点击下方卡片,关注「3D视觉工坊」公众号
选择星标,干货第一时间送达
来源:CVer
星球内新增20多门3D视觉系统课程、入门环境配置教程、多场顶会直播、顶会论文最新解读、3D视觉算法源码、求职招聘等。想要入门3D视觉、做项目、搞科研,欢迎扫码加入!

点击下方卡片,关注「3D视觉工坊」公众号
选择星标,干货第一时间送达
来源:CVer
星球内新增20多门3D视觉系统课程、入门环境配置教程、多场顶会直播、顶会论文最新解读、3D视觉算法源码、求职招聘等。想要入门3D视觉、做项目、搞科研,欢迎扫码加入!

在计算机视觉与图形学中,表面重建是一个长期未解的难题:给定一组多视角图像,能否重建出高精度、几何清晰、细节丰富的 3D 模型?
近年来,NeRF、SDF与 3D Gaussian Splatting (3DGS) 等方法大放异彩,让 AI 能从图像中恢复出三维世界。但问题也随之浮现:
初始化依赖:3DGS 高效,但强烈依赖高精度和覆盖度的点云初始化,点云缺陷会直接传递为几何误差与细节缺失。
模糊边界:高斯基元天生边界并不锐利,难以保证几何表面的清晰性与一致性。
外部先验难以融合:单目深度、法线等外部几何线索虽有帮助,但若不加选择地引入,往往放大噪声,破坏原本准确的几何。
于是一个问题被抛出:有没有一条新路径,不依赖复杂初始化,也能在保持效率的同时,实现真正精确、完整的表面重建?
北京航空航天大学、Rawmantic AI、虚拟现实新技术国家重点实验室、麦考瑞大学、RIKEN AIP 与东京大学的团队给出了他们的答案:
GeoSVR (Geometric Sparse Voxel Reconstruction) —— 一种全新的显式几何优化框架,探究稀疏体素的潜力,在几何准确性、细节捕捉和完整性上全面超越现有方法。该论文目前已被NeurIPS 2025接收为Spotlight。

论文:https://arxiv.org/abs/2509.18090
主页:fictionarry.github.io/GeoSVR-project/
代码:github.com/Fictionarry/GeoSVR
方法核心:驯服稀疏体素的两大设计

图1 GeoSVR方法流程
GeoSVR 在稀疏体素表达SVRaster的基础上,围绕几何约束与表面正则化提出了系统化设计,使体素能够在保证效率的同时,生成几何精确的表面。
1. 体素不确定性深度约束 (Voxel-Uncertainty Depth Constraint)
挑战:稀疏体素在没有几何先验时,容易出现局部表面错误;而外部深度信号(如单目深度估计)又往往带有噪声,若直接施加监督,可能导致几何结构进一步劣化。
核心思路:GeoSVR 在引入深度约束之前,首先对具有清晰几何意义和三维边界的体素进行几何可靠性建模。即:先估计体素的不确定性,再决定监督强度。
不确定性建模:受不确定性和体素层级的紧密耦合的启发,GeoSVR抽象出一种层级感知的几何不确定性,其与体素八叉树的层级明确相关,表明具有关键几何形状的低层级体素会导致更高的不确定性。
深度约束加权:将外部深度损失与不确定性结合
效果:在几何歧义处借助外部信号校正,而在可信区域保持体素自身学习,避免过拟合噪声。
优势:外部几何约束得以“选择性注入”,显著提升了鲁棒性与精确性。

图2 体素不确定性深度约束效果
2. 稀疏体素表面正则化 (Sparse Voxel Surface Regularization)
·挑战:稀疏体素的表达天然是离散的,每个体素只作用于局部区域。如果缺乏约束,容易导致:
局部过拟合,产生碎片化表面;
渲染表面与真实几何不对齐,形成不准确的表面;
大型体素主导几何表达几何,带来失真。
·解决方案:GeoSVR 提出了三种互补的正则化策略:
(a) 体素暂退
·随机丢弃一部分体素,仅保留子集参与训练。
·迫使模型利用更少的体素保持全局一致性,从而减少局部冗余,避免陷入碎片几何。
(b) 表面修正
·在渲染过程中显式检测射线与体素交界点,强制渲染表面与体素密度边界对齐。
·相当于将几何表面锚定在体素分布之上,从而得到更锐利的几何边缘。

