
近日Nature报道了西湖大学工学院赵世钰实验室在该领域实现的突破,他们研发了名为FlyingToolbox(飞行工具箱)的空中协同操作系统,在国际上首次完成了多架旋翼无人机的空中工具交换,实现了“叠式”飞行状态下的高精度协同作业,成功解决了近距离飞行与高精度操作不可兼得的关键技术难题。
中国指挥与控制学会集群智能与协同控制专委会委员、西湖大学赵世钰教授及其团队,长期致力于智能无人系统研究。这是中国在多旋翼无人机领域的研究成果首次登上Nature。当无人机从“单兵作战”迈向“群体协作”,这些空中作业机器人将在更高更远的应用场景中,进行人类难以完成的任务。
空中作业机器人是一类将多旋翼无人机和高自由度机械臂相结合的新型机器人。
现在我们所见到的无人机,多为“飞行的摄像机”,常用于航拍、监测等任务。而空中作业机器人是“飞行的操作手”:它能代替人类在难以抵达的区域进行作业,进行危险物品抓取与放置、高空建筑清洁、接触式检修、空中增材制造等作业任务。
不过,单个空中机器人能携带的载荷有限,难以单独完成复杂的空中作业任务。赵世钰团队设想,能否像外科手术那样,主刀医生专注操作,护士在一旁将剪刀、镊子、止血钳等递给医生,空中机器人们也可以各司其职,交换工具。这样,每个单一功能的空中机器人,随时都可以变成“多面手”,通过分工协作完成各种复杂任务。
但理想很丰满,现实很骨感。
考虑到多旋翼无人机布局的特点,如果两个无人机要交换有效载荷,需要采取“叠飞”的形式,即一架无人机先飞到另一架无人机的上方,再交换工具。
然而,当一架无人机飞在另一架正上方时,它的螺旋桨会向下持续地吹出强烈气流,专业术语叫“下洗气流”,会严重干扰无人机的稳定性。
实验显示,当两架无人机垂直距离接近至 0.6 米时,会产生达 13.18 米/秒的强烈下洗气流,相当于气象学上的6级“强风”(人在风中撑伞有困难)。因此,在现有的空中着陆、空中悬挂和集群飞行等研究中,“叠飞”虽也有出现,但通常飞行时长短暂,也未涉及精确空中操作。

这是一套空中协同操作系统,由一架工具箱无人机和一架操作无人机组成。
工具箱无人机,顾名思义,能够携带多种不同类型的末端执行工具,如爪子、剪刀等,你可以想象为护士手里那个装满各种手术器械的托盘。
而操作无人机,则是拥有可伸展的机械臂的那个“操作手”,你可以想象为主刀医生。

赵世钰实验室的目标是:工作时,操作无人机飞到工具箱无人机上方,能够像医生那样,手脚灵活地拾取各种工具,完成任务后放回原地,再换一个工具接着手术。全程两机配合默契,无需人为操控。

这其中,最大的挑战是必须克服竖叠式飞行时的下洗气流,在强风中实现高精度空中对接。根据测算,要确保无人机对接成功,机械臂底部与工具顶部之间的水平位移必须小于 1.5 厘米;也就是上方无人机的底端与下方工具的顶端之间偏移不能超过一指半的距离。
研究团队设计了三个“黑科技”核心模块以破解难题:柔性电磁对接机构、气流扰动估计与补偿方法、高精度对接与操作控制技术。
柔性电磁对接机构。这是一个在接触时会自动“吸附”的电磁智能接口,大大提升了对接的精准度。在操作无人机的机械臂末端,设计了一个内部带着铁片的空腔装置;工具箱无人机的上侧,有四个环形的柔顺圆锥电磁对接装置,它们下方都可以按需装配不同的操作工具(如剪刀、爪子等),顶部则是带有电磁铁的锥体(见图4)。
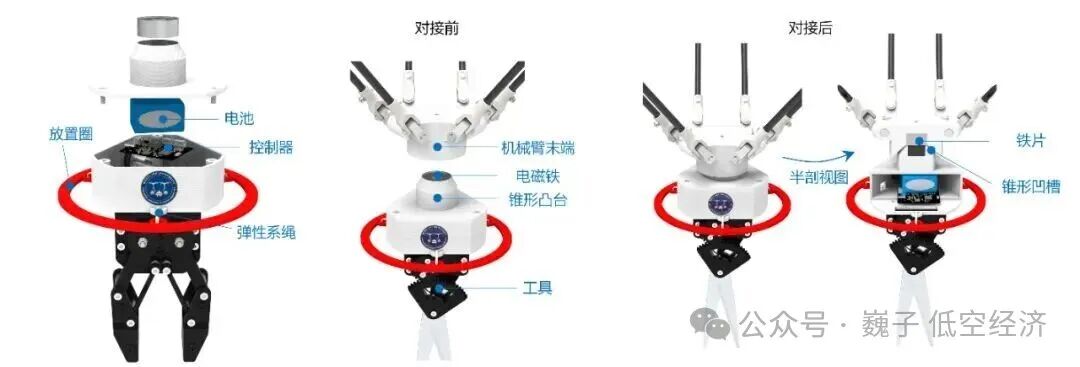
当工具箱无人机收到操作无人机发出的对接信号,它顶部的电磁芯片就会通电、产生磁力,就能与后者的锥形凹槽借由磁力吸附;并且,由于柔顺圆锥电磁对接装置是用数条橡胶材质的弹性系绳连接着安装环,装在工具箱无人机顶部的,具有“弹性”(即柔顺性,可想像为一个迷你的蹦床),即便两台无人机接上时有稍许的姿态偏移,也能保证对接成功。
气流扰动估计与补偿方法。在下方无人机的电脑中,预先植入了一个下洗气流速度场模型,它融合了空气动力学原理与真实速度传感数据,可以实时预测操作无人机下方任意位置的气流速度。有了气流速度,结合两台无人机的相对距离,就能利用神经网络估计出上方无人机所产生的气流对下方无人机的影响,进一步对下方无人机的飞行作出调整。
高精度对接与操作控制技术。在操作无人机上搭载着相机,在工具箱无人机的顶部贴着十多个带有不同信息的二维码,当上方的无人机“看”到一定数量的二维码,就能判断这一刻两机的相对距离,从而移动。下方无人机根据上方气流的情况,实时调整本机6个旋翼的旋转速度,从而抵消下洗气流的影响,实现精准的位置控制(确保无人机“在原位”)和姿态控制(确保无人机“不歪斜”)。
来源|巍子低空经济
☟☟☟
☝
精选报告推荐:
11份清华大学的DeepSeek教程,全都给你打包好了,直接领取:
10份北京大学的DeepSeek教程
8份浙江大学的DeepSeek专题系列教程
4份51CTO的《DeepSeek入门宝典》
5份厦门大学的DeepSeek教程
10份浙江大学的DeepSeek公开课第二季专题系列教程
6份浙江大学的DeepSeek公开课第三季专题系列教程
人工智能产业链联盟高端社区

免责声明:部分文章和信息来源于互联网,不代表本订阅号赞同其观点和对其真实性负责。如转载内容涉及版权等问题,请立即与小编联系(微信号:913572853),我们将迅速采取适当的措施。本订阅号原创内容,转载需授权,并注明作者和出处。如需投稿请与小助理联系(微信号:AI480908961)
编辑:Zero













