点击蓝字
关注要点纵航 Subscribe for More


欢迎加入要点纵航eVTOL交流群,请添加文末工作人员微信!
背景
随着城市空中交通(UAM)、应急救援、偏远地区运输等场景需求的快速增长,垂直起降(Vertical Take-Off and Landing, VTOL)飞机因无需专用跑道的优势,成为航空领域的研发重点。然而,VTOL飞机的动力系统面临“续航能力”与“功率需求”的双重挑战:纯电动系统依赖大容量电池,存在续航短、载重受限的问题;纯燃油系统虽续航长,但在起飞/降落等大功率工况下燃油效率低,且巡航阶段易偏离最优能耗区间。
为平衡续航、功率与效率,混合动力推进系统成为VTOL飞机的核心技术方向。本文提出了一种针对VTOL飞机的不对称混合动力推进系统,旨在通过多能量分支、不对称功率配置及灵活储能设计,解决现有VTOL动力系统的效率与可靠性痛点,为多旋翼VTOL飞机提供兼具通用性与经济性的动力方案。

当前技术存在的问题
当前VTOL飞机混合动力技术以“单涡轮发电机+电池”的架构为主,典型代表为法国本文FR3056555公开的系统——该系统包含1台涡轮发动机、1台关联发电机(涡轮发电机)、1组电池及8台驱动对转螺旋桨的电动机,涡轮发电机与电池需分别满足飞机“持续30分钟”与“短时几分钟”的全功率推进需求。然而,该架构在实际应用中存在四大核心问题,难以适配VTOL飞机的复杂工况需求。
第一,燃油效率偏低,巡航阶段偏离最优能耗区间。VTOL飞机的功率需求存在显著工况差异:起飞/降落阶段需最大功率以提供足够升力,而巡航阶段功率需求仅为起飞功率的60%-70%。现有单涡轮发电机架构中,涡轮发电机需按“最大起飞功率”设计,导致巡航阶段涡轮发电机长期处于低负载运行状态,远离其“特定燃油消耗(SFC)最优区间”,造成燃油浪费,运行成本居高不下。
第二,性能稳定性差,受环境与载重影响显著。现有系统的动力输出高度依赖外部条件:当环境温度升高、海拔增加时,空气密度下降,涡轮发电机的功率输出会自然衰减;同时,飞机载重(乘客数量、货运重量)的变化会直接改变推进系统的负载需求,但单涡轮发电机的功率调节范围有限,难以动态适配这些变量,易出现“高载重时功率不足”或“轻载重时能耗过剩”的问题,影响飞行安全性与稳定性。
第三,电池质量冗余大,挤占有效载重空间。为应对涡轮发电机失效的应急场景,现有系统的电池需具备“短时全功率供电”能力,导致电池容量与质量过大(本文提及“需搭载大量电池”)。以典型VTOL飞机为例,若起飞功率需求为500kW,电池需至少满足3-5分钟的500kW功率输出,对应的电池质量可达数百公斤,大幅挤占乘客或货运的有效载重空间,降低飞机的实用价值。
第四,应急能力不足,无法覆盖复杂场景。现有系统在涡轮发电机完全失效时,仅能依赖电池进行“有限时间的应急降落”,续航时间通常不超过5分钟。这一设计无法覆盖海上、山区等“无紧急降落点”的场景——例如,当飞机执行海上救援任务时,若涡轮发电机失效,电池的短时供电仅能支持飞机维持姿态,无法为飞行员争取足够时间寻找安全降落区域,存在严重安全隐患。

本文的解决方案
本文提出的VTOL飞机混合动力推进系统,通过“不对称双能量分支+灵活储能配置+智能电力分配”的核心设计,全面解决现有技术痛点。该系统的核心架构包含四大组件:至少两个不对称能量分支、多个电动推进器、1个电力分配单元,以及可选的1组额外储能组件;系统可根据飞行阶段(起飞/巡航/应急)动态调整能量来源,实现“效率优化+可靠性提升+质量轻量化”的多重目标。
3.1
系统整体架构概览
该混合动力推进系统的核心逻辑是“多能量源协同,按需分配动力”,其整体架构如图1(第一架构)与图2(第二架构)所示,主要包含三类关键单元:

