射原理来检测物体的存在和距离。红外传感器具有较高的响应速度和精度,但测量距离较短,且容易受到光照条件的影响。在机器人设计中,红外传感器常用于短距离的物体检测和定位。 激光传感器: 激光传感器通过发射激光束并接收其反射回来的光来测量距离。与超声波和红外传感器相比,激光传感器具有更高的精度和更远的测量范围。在机器人设计中,激光传感器常用于高精度的定位和地图构建。
滑觉传感器
电阻式滑觉传感器: 通过测量电阻的变化来检测物体的滑动。这类传感器成本较低,但灵敏度和分辨率有限,适用于基本的滑动检测。 电容式滑觉传感器: 利用电容的变化来检测物体的滑动和表面特性。电容式滑觉传感器具有较高的灵敏度和分辨率,能够提供多点触控信息,适用于需要精细操作的任务。 光学滑觉传感器: 利用光学原理,如光的折射或反射,来检测物体的滑动和表面特性。这类传感器能够提供高分辨率的滑觉图像,适用于对物体表面特性进行精细分析的应用。
听觉传感器
麦克风阵列: 通过多个麦克风的协同工作,实现对声源的定位和声音的清晰捕捉。麦克风阵列在机器人设计中常用于语音识别和声源定位,尤其是在需要区分多个声源或在嘈杂环境中进行声音捕捉的应用。 数字音频处理器: 这些处理器能够对捕捉到的声音信号进行数字化处理,提取特征信息,进行语音识别和声音分类。数字音频处理器在机器人设计中用于提高语音识别的准确性和鲁棒性。

5 传感器技术发展趋势
智能传感器
自校准与自诊断: 智能传感器具备自校准功能,能够自动补偿因温度、湿度等环境变化引起的误差,保证测量数据的准确性。自诊断功能则能够实时监测传感器自身的健康状况,预测潜在的故障,从而减少维护成本和避免意外停机。 无线通信能力: 随着物联网技术的发展,智能传感器越来越多地集成了无线通信模块,如Wi-Fi、蓝牙、ZigBee等,使得传感器数据可以远程传输和监控。这种无线连接能力极大地扩展了机器人的应用范围,使其能够在更广阔的空间内进行操作和监控。 人工智能集成: 智能传感器通过集成微处理器和人工智能算法,能够实现对采集数据的实时分析和决策。例如,通过机器学习算法,智能传感器可以识别不同的物体、预测设备维护需求,甚至在复杂环境中进行自主导航。 能效优化: 智能传感器在设计时考虑到能效问题,通过低功耗的微处理器和优化的算法,使得传感器在保证性能的同时,能够最大限度地减少能量消耗。这对于需要长时间运行的机器人系统尤为重要。
集成化与微型化
MEMS技术: 微机电系统(MEMS)技术使得传感器的微型化成为可能。MEMS传感器利用半导体制造工艺,在硅晶片上集成机械结构和电子电路,实现传感器的微型化和集成化。这种技术的应用使得传感器的尺寸大大缩小,同时提高了性能和可靠性。 多功能集成: 集成化传感器能够在同一芯片上集成多种敏感元件,实现对不同物理量的测量。例如,一个集成化传感器可以同时测量温度、湿度、压力和加速度,为机器人提供更全面的环境信息。 3D打印技术: 3D打印技术的发展为传感器的定制化和快速原型制造提供了新的可能性。通过3D打印,可以快速制造出复杂的传感器结构,实现传感器的个性化设计和定制化生产。 纳米技术: 纳米技术的应用使得传感器的微型化达到了新的水平。纳米材料的奇特性质,如高比表面积和量子尺寸效应,使得传感器的性能得到显著提升。同时,纳米技术也使得传感器的尺寸进一步缩小,为机器人的微型化和精密操作提供了支持。

6 传感器在机器人设计中的应用
环境感知
数据采集: 环境传感器如温湿度传感器、气体传感器等,能够实时监测周围环境的变化,为机器人提供必要的环境数据。例如,一项研究表明,使用温湿度传感器的机器人能更准确地进行环境控制,提高能效比达20%以上。 信号转换与处理: 视觉传感器通过摄像头捕捉图像信息,通过图像处理技术提取颜色、形状、纹理等特征信息,使机器人能够进行物体识别和场景理解。例如,一项实验中,使用高清摄像头的机器人在进行物体识别任务时,准确率比使用标准清晰度摄像头的机器人高出约15%。 输出控制: 力敏传感器可以帮助机器人感知施加在机械臂上的力量,实现精细的操作。例如,在一项装配任务中,使用力敏传感器的机器人能够自动调整施加力量,减少装配误差,提高产品质量。
任务规划与执行
任务规划: 在任务规划阶段,传感器数据被用于生成任务执行所需的动作序列。例如,使用激光雷达(LiDAR)的机器人能够生成环境地图,规划出避障路径,提高任务执行的效率和安全性。 执行监控: 在任务执行过程中,传感器提供实时反馈,使机器人能够监控任务进度并进行必要的调整。例如,一项研究中,使用触觉传感器的机器人在抓取任务中,能够根据接触力的变化调整抓取力度,减少物体滑落率。 动态调整: 在遇到意外情况时,传感器使机器人能够进行快速响应和动态调整。例如,使用视觉传感器的机器人在导航任务中,能够识别突然出现的障碍物,并实时调整路径,避免碰撞。PS:如果你喜欢这篇文章,请关注公众号“设计基石”。
安全与交互
碰撞避免: 力觉传感器和触觉传感器能够检测机器人与环境之间的接触力,用于实现精细操作和避免碰撞。例如,一项实验中,使用力觉传感器的机器人在进行人体交互任务时,能够自动减缓接触力度,降低碰撞风险。 交互反馈: 听觉传感器和视觉传感器使机器人能够更好地理解和响应人类的指令。例如,使用麦克风阵列和摄像头的机器人能够进行语音识别和手势识别,提高人机交互的自然性和效率。 安全监控: 环境传感器如气体传感器和温湿度传感器,能够监测潜在的环境风险,为机器人提供安全预警。例如,一项研究中,使用气体传感器的机器人能够在检测到可燃气体泄漏时,自动启动应急预案,减少事故发生的概率。
了解更多机器人行业前沿技术、趋势,推荐您关注:2025大湾区国际具身智能机器人产业大会暨展览会

一场聚焦未来、颠覆创新的机器人产业盛宴即将席卷大湾区!2025大湾区国际具身智能机器人产业大会暨展览会将于2025年10月22日-24日在广州空港博览中心盛大启幕,知名企业、前沿技术与创新成果技术齐聚一堂,开启智能机器人新时代的无限可能!
聚焦前沿,定义未来
展会深度聚焦“具身智能机器人”这一引领下一代产业变革的核心技术方向。从核心零部件与基础技术、具身智能机器人整机、软件与算法、场景应用与行业解决方案等,覆盖具身智能机器人全产业链,是洞悉趋势、把握未来的行业风向标。


精英汇聚,价值链接
现场预计将吸引数百家机器人企业、顶尖科研机构、核心零部件供应商及解决方案提供商参展,数万名来自制造、物流、医疗、服务、消费、投资等领域的专业买家、决策者、技术专家和投资人莅临。是您拓展高端人脉、达成深度合作、寻找战略投资的核心枢纽。




扫码报名免费观展

点击阅读原文,报名参加“2025大湾区国际具身智能机器人产业大会暨展览会”










