点击下方卡片,关注「3D视觉工坊」公众号
选择星标,干货第一时间送达
来源:3D视觉工坊
星球内新增20多门3D视觉系统课程、入门环境配置教程、多场顶会直播、顶会论文最新解读、3D视觉算法源码、求职招聘等。想要入门3D视觉、做项目、搞科研,欢迎扫码加入!

0.这篇文章干了啥?
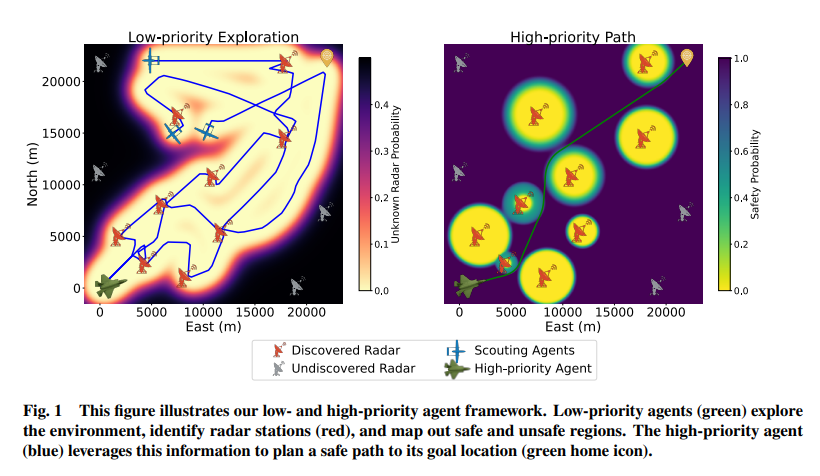
这篇文章提出了一种用于复杂对抗环境中异构无人机协同路径规划的框架,旨在提高无人机安全穿越敌对区域的概率。该框架包含两类无人机:低优先级无人机负责探索环境、定位威胁,高优先级无人机则利用低优先级无人机提供的信息,规划安全路径以抵达目标地点,同时降低被敌方雷达探测到的风险。
低优先级无人机路径规划:采用去中心化优化算法,目标函数包含三部分,分别是探索未知区域、减少雷达参数估计的不确定性以及引导无人机向高优先级无人机的目标方向探索。为避免多架无人机选择相同路径,算法根据无人机与不确定性最大的雷达的距离来确定规划优先级,依次选择航点并共享信息。 高优先级无人机路径规划:针对雷达参数已知和未知两种情况,分别提出了确定性和不确定性路径规划方法。两种方法都利用Voronoi图生成初始可行轨迹,再使用内点优化算法对B样条轨迹进行优化,以满足路径安全(雷达探测概率)和运动学可行性约束。在不确定性情况下,采用广义Voronoi图,并引入概率安全约束,确保路径在参数不确定时仍足够安全。 实验结果:通过模拟实验,验证了低优先级无人机路径规划算法在不同参数下的性能,并与“lawnmower”基线算法进行了比较,结果表明该算法能更有效地为高优先级无人机找到安全路径。同时,高优先级无人机路径规划算法在考虑雷达参数不确定性的情况下,也能有效保证路径安全,成功率与预期相符。 未来工作:未来研究将考虑无人机雷达散射截面随视角变化的情况,以进一步提高算法性能。
下面一起来阅读一下这项工作~
1. 论文信息
论文题目:Cooperative Multi-Agent Path Planning for Heterogeneous UAVs in Contested Environments 作者:Grant Stagg, Cameron K. Peterson 作者机构:Brigham Young University, Provo, Utah, 84602 论文链接:https://arxiv.org/abs/2509.02483
2. 摘要
