
「 首个无人机360°数据采集与仿真平台」
做无人机视觉,大家都知道一个尴尬现实:你想让模型尽可能看懂更多语义,但语义标注是一件非常耗时耗力的工作。
尤其是 360° 全景这种视角,优势很明显:目标可能在背后、侧后方、上方,全景一帧就能把“周围发生了什么”装进来。但代价也很现实:真实全景数据难采、难标、规模小,研究常常卡在“没有足够的数据证明方法真的泛化”。
影石团队把无人机第一视角的全景世界搬进了模拟器里,做成一个能闭环交互、能自动采集、还能给出一致标注的全景仿真平台AirSim360,并配套发布 Omni360-X 数据集。
它不是单纯“又一个场景”,而是想把全景理解、行人交互、轨迹生成这些研究里最费人力的部分,变成一套可复用的基础设施。
很多人做全景仿真会走一条“笨办法”:让无人机在原地转一圈,采几张图再拼起来。但作者指出这在效率和真值定义上都有坑:
全景深度本质上是沿视线方向的距离(slant range),和普通透视相机的深度概念不一样,简单拼接会带来标注和几何的不一致。
AirSim360 的思路是从平台层解决:基于 Unreal Engine 的渲染与 AirSim 的无人机体系,把全景采集、标注生成、交互行人、轨迹生成做成统一闭环,并提供工具链直接产出 ERP(等距柱状投影)格式的全景图与对应标签。
更重要的是,他们不是只做“能渲染”,而是给出三块可直接服务研究的能力:
-
render-aligned 的多任务标注生成(几何/语义/实体级);
-
可交互行人系统(行为模拟 + 关键点标注 + 跨帧身份一致);
-
自动轨迹生成(Minimum Snap,用少量航点生成满足动力学约束的轨迹)。
这三块组合起来,才让“全景无人机”从演示变成可规模化训练的对象。

图1|AirSim360 平台概览:作者提出一个面向无人机的 360° 全景仿真平台,基于高质量渲染引擎,实现“能飞、能看、能闭环”的全景无人机模拟。平台同时提供一套集成工具链,支持在不同飞行场景中自动采集用于智能任务的数据(图像与多种标注),让全景系统的训练与评测更容易规模化开展
全景数据与标注不是“后处理”,而是“渲染对齐”直接产出
AirSim360 强调的是 render-aligned:在渲染阶段就把全景图和对应的几何/语义/实体级信息对齐输出,而不是先拍图再外部拼接补标签。
它支持 ERP 全景格式,并在系统里明确了全景深度的定义方式,避免把透视深度概念硬套到全景上造成偏差。
这对全景任务很关键,因为全景图的投影与几何关系更复杂,一旦标签不一致,会导致模型在学习的过程中,看到的画面和感受到的距离不一致,从而无法对空间建立集合一致性的认识。

图2|全景图的标准表示与生成方式:作者采用全景领域常用的 等距柱状投影(ERP, equirectangular projection) 来表示 360° 图像。在实现上,他们配置了 6 个参数一致、朝向不同的相机。由于仿真里相机是理想针孔模型(无畸变),六个视角的输出可以通过拼接算法无缝合成为对应的全景图,为后续的全景感知任务提供统一输入
可交互行人系统,把“人”变成可控变量,而不是随机噪声
平台内置行人系统,支持不同密度、不同类型行为,并提供关键点等标注,同时保证跨帧的身份一致性。
这意味着你可以系统性地研究:人在视野里出现、遮挡、移动时,模型的距离估计、跟踪、规避等能力到底会怎么变化。
作者也基于这一模块构建了 Omni360