图3 表面修正说明及效果
(c) 体素尺度惩罚
·为体素尺度引入正则项,抑制过大体素对几何的错误主导。
·使几何表达更加细粒度,避免大体素占据并“抹平”局部结构。
优势:通过全局一致性约束、边界校正与尺度控制,GeoSVR 有效提升了几何的锐度与稳定性。
实验结果:精准、完整、高效
GeoSVR 在多项权威数据集上全面超越现有方法:
1. DTU 数据集
Chamfer 距离全场最佳,几何精度领先;
训练仅需 0.8 小时,远快于先前SOTA方法Geo-NeuS等隐式方法的 >12 小时。

2. Tanks and Temples数据集
GeoSVR 以 0.56 的 F1-score 成为目前最高精度方法;
在复杂建筑与低纹理区域保持稳定重建。


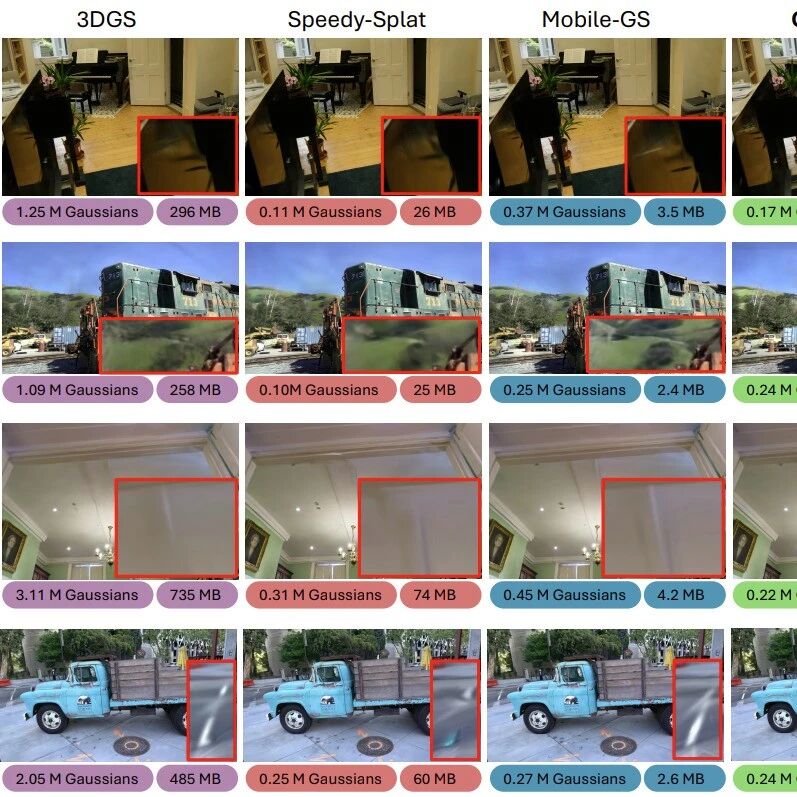
3. Mip-NeRF 360数据集
在新视角合成上保持与 3DGS 相当的高保真度;
同时提供更精确的几何结构。

实验表明,GeoSVR取得的重建效果:
更准:几何精度显著提升;
更全:细节与完整性优于现有方法;
更快:效率媲美 3DGS,远超隐式表达系列的工作。
意义与展望
GeoSVR 展示了一个新的可能,在SDF与3DGS以外,稀疏体素也能支撑高质量表面重建,并通过显式不确定性约束建模与正则化设计,兼顾精度、完整性与效率。这一技术为 机器人感知、自动驾驶、数字孪生、虚拟现实 等应用提供了三维环境构建及数字资产支持。未来,进一步增强全局一致性与跨场景泛化能力,将是该方向的重要研究路径。
3D视觉硬件,官网:www.3dcver.com

3D视觉学习圈子
星球内新增20多门3D视觉系统课程、入门环境配置教程、多场顶会直播、顶会论文最新解读、3D视觉算法源码、求职招聘等。想要入门3D视觉、做项目、搞科研,欢迎扫码加入!

3D视觉全栈学习课程:www.3dcver.com

3D视觉交流群成立啦,微信:cv3d001