图1 以简化的方式展示了符合本发明的混合动力垂直起降(VTOL)飞机的电力推进架构的第一个示例
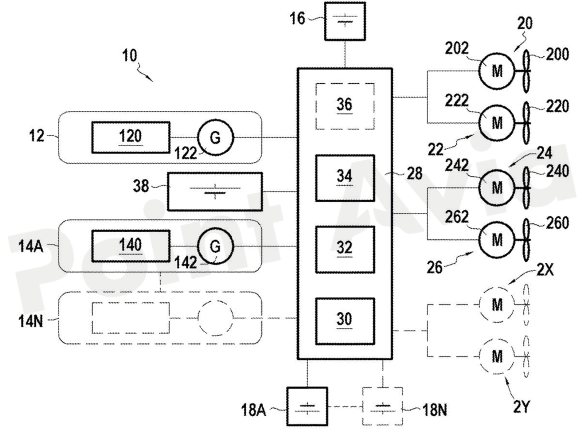
图2 以简化的方式展示了符合本发明的混合动力垂直起降(VTOL)飞机的电力推进架构的第二个示例
能量分支单元:至少2个,每个分支由“燃烧发动机+发电机+储能组件”组成,且分支间采用不对称功率配置(发电机功率比1.2-1.4);
电动推进器单元:由多个电动马达(202、222、242、262)与对应旋翼(200、220、240、260)组成,总数2-12个(或更多),提供飞机所需的升力与推进力;
电力分配与控制单元:以电力分配单元28为核心,包含AC-DC转换器30、DC-AC转换器32、接触器阵列34及DC-DC转换器36,负责能量源的切换与动力分配。
其中,图1与图2的核心差异在于“是否包含额外储能组件38”:图1为“基础架构”,仅每个能量分支配备储能组件(16、18A、18N);图2为“优化架构”,在基础架构上增加1组额外储能组件38,用于应急重启与功率补充,进一步降低整体储能质量。
3.2
核心部件详细说明
3.2.1
不对称能量分支:
解决“单源依赖”与“效率优化”问题
能量分支是系统的动力源头,本文的核心创新之一是“不对称功率配置”——通过2个燃烧发动机驱动的发电机(122、142)形成功率差异,确保“更强大的发电机可单独满足所有飞行条件的功率需求”,同时支持“经济模式”运行。
燃烧发动机与发电机的组成
每个能量分支包含1台燃烧发动机(120、140)与1台发电机(122、142),形成“涡轮发电机”组合:
燃烧发动机(120、140):本文明确其可选类型为“燃气涡轮发动机”“活塞式内燃机”或“旋转式内燃机”,通过“自由涡轮”或“联动涡轮”驱动发电机(122、142);发动机的燃料存储于独立油箱(未编号,本文提及“燃料存储在未示出的油箱中”),可根据飞行任务需求加注航空煤油或其他燃料。
发电机(122、142):与燃烧发动机刚性或柔性连接,负责将机械能转换为电能;本文关键设计是“两台发电机的功率比为1.2-1.4”,本文给出典型示例:第一发电机122输出功率400kW,第二发电机142输出功率300kW(功率比1.33,处于1.2-1.4区间)。
这种不对称配置的优势在于:当飞机进入巡航阶段时,若400kW发电机122可满足巡航功率需求(通常300-350kW),则300kW发电机142可进入待机状态,避免“单发电机低负载运行”的效率问题,同时400kW发电机可始终运行在SFC最优区间。
分支储能组件:平滑功率与应急过渡
每个能量分支配备1组储能组件(16、18A、18N),其功能与配置随架构(图1/图2)变化:
图1架构中的储能组件**(16、18A、18N):需具备“与对应发电机功率匹配”的输出能力。例如,若发电机122为400kW、发电机142为300kW,则储能组件16(对应122)输出功率400kW,储能组件18A(对应142)输出功率300kW;其核心作用是“平滑发电机的功率波动”——当电动推进器(202、222等)因姿态调整出现功率峰值时,储能组件可快速补充功率,避免发电机频繁启停或过载,同时在发电机失效时,为对应推进器提供短时动力(如5分钟),争取降落时间。
图2架构中的储能组件**(16、18A、18N):功能简化为“仅平滑功率”,输出功率大幅降低,本文给出典型值为50kW;此时,储能组件不再需要匹配发电机功率,仅需抵消推进器的瞬时功率波动,因此整体质量显著降低(例如,2个50kW电池的质量远低于1个400kW+1个300kW电池的质量)。
储能组件的类型可选:若为不可充电式,采用“燃料电池”(如氢燃料电池,通过燃料化学反应发电);若为可充电式,采用“锂电池+超级电容”组合(锂电池提供持续功率,超级电容应对瞬时峰值,本文提及“可充电时为电池和/或超级电容单元”)。
3.2.2
额外储能组件38:
图2架构的核心优化,
解决“应急重启”与“质量冗余”
图2架构在基础架构上增加1组额外储能组件38,其设计目标是“替代分支储能组件的应急功能,同时支持待机发电机的快速重启”,是系统实现“轻量化+高可靠性”的关键。
