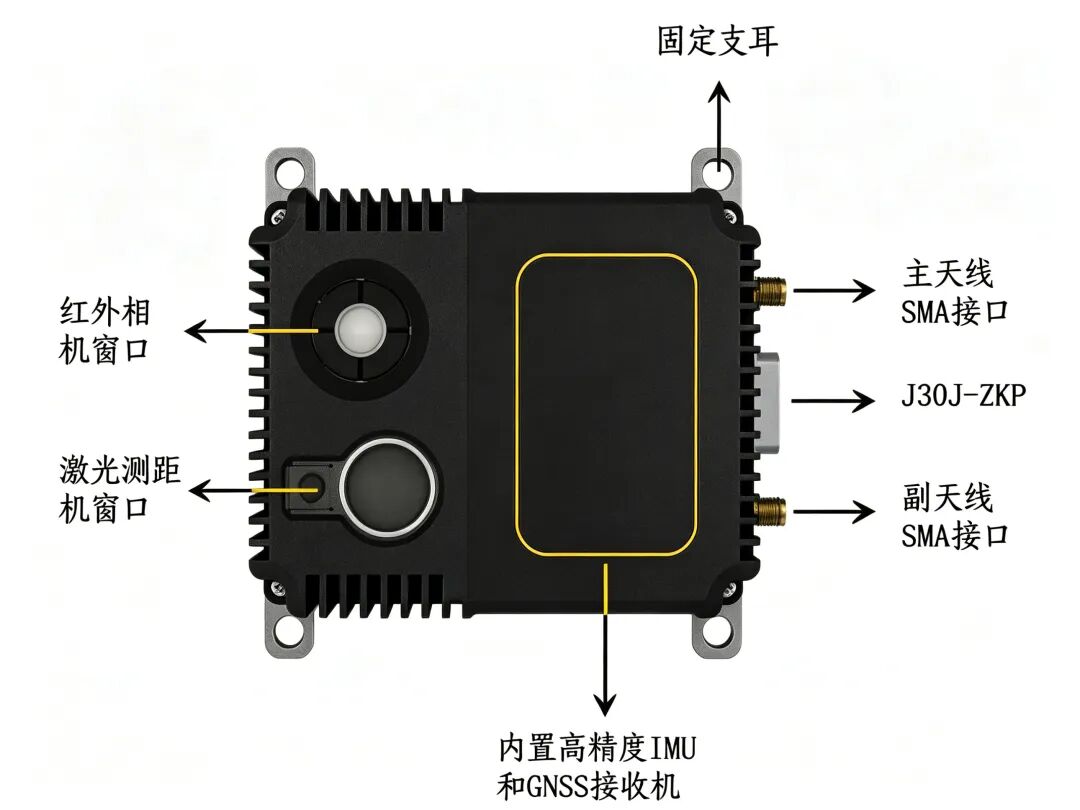
一、在复杂电磁环境、城市楼宇遮挡、野外深山作业时,无人机最怕的就是卫星信号丢了。一旦 GNSS 拒止、干扰、中断,飞机很容易失控、偏航、炸机。目前,民用无人机完全依靠惯导辅助的卫星导航,卫星导航一旦失效后 ,惯性导航系统往往不能确保导航安全而导致炸机。在抢险救灾工作中 ,由于地面设施毁坏和各种救援装备互相干扰,卫星导航信号也容易受到干扰而失效。图像自主组合导航系统凭借成本和精度优势,是目前最可靠的备份导航手段选项。二、下面是一套集成红外+激光+惯导+卫星的多源融合导航设备,适用于固定翼无人机、复合翼无人机及多旋翼无人机等多种飞行平台。核心能力一句话:卫星能用就用卫星;卫星没信号,自动切图像+惯导,全程不中断、不丢定位。
 产品组成表
产品组成表
供电:12~30V 宽压,典型 24V/15W;
接口:支持1路 RS232、1路RS422、1路UART TTL、1 路网口;
安装:减震支耳+M3螺丝,稳得很。
核心亮点:
三模导航,自动无缝切换。
卫星正常:GNSS+惯导组合,高精度定位;
卫星弱 / 断:自动切图像 + 惯导融合,持续输出位置、姿态、航向;
极端情况:支持纯惯性短时导航,关键时段不掉线。
三、VNS和VINS,看似只差一个字母,实则是纯视觉导航与视觉惯性融合导航的核心分水岭,直接决定设备在无光、弱纹理、高速运动场景下的定位稳定性。一句话总结:VNS是纯“靠眼睛”导航,VINS是“眼睛+惯性”一起上。
四、总结下:
1.核心区别:VNS=纯视觉(只有摄像头),适合室内、光线好、环境清晰的入门场景(室内航拍、简单巡检);VINS=视觉+IMU(摄像头+惯性测量单元),适合户外复杂环境、无GPS、快速运动场景(山区巡检、军用、高端测绘);2.实操感受:VNS易受光线、环境影响,偶尔飘移;VINS更稳、更靠谱,短暂遮挡也能正常工作,就是成本高、调试稍复杂。通俗类比:VNS像人闭着眼摸路,全靠手(摄像头)摸;VINS像人正常走路,眼睛(摄像头)看路,内耳(IMU)保持平衡,偶尔闭眼也能走几步。其实,两者没有好坏之分,就看需求和预算:入门级民用、简单室内导航,VNS够用;高端设备、复杂场景,必须上VINS,稳才是第一位的!
五、其实,VINS并不是一种新技术。只是随着技术进步,VINS成本下降,目前已经到达低成本产业化应用临界点。可以说,在高精度陀螺成本没有下降到足够低以前,VINS组合导航系统是卫导拒止环境条件下解决无人机导航问题的最佳方案。