瘫痪患者重新行走,不再是遥不可及的梦想。
来自瑞士洛桑联邦理工学院(EPFL)的研究团队,在国际顶级期刊Science Robotics上发表重磅成果:通过将脊髓电刺激技术与康复机器人相结合,成功帮助多名瘫痪患者恢复了行走能力。

这项研究的核心创新在于开发了一套可植入的闭环脊髓神经假体系统,能够与各种康复机器人无缝对接,在患者进行机器人辅助行走和骑行训练时,精准激活其神经肌肉系统。
更令人振奋的是,经过这种增强型康复训练后,即使关闭电刺激,患者的神经功能仍能持续改善。这意味着该技术不仅能暂时恢复运动功能,还能促进神经系统的长期重塑。

▍康复机器人遇到的瓶颈
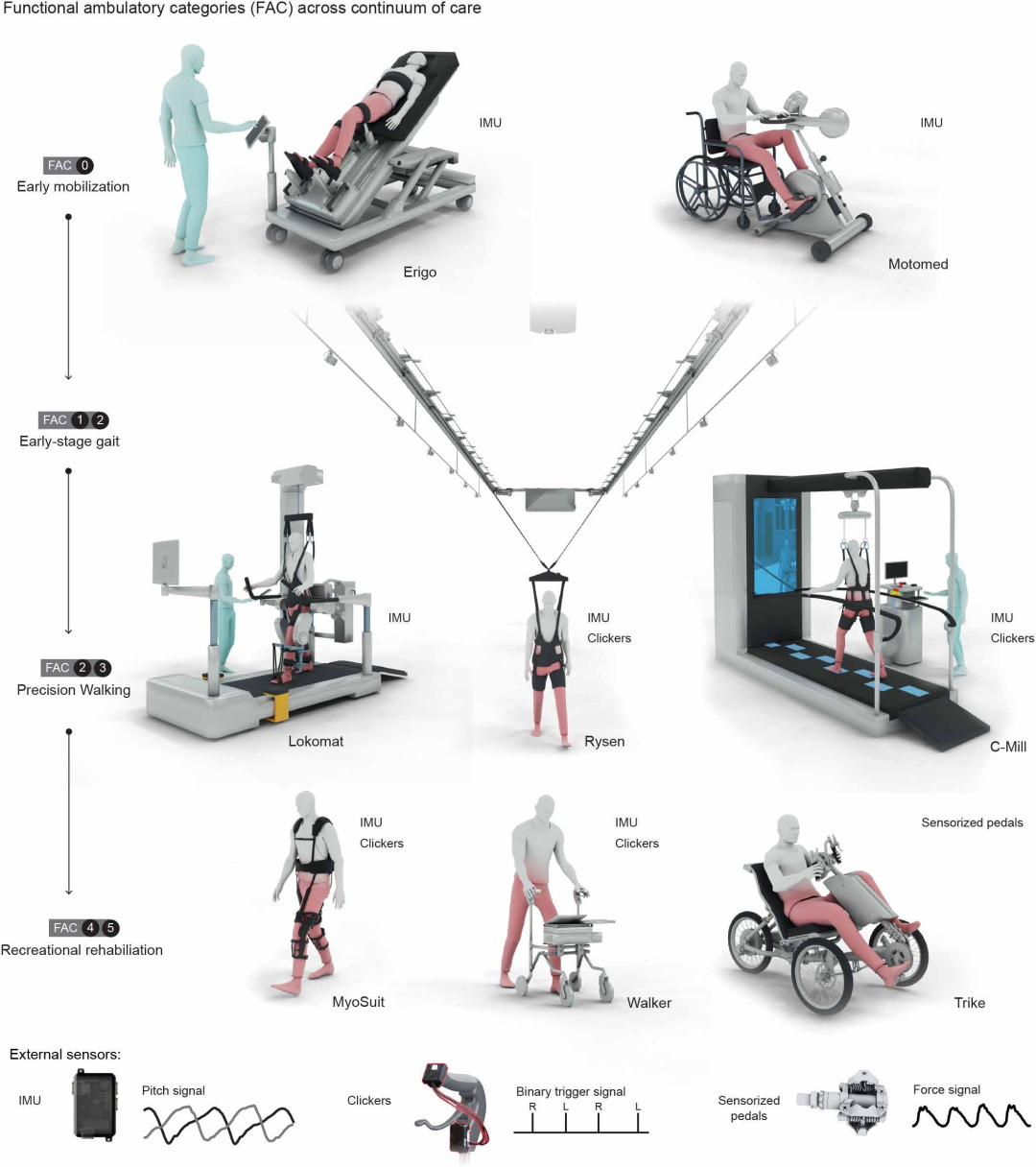
康复机器人技术在过去几十年取得了长足进展,从Lokomat外骨骼到多方向重力辅助系统,各种设备层出不穷。然而,这些先进设备在实际应用中却遇到了一个根本性难题:瘫痪患者无法产生足够的肌肉活动。
研究团队指出,步态康复的核心机制是促进神经系统的活动依赖性重组。这需要神经肌肉系统的强烈、协调和重复激活。但对于脊髓损伤导致瘫痪的患者来说,即使在机器人的帮助下进行被动运动,其肌肉活动仍然非常微弱。
传统的解决方案是功能性电刺激(FES),直接刺激肌肉。但这种方法存在诸多局限:电极放置繁琐、肌肉容易疲劳、刺激模式单一。更重要的是,FES无法真正模拟自然的神经控制模式。
瑞士团队提出的方案别出心裁:不直接刺激肌肉,而是通过硬膜外电刺激(EES)激活脊髓中的运动神经元。这种方法通过刺激大直径传入纤维,间接激活运动神经元,从而产生更自然、更协调的肌肉活动模式。
据团队介绍,其开发的系统能够根据不同的康复机器人和运动模式,实时调整刺激参数,真正实现了'活动依赖性仿生电刺激'。
▍闭环控制系统的精妙设计
要实现脊髓电刺激与康复机器人的完美配合,关键在于开发一套灵活而精准的闭环控制系统。研究团队为此设计了多个硬件和软件组件:
首先是植入式脉冲发生器和电极阵列。研究人员使用了包含16个电极的桨式导线,可以精确定位到控制下肢肌肉的脊髓节段。通过个性化的计算模型和术中电生理测试,确保每个电极都能准确激活目标肌群。
其次是实时控制平台。团队开发了一款平板电脑应用程序,可以根据外部传感器信号实时调整刺激参数。这个系统的延迟仅为134±26毫秒,完全满足运动控制的时间要求。
最巧妙的是多模态传感方案。针对不同的康复设备,研究人员设计了三种传感模式:
惯性测量单元(IMU)用于检测肢体运动。通过安装在小腿上的IMU,系统可以精确识别步态周期中的关键事件,如脚离地、摆动中期等。算法还能自动补偿传感器漂移,确保长时间使用的准确性。
人体工学按钮让患者能够主动触发刺激。这些特制的按钮可以安装在助行器、拐杖等设备上,患者通过简单的按压就能控制左右腿的摆动。
力传感踏板用于自行车训练。安装在曲柄上的传感器不仅能检测踩踏相位,还能测量施加的力量。系统据此实时调整刺激强度,实现上下肢的协调配合。