功率与功能设计
额外储能组件38的输出功率“与功率较低的发电机匹配”,本文示例中为300kW(与发电机142功率一致),其核心功能包含两点:
应急重启待机发电机:当运行中的发电机(如122)失效时,额外储能组件38可通过接触器阵列34(图3)向待机发电机142供电,实现“快速重启”——本文提及“从额外储能组件38重启待机涡轮发电机14A”,避免传统系统“发电机失效后仅能依赖电池降落”的局限;
补充应急功率:若两台发电机同时出现功率衰减(如高海拔环境),额外储能组件38可直接向电动推进器供电,补充功率缺口,确保飞机姿态稳定。
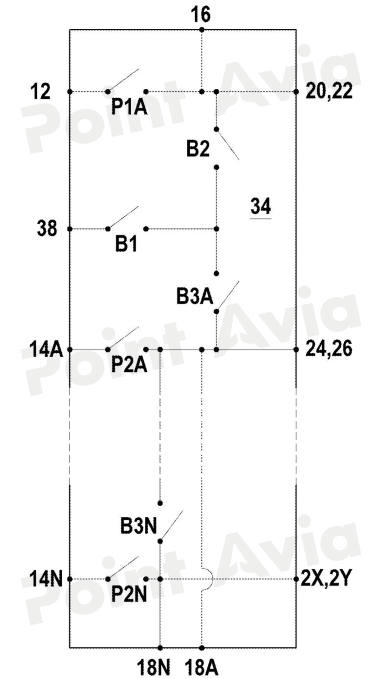
图3 展示了在符合本发明的混合动力垂直起降(VTOL)飞机的电力推进系统中实现的接触器阵列的示例性实施方式
轻量化优势
对比图1与图2的储能质量:
图1架构:2组储能组件(400kW+300kW),总功率需求700kW;
图2架构:2组分支储能(50kW+50kW)+1组额外储能(300kW),总功率需求400kW。
按锂电池能量密度(约0.3kW·h/kg)计算,图1架构的储能质量约为2333kg(700kW×1h/0.3kW·h/kg,假设1小时续航),而图2架构仅为1333kg,质量降低43%,大幅释放有效载重空间。
3.2.3
电动推进器单元:
多旋翼协同,适配VTOL升力需求
电动推进器是系统的“动力执行端”,由“电动马达+旋翼”组成,数量可根据飞机尺寸调整(本文提及“2-12个或更多”),典型配置如图1所示的4组推进器(20、22、24、26):
电动马达(202、222、242、262)
功能:接收电力分配单元28的交流电,将电能转换为机械能,驱动旋翼旋转;
特性:可独立调节转速,本文提及“发电机转速远高于马达转速,且马达间转速可不同”——电力分配单元28通过DC-AC转换器32实现“转速 decoupling”,使每个马达可运行在最优转速(如起飞时高转速提供升力,巡航时低转速降低能耗);
辅助设计:部分马达可配备“减速齿轮”,用于降低旋翼转速、提升扭矩,适配大直径旋翼的推进需求。
旋翼(200、220、240、260)
类型:可选“单螺旋桨”或“对转双同心螺旋桨”,对转螺旋桨可抵消反扭矩,减少飞机姿态控制的复杂度;
动力分配:在图1的分支隔离模式下,每个能量分支对应一组推进器——例如,发电机122(400kW)驱动马达202、222,控制旋翼200、220;发电机142(300kW)驱动马达242、262,控制旋翼240、260;若某一分支失效,另一分支可通过接触器阵列34接管所有推进器(图3的接触器闭合实现),确保动力不中断。
3.2.4
电力分配与控制单元28:
系统的“智能大脑”
电力分配单元28是能量调度的核心,整合了“功率转换”与“路径控制”功能,确保不同能量源(发电机、储能组件)按需向推进器供电,其内部结构如图1、图2所示,包含四大组件:
AC-DC转换器30
输入:发电机122、142输出的交流电(典型频率400Hz,航空标准);
输出:直流电(如270V DC,飞机直流电网标准);
功能:将发电机的高频交流电转换为稳定直流电,接入飞机直流电网,为DC-AC转换器32与储能组件(16、18A、38)供电;同时实现“电压调节”,避免发电机功率波动导致的电网电压不稳定。
DC-AC转换器32
输入:飞机直流电网的直流电;
输出:可调频交流电(频率与马达转速匹配);
功能:根据飞行控制指令(如起飞时高频率、巡航时低频率),将直流电转换为适配电动马达(202、222等)的交流电,实现“转速精准控制”——例如,当飞机需要左转向时,降低左侧马达202的频率(转速下降),增加右侧马达242的频率(转速上升),通过扭矩差实现转向。
接触器阵列34:路径控制核心(图3详解)
接触器阵列34是“能量路径切换”的执行机构,其结构如图3所示,包含7个关键接触器(P1A、P2A、P2N、B1、B2、B2A、B3N),每个接触器的功能与动作逻辑如下:

典型动作示例:当发电机122失效时,接触器阵列34的动作流程为:
P1A断开,隔离失效的发电机122;
B1闭合,将额外储能组件38接入直流电网;
B2闭合,允许38向推进器20、22供电,维持姿态;
P2A闭合+B2A闭合,38向发电机142供电,实现重启;
142重启后,P2A保持闭合,B1断开,系统切换为142单独供电。
DC-DC转换器36
功能:将直流电网的直流电转换为适配储能组件的电压(如储能组件为400V DC时,将270V DC升压至400V DC),实现“储能组件充电”;
适用场景:仅当储能组件为可充电类型(如锂电池)时启用,若为燃料电池(不可充电),则DC-DC转换器36可省略;
充电逻辑:巡航阶段,当发电机功率大于推进器需求时,DC-DC转换器36自动启动,将多余电能存入储能组件,实现“能量回收”。
3.3
典型工作模式:
按需调度,适配全飞行周期
该系统的核心优势在于“根据飞行阶段动态调整能量源”,覆盖“起飞/降落”“巡航”“应急”三大典型场景,每个场景的能量调度逻辑如下:
3.3.1
起飞/降落阶段:
大功率需求,双分支协同
工况特点:需最大功率(如700kW)以提供足够升力,功率波动频繁(如姿态调整导致推进器功率峰值);
能量源:两台发电机(122、142)为主,分支储能组件(16、18A)为辅;
调度逻辑:
接触器P1A、P2A闭合,B2、B2A断开(分支不隔离),122(400kW)与142(300kW)同时向直流电网供电,总功率700kW;
AC-DC转换器30将交流电转为直流电,DC-AC转换器32根据推进器需求输出可调频交流电;
当推进器出现功率峰值(如瞬时升至750kW)时,分支储能组件16(50kW)、18A(50kW)自动放电,补充50kW缺口,避免发电机过载;
降落阶段,功率需求逐渐降低,系统逐步减少发电机输出,最终切换为“单发电机+储能”供电,平稳着陆。
3.3.2
巡航阶段:
效率优先,经济模式运行
工况特点:功率需求稳定(如350kW),需长期运行,追求低燃油消耗;
激活条件:本文明确为“前进速度>100节(约185km/h)”且“单发电机可满足功率需求”;
能量源:单台大功率发电机(122,400kW)为主,额外储能组件38 standby;
调度逻辑:
接触器P1A闭合,P2A断开(142待机),122单独向直流电网供电(400kW),满足350kW巡航需求;
多余50kW功率通过DC-DC转换器36存入分支储能组件16、18A(50kW+50kW),实现能量储备;
额外储能组件38通过B1保持“低压连接”,随时准备重启142;若环境温度升高导致122功率衰减至320kW,B1闭合,38补充30kW功率,维持巡航需求;
经济模式可节省超过10%的燃油(本文提及“燃油节省>10%”),同时延长发电机寿命(避免双发电机长期运行的磨损)。
3.3.3
应急模式:
故障冗余,安全优先
应急模式分为“单发电机失效”与“双发电机功率衰减”两种场景,以“单发电机122失效”为例(图2架构):
故障检测:系统通过传感器检测到122输出功率骤降为0,触发应急程序;
第一步:隔离故障源:接触器P1A立即断开,切断122与直流电网的连接,避免故障扩散;
第二步:维持姿态:接触器B1闭合、B2闭合,额外储能组件38(300kW)向推进器20、22、24、26供电,维持飞机姿态稳定(约30秒);
第三步:重启待机发电机:接触器P2A闭合、B2A闭合,38向142供电,启动142的燃烧发动机,约10秒后142输出功率达到300kW;
第四步:恢复供电:142功率稳定后,B1断开,P2A保持闭合,系统切换为142单独供电(300kW),若巡航功率需求为350kW,分支储能组件16、18A(50kW+50kW)补充50kW,确保飞行安全;
后续操作:飞行员可选择“继续飞行”或“就近降落”,系统根据剩余燃油与储能状态提供建议。
3.4
两种架构对比(图1vs图2)
本文提出的两种架构(图1基础架构与图2优化架构)适用于不同应用场景,其核心差异与适用范围如下表所示:
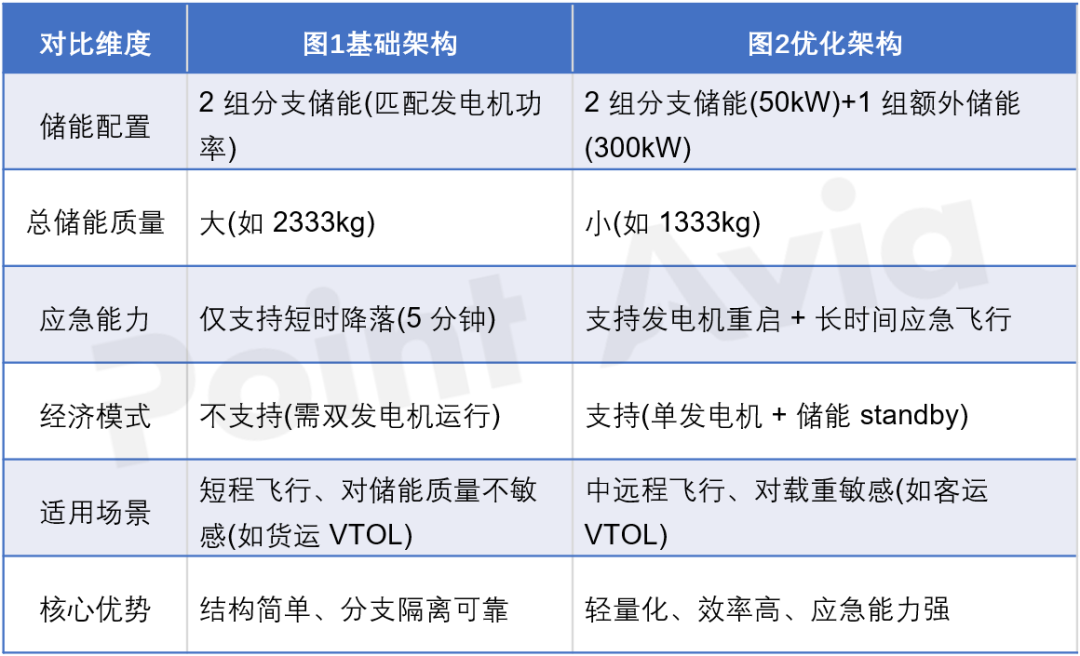
两种架构的共性在于“不对称能量分支”与“智能电力分配”,均解决了现有技术的效率与可靠性痛点,用户可根据实际需求选择适配架构。

