机器人技术正日新月异地发展,特斯拉、本田、小米、波士顿动力、川崎重工和Apptronik等众多企业纷纷投身人形机器人研发。这一领域已成为全球性竞争,美国、中国和欧洲正引领主要发展方向。
人形机器人研发属于跨学科工程,涉及多种技能、知识、技术专长与协同创新。由于系统复杂、环节众多,要实现各部分协调运作颇具挑战,包括不同技术团队之间的协作。从技术角度看,其发展依赖电子技术、材料科学、知识产权与工程(IP&E)以及人工智能(AI)等多领域的突破。
近年来,得益于电池技术、先进传感器与摄像头、执行器、印刷电路板(PCB)、无源电子元件与互连技术、电机、存储器件以及先进软件算法(含AI)的进步,人形机器人在类人化和可靠性方面显著提升。随着技术持续演进,人形机器人也将不断升级(图1)。

图1:人形机器人展现了机器人领域人工智能与现代工程的深度融合。(来源:Adobe Stock)
业界普遍认为,人形机器人有望承担电动汽车组装、零部件分拣等制造任务,执行对人类而言危险或有害的特殊作业,以及人们通常不愿从事的“脏活”。然而,在实现大规模应用前,仍存在诸多相互交织的技术瓶颈亟待解决。
成本也需大幅降低。尽管近两年技术进步已显著压缩了人形机器人的价格,但距离具备广泛商业吸引力仍有很长的路要走。
仍有大量工作要做
近年来人形机器人能力的快速跃升,主要由AI驱动。AI的迅猛发展显著提升了人形机器人的性能与功能,这并非偶然——AI能更高效地协调控制机器人的多重功能。它使人形机器人具备了前所未有的学习与适应能力。但即便如此,要达到更高的功能水平,仍有大量工作要做。
目前,人形机器人通过机器学习、模仿学习和强化学习算法来感知环境并执行任务,如开门。这些方法超越了传统编程的局限,其从重复与错误中学习的能力,正推动更智能机器人的诞生。
然而,人形机器人尚未被充分训练以准确感知真实世界。它们试图在现实中模仿的精细人类动作,需要海量数据支撑,而这类数据往往难以获取——这正是提升性能的关键下一步。此外,在人形机器人中开发更高级的AI功能本身也极为复杂,需分别构建用于创建、模拟和运行AI的三个独立计算机框架。
该领域前景乐观。英伟达正凭借其庞大的专业团队,积极解决人形机器人研究中的AI难题——如同其在众多AI应用领域所做的一样。该公司通过生成模拟不同环境与动作的人工数据集,助力机器人研发。生成式AI的进步也在持续增强人形机器人的学习能力。
这一方法使得机器人在投入实际应用前就能接受更充分的训练。英伟达已攻克机器人感知方面的挑战,目前正聚焦于强化学习,以提升机器人在执行任务时的操作与运动规划能力。
从技术差距看,AI在操作与交互方面的能力仍显不足,而导航问题已基本解决。因此,英伟达在该领域的努力已产生广泛影响——它正积极参与美国所有重大人形机器人项目的“AI大脑”开发。
人形机器人尚未实现通用智能,但未来几年AI能力的进一步突破,将为达成这一目标奠定关键基石。
触觉传感器前景光明
触觉传感器对人形机器人至关重要,使其能感知环境、识别物体并执行操作。它是一个多组件系统,集成了力、压力、扭矩、滑移和温度传感器,采集的数据可反馈至肢体,使其根据物体的形状、硬度和柔软度执行相应动作。由于这一数据反馈回路,触觉传感器也依赖于机器人的AI系统,因此AI的进步将提升带触觉传感器肢体的效率与精度。
触觉传感器是集多种传感器、柔性电子皮肤、IP&E组件与先进AI算法于一体的复杂系统。目前其精度虽有提升,但仍大有改进空间,而AI可能再次成为突破口。但仅靠AI不够——传感器本身必须高度灵敏。正是材料科学的最新进展,才使科学家得以开发出有效的电子皮肤(图2)。

图2:柔性电子皮肤使机器人具备类人触觉,可识别材质与纹理。(来源:Adobe Stock)
目前许多方面仍处于初级阶段,有待优化。鉴于这些系统直接影响机器人执行任务的能力,其越精确可靠,整体表现就越好。