本文通过引入一种协作式多智能体框架,解决了在对抗环境中无人机导航的挑战,提高了无人机安全穿越的可能性。该方法涉及两种类型的无人机:低优先级智能体用于探索和定位威胁,高优先级智能体则在尽量降低被敌方雷达系统探测到的风险的同时,安全地导航至目标目的地。低优先级智能体采用分散式优化算法,以平衡探索、雷达定位以及为高优先级智能体识别安全路径的任务。针对高优先级智能体,本文提出了两种路径规划方法:一种用于雷达参数确定的场景,使用加权Voronoi图;另一种用于雷达参数不确定的场景,利用广义Voronoi图(结合从雷达探测概率的不确定性中得出的非欧几里得准则)和概率约束。两种方法均采用优化技术来细化轨迹,同时考虑运动学约束和雷达探测概率。数值模拟证明了我们所提出框架的有效性。本研究通过结合异构多智能体协作、概率建模和优化,改进了无人机路径规划方法,提高了在对抗环境中任务的成功率。
3. 效果展示
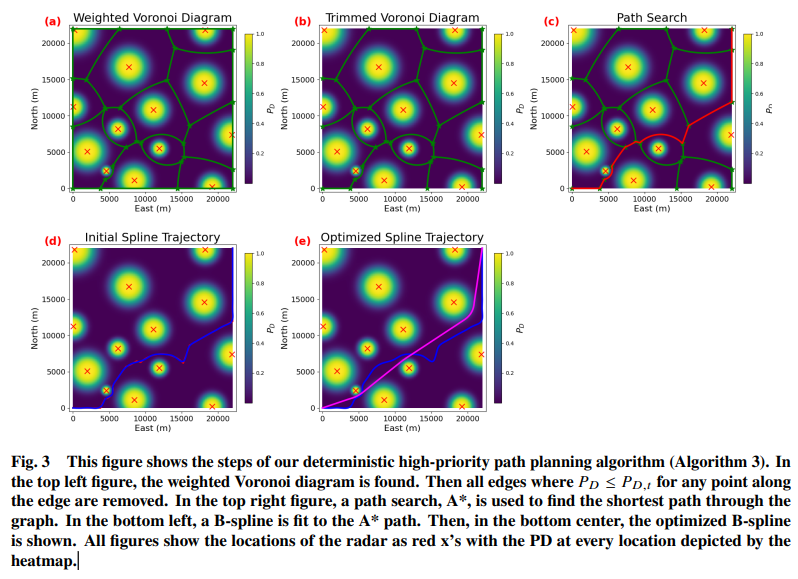
该图展示了我们确定性高优先级路径规划算法(算法3)的步骤。具体如下:
左上角图中,首先得到加权沃罗诺伊图(weighted Voronoi diagram)。随后,移除所有满足“沿边任意一点的检测概率(𝑃𝐷)≤ 目标检测概率(𝑃𝐷,𝑡)”的边。 右上角图中,采用A*路径搜索算法在图中寻找最短路径。 左下角图中,对A*路径进行B样条(B-spline)拟合。 底部中间图中,展示了经过优化后的B样条曲线。
所有图中,雷达位置均以红色“×”标记,而每个位置的检测概率(𝑃𝐷)则通过热力图(heatmap)呈现。
4. 主要贡献
文章的主要贡献总结如下:
低优先级代理的协同路径规划:我们开发了一种算法,该算法能最优地平衡区域探索和降低已检测到的雷达位置的不确定性。 已知雷达参数的路径规划:利用加权Voronoi图,我们设计了一种路径规划算法,当雷达参数完全已知时,该算法能最小化雷达检测风险。 雷达参数不确定的路径规划:针对雷达参数不确定的场景,我们引入了一种基于广义Voronoi图的路径规划算法,以提高高价值无人机的隐身性和生存能力。
5. 基本原理是啥?
合作式多智能体框架引入包含两种类型无人机(UAV)的合作式多智能体框架来应对无人机在对抗环境中的导航挑战。低优先级智能体负责探索和定位威胁,高优先级智能体在最小化被敌方雷达系统探测风险的同时安全导航至目标目的地。 低优先级智能体路径规划算法
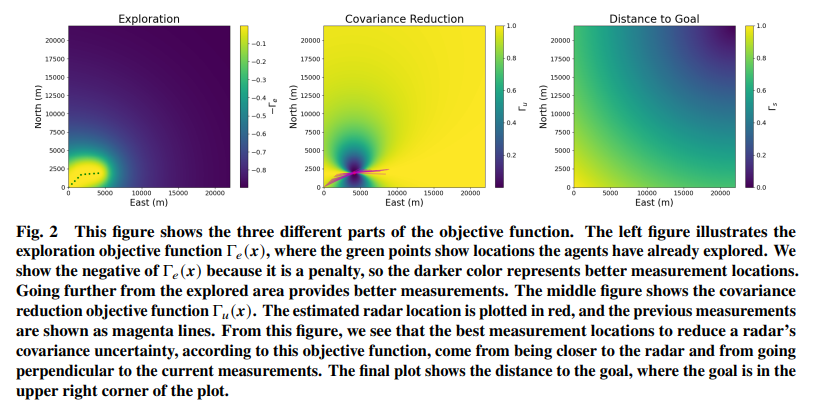