▍从实验室到户外:全方位验证效果
研究团队在5名脊髓损伤患者身上测试了这套系统,包括部分瘫痪和完全瘫痪的患者。实验涵盖了从卧床康复到户外活动的全过程。
在Lokomat外骨骼测试中,原本只能产生微弱肌肉活动的患者,在开启电刺激后肌肉活动显著增强。更重要的是,肌肉激活的时序也得到改善,更接近正常步态模式。患者与机器人的交互力明显降低,说明他们开始主动参与运动,而不是完全依赖机器带动。
在MOTOmed康复自行车上,电刺激使原本完全被动的下肢运动变成了主动参与。与传统的肌肉电刺激相比,脊髓电刺激的一大优势是不会导致肌肉疲劳。一名患者在20-30转/分钟的速度下持续骑行1小时,肌肉活动始终保持稳定。
最令人惊喜的是户外活动测试。配合智能助行器,患者能够在草地、砾石路甚至雪地上行走。通过在拐杖上安装双按钮,患者甚至能够独立上下楼梯。一名部分瘫痪的患者参加了慈善长跑活动,在4小时内完成了4069步。
在Go-Tryke卧式三轮车测试中,系统展现了更智能的控制能力。通过检测双臂施加的力量,刺激强度会自动调节。当骑行上坡或想要加速时,系统会感知到上肢用力增加,相应地增强下肢刺激,实现自然的运动协调。

▍康复效果超出预期
最关键的问题是:这种训练方法能否带来持久的康复效果?
研究团队对4名慢性脊髓损伤患者进行了长期跟踪。这些患者在参与研究前都接受过传统的机器人辅助康复训练,但神经功能没有任何改善,其中大部分人的下肢运动评分为零。
经过数月的电刺激增强型机器人康复训练后,所有4名患者的下肢运动评分都有所提高,即使在关闭电刺激的情况下也是如此。这表明训练促进了神经系统的重塑,产生了真正的康复效果。

更有意义的是,随着康复进展,患者对机器人辅助的依赖逐渐降低。最初完全依赖机器人支撑的患者,最终能够仅凭电刺激和助行器独立行走。
一个典型案例是,一名完全瘫痪的患者(P5)在训练初期需要78%的体重支撑才能在Lokomat中行走。经过电刺激增强训练后,所需的体重支撑降至51%。最终,他能够在没有机器人辅助的情况下,仅靠电刺激和助行器行走。
研究还发现了一个有趣的现象:单独使用机器人或电刺激都不足以支持早期康复。机器人提供了安全的训练环境和必要的物理支撑,而电刺激激活了神经肌肉系统。两者的结合产生了"1+1>2"的效果。
这项技术的优势之处在于,它不需要改造现有的康复设备。理疗师经过简单培训就能配置和使用系统。团队的目标是让这项技术能够在全球康复中心推广应用。
当然,研究团队也指出了当前系统的局限性。现有的神经刺激器是改装自深部脑刺激设备,并非专门为脊髓刺激设计。未来需要开发专用的硬件平台,支持更复杂的刺激模式。此外,这项概念验证研究的样本量较小,需要更大规模的临床试验来验证效果。
尽管如此,这项研究无疑为脊髓损伤患者的康复开辟了新的道路。通过巧妙地结合两种成熟技术,研究人员创造出了全新的治疗范式。随着技术的不断完善和推广,相信会有更多瘫痪患者重获行走的能力,回归正常生活。
论文地址:
https://www.science.org/doi/10.1126/scirobotics.adn5564