触觉传感器的进步必将带来更优的机器人肢体。当前多数机器人抓手仅有两指或吸盘。开发类人肢体极为困难,因为它需模拟多肌肉协同工作的系统——无论是在腿部、手部还是颈部。因此,持续的材料研发对实现更逼真的触觉系统至关重要。
融合先进传感器与AI技术,将有助于开发出控制度更高(通过更优的执行器管理)和自由度更多的肢体,使人形机器人具备接近人类的灵巧性,从而执行更广泛的任务——如更自然的行走、头部转动或抓取物体。
触觉感知的未来充满希望,更先进的系统或将很快应用于人形机器人。在材料端,全球多家企业正致力于研发薄膜柔性传感器(电容式、触觉式、振动式、应力式、压力式、压阻式、力式、位置式、接近式及多模态)、智能肢体(足、手、指尖)、柔性PCB和电子皮肤,以攻克类人肢体的材料难题。
除人形机器人开发商外,全球已有20多家公司专注于为机器人肢体开发和供应传感器及系统,行业创新与技术储备充足。唯一的潜在障碍是地缘政治因素。
目前许多此类企业位于中国,若全球地缘政治紧张持续,它们可能转向仅服务国内市场。届时需在各地建立独立供应链以推动创新,这将耗时较长。
要超越现有水平,进一步提升机器人肢体传感器的灵敏度与精度,离不开AI。生成式AI已在提升机器人肢体运动与抓握能力方面展现出巨大潜力。英伟达再次引领该领域,正开发模拟工作流程,以构建更先进的抓握系统(包括反应式抓握与新物体抓握)以及具备高级运动能力的肢体。
鉴于触觉传感器对人形机器人功能至关重要,其持续进步将为人形机器人开辟更广阔的应用与市场。该领域的主要挑战在于,如何将肢体材料开发的复杂性与AI研发及集成相结合,打造出功能完备的系统。这虽非不可能,但物理层面已有诸多因素需考量,再叠加软件挑战,注定需要时间。
执行器面临供应瓶颈
目前存在供应瓶颈(非技术瓶颈)的部件之一是执行器组件——线性执行器中使用的行星滚柱丝杠。这类丝杠能承受重载,并在引导执行器连接的肢体时提供高精度(图3)。
但这些部件价格高昂,产能相对于未来理论需求也显不足——意味着必须扩大生产规模并降低成本,以满足人形机器人的量产需求。
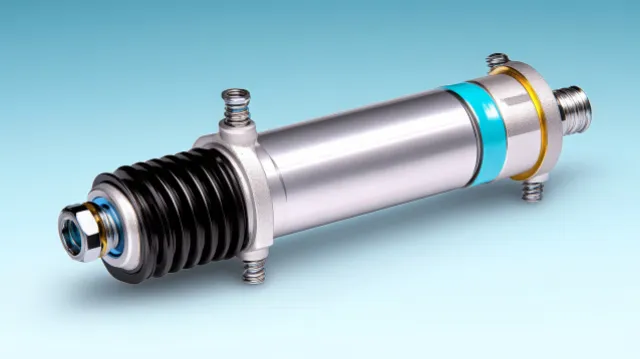
图3:带有银色和黑色组件的工业气动执行器。(来源:Adobe Stock)
不过前景仍存希望。正如任何供应链,需求会催生竞争与供应增长。高盛报告预测,未来这些螺钉的产量有望提升,成本也将随需求上升而下降。但这取决于多个因素。
一方面,增产程度取决于生产设备——尤其是高精度磨床的可获得性,而此类设备多由日本和欧洲供应。因此,进出口限制可能导致未来供应瓶颈持续。瓶颈不会是全球性的(总有地区能获取设备),但会因各国进口政策不同而呈现区域性差异,这是一个需持续关注的动态局面。
过去,由于应用多属小众,无需大规模生产,故供应有限。随着人形机器人走向主流,这些设备产量将上升,行星滚柱丝杠的成本也有望随之降低。此外,特定工艺的技术诀窍和专业知识的分布不均,也可能导致不同地区在人才上存在差异,进而引发区域性供应瓶颈。
人形机器人的未来
尽管面临技术和供应挑战,前景依然光明。过去几年已取得显著进展。高盛预测,到2035年,全球人形机器人市场规模将达380亿美元——而两年前的预测仅为约60亿美元。这不仅凸显了AI近两年的巨大推动力,也预示着随着AI能力进一步提升,并带动其他协同技术发展,当前预测仍有指数级增长空间。
其他方面也释放积极信号。本文提到部分组件的成本问题制约规模化发展,但自2023年以来,物料成本已下降约40%,从一年前的25万美元降至15万美元。大多数组件的普及和供应链的扩展已推动机器人成本下降。随着需求增长,成本有望进一步降低,理论上可实现数百万台的销售。
目前,高盛预计到2031年,全球设施将部署100万台人形机器人,比此前预测提前4年——这同样得益于AI的进步。因此,尽管仍有挑战待解,但在克服技术难题、扩大生产和分销至各行业方面,人形机器人未来可期。
THE END