目标函数:采用三部分目标函数。一是通过贝叶斯方法激励智能体探索未探索区域,利用已访问位置信息近似未发现雷达存在的概率,引导智能体前往概率高的位置;二是引导智能体前往能减少雷达参数协方差矩阵行列式的区域,提高雷达参数估计精度;三是激励低优先级智能体朝着高优先级智能体的目标方向探索,目标是到高优先级目标的归一化距离。整体目标函数是这三部分的加权和。 多智能体优化:每个低优先级智能体独立选择最优航点并朝其移动。航点选择根据智能体与不确定性最大的雷达的接近程度进行优先级排序,避免智能体聚集在相同的高回报位置。优化过程在智能体到达当前航点或固定时间间隔后触发,依次选择航点并共享信息。
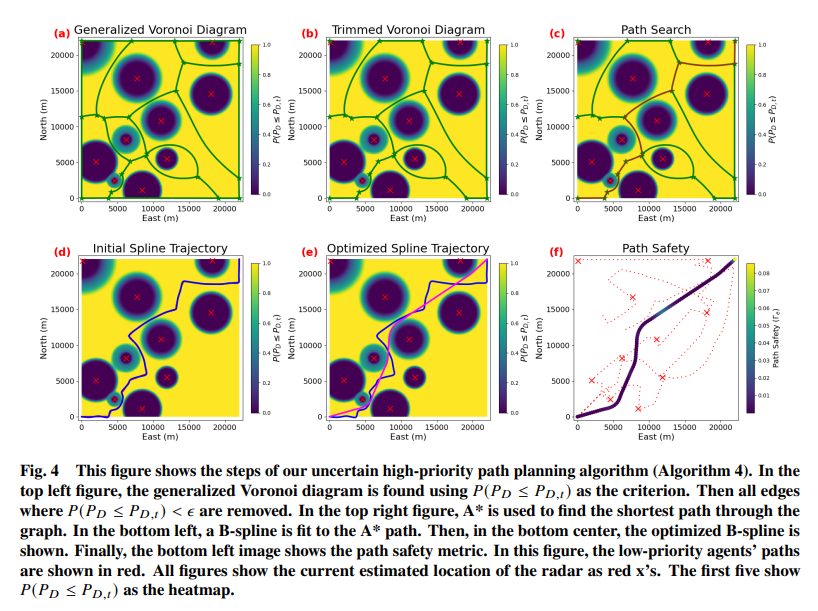
确定性情况:假设高优先级智能体知晓所有雷达参数,使用乘性加权Voronoi图和A图搜索算法找到初始可行轨迹。将雷达位置作为生成点,根据特定公式计算雷达权重,构建乘性加权Voronoi图。去除最大探测概率(PD)超过阈值的边,使用A算法找到最短路径,拟合B样条轨迹并检查速度约束,最后使用内点优化算法优化轨迹,以满足路径安全和运动学可行性约束。 不确定情况:当雷达参数不确定时,构建基于PD低于阈值概率的广义Voronoi图。每个点分配给最可能违反安全约束的雷达系统,定义边界。去除PD低于阈值概率小于指定置信水平的边,使用A*算法找到最短路径,同样使用B样条优化框架,但使用概率约束替代确定性约束。最后测试路径是否可能存在未发现的雷达站,若概率低于阈值则派遣高优先级智能体。
6. 实验结果
文章对低优先级和高优先级无人机路径规划算法进行了仿真实验,结果如下:
低优先级路径规划算法参数权重影响
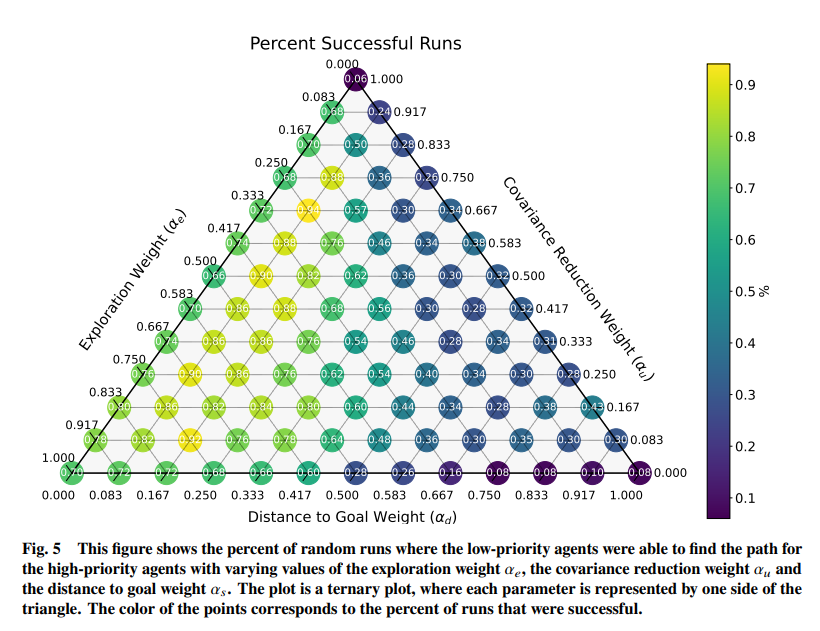
成功率:通过对低优先级路径规划算法目标函数的三个权重参数(、、)进行不同组合的测试,发现参数需要平衡。在单一权重占主导的角落,成功率较低。当、、时,低优先级代理在94%的随机运行中能够为高优先级代理找到路径。推荐课程:。 平均寻路时间:增加距离目标权重会减少找到路径的平均时间,但成功运行的百分比会降低。
成功率:使用所提出的路径规划器,低优先级代理在94%的随机运行中能够找到高优先级路径;而“割草机”路径规划器的低优先级代理在86%的运行中能够找到高优先级路径。 寻路时间:“割草机”路径规划器每次运行找到路径的时间大致相同,由代理完成覆盖路径的时间决定;所提出的算法寻路时间分布更广,因为其性能取决于雷达布局,且在除一种情况外的所有情况下都能更快地找到高优先级路径。