总结
本文提出的VTOL飞机混合动力推进系统,通过“不对称双能量分支”打破了传统单涡轮发电机的效率局限,通过“额外储能组件”解决了应急重启与轻量化需求,通过“智能电力分配单元”实现了全飞行周期的能量优化。该系统不仅提升了VTOL飞机的燃油效率(巡航阶段节省>10%燃油)、有效载重(储能质量降低43%)与应急能力(支持发电机重启),还具备良好的扩展性(推进器数量2-12个,储能类型可选),为城市空中交通、应急救援等场景的VTOL飞机提供了可行的动力解决方案,推动混合动力技术在航空领域的产业化应用。
如有本专利原文
请联系要点纵航工作人员!

要点纵航工作人员微信
来源:公开信息,要点纵航整理
提示:原创文章未经允许,请勿转载
免责申明:本文中所含内容乃一般性信息,包含的价格及观点仅供贵方参考,要点纵航不对任何方因使用本文内容而导致的任何损失承担责任。

要点纵航专注于低空经济和eVTOL技术的发展,识别并研究行业的关键障碍及相关需求。我们通过提供数据、分析和见解,与行业参与者共同致力于实现安全、可持续、低成本且可及的变革性城市空中出行方式。一公里的地面交通只能带您走一公里,而一公里的空中飞行可以带您到任何地方!
如您想获取更多关于eVTOL技术的最新消息,请添加相关人员或通过电子邮件,把您的要求发送给我们。

18958230600

alfred.shen@cycolpower.com

你们点点“分享”,给我充点儿电吧~










