“ 这是一款开源、隐私友好型小型 GNSS 接收器,配有 ESP32 和 NFC,适用于所有基于位置的项目,包括跟踪监控摄像头。 ”



unsurv 离线版是一款基于 ESP32 的隐私友好型微型硬件平台(45mm x 32mm PCB),集成高精度 GNSS 接收器、加速度计及 NFC 功能。该设备通过板载传感器与 OpenStreetMap(OSM)离线地图数据协同工作,实现隐私安全的定位数据采集与分析。作为全开源项目,其最初设计目标为线下视频监控网络测绘,但可灵活扩展至多种定制场景。
视频监控网络可视化:设备通过读取 SD卡中预存的 OSM 摄像头坐标数据库,每日生成用户与监控摄像头的接触报告,全程无第三方位置数据泄露
- 动态 NFC 数据交互:支持通过智能手机(或符合 NFC Tag 4 标准的读取器)访问设备数据,外壳集成动态 NFC 标签实现便捷交互
- 智能功耗管理:采用 BMA400 微型加速度计实现敲击/双击识别功能,结合运动状态检测(步数统计、行走/跑步模式识别),动态调节设备功耗以延长续航

隐私反追踪设备核心功能
unsurv离线版专为数据自主监控而设计,实现"追踪那些追踪你的数据"理念。该设备支持多维度数据采集:
监控网络测绘
结合 OpenStreetMap 离线数据库,生成每日监控摄像头接触报告 自动记录潜在监控设备的地理位置与接触时间
通勤隐私记录
加密存储行程轨迹、平均移动速度等数据 支持自行车/步行通勤模式识别,数据仅限本地访问
无线信号测绘
绘制城市 WiFi 信号强度热力图 建立免费热点分布数据库
商业车辆管理
精确记录商业运输路线与时长 生成符合税务申报要求的行程凭证
设备预装四大基础功能模块,开发者可通过开源代码(GitHub仓库获取)快速构建以下应用:

功能参数
Ublox cam m8c GNSS 接收器(GPS、伽利略、格洛纳斯、北斗)
ESP32 Pico D4 微控制器
德州仪器 RF430CL330 动态 NFC 接口
用于省电功能的博世 BMA400 加速计
MCP73831 单节锂离子电池充电器
微型 SD 插槽
5 种数据访问方式:
NFC
蓝牙
WiFi
SD 卡
微型 USB
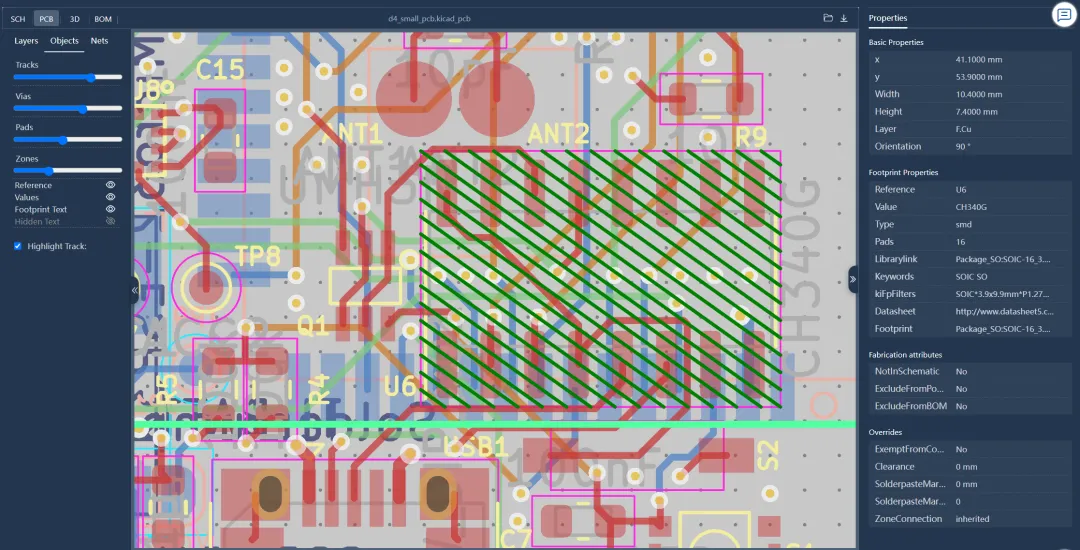
原理图 & PCB






仓库 & 下载
可以在Github中获取开源仓库:
https://github.com/unsurv/unsurv-offline

扫码加入资料分享群,定期分享硬件资料