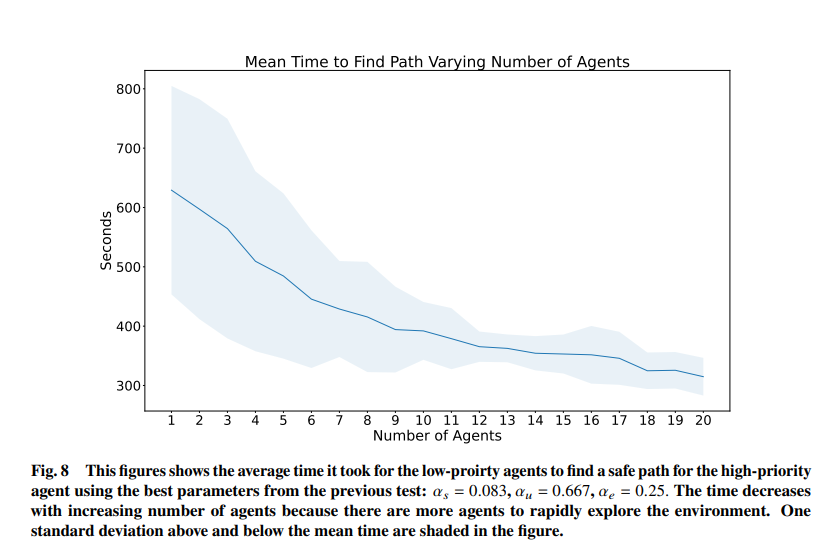
平均最大地面真实检测概率:在20个低优先级代理且参数为、、的运行中,对50条规划路径的地面真实检测概率进行评估,计算出平均最大地面真实检测概率为11.59%,低于算法中使用的15%阈值。 成功率:最大地面真实检测概率在3种情况下高于15%阈值,即概率阈值的成功率为94%。使用90%的阈值,若检测概率的线性化准确,预计概率阈值在约90%的情况下有效,实验结果符合预期,说明了该方法在寻找概率安全路径方面的有效性。

7. 总结 & 未来工作
总结
本文提出了三种用于在敌方对抗环境中运行的概率路径规划算法,利用了一种风险感知框架,涉及低成本侦察无人机和承担关键任务的高优先级无人机。敌方环境以敌方雷达为特征,并对雷达的探测概率进行了建模。假设低优先级无人机可以截获敌方雷达信号,并根据截获的信号估计敌方雷达的参数。低优先级无人机的任务是探索环境,为高优先级无人机找到一条安全的路径。
为低优先级无人机开发了一种分布式路径规划算法,该算法规划路径以定位未知的敌方雷达站,并访问信息丰富的测量位置,以减少雷达参数估计的不确定性。通过仿真结果将该方法与“割草机”基线方法进行了比较,证明了其性能更优。
还为高优先级无人机提出了两种算法:一种适用于雷达参数已知的确定性情况,另一种适用于雷达参数需要推断的不确定情况。这两种方法都依赖于Voronoi图和A*算法来生成一条穿过雷达区域的初始可行轨迹,然后使用内点优化算法对其进行优化,同时考虑运动学可行性和探测概率约束。仿真结果表明,该算法在考虑雷达参数不确定性的情况下,能够有效保障路径安全。
未来展望
未来的工作包括考虑无人机雷达散射截面(RCS)随视角变化的情况。在本文中,假设所有视角下的RCS是恒定的。可以通过在选择初始轨迹时使用最大RCS,并允许优化算法调整无人机的方向,以利用真实的RCS变化来提高性能。
3D视觉硬件,官网:www.3dcver.com

3D视觉学习圈子
星球内新增20多门3D视觉系统课程、入门环境配置教程、多场顶会直播、顶会论文最新解读、3D视觉算法源码、求职招聘等。想要入门3D视觉、做项目、搞科研,欢迎扫码加入!

3D视觉全栈学习课程:www.3dcver.com

3D视觉交流群成立啦,微信:cv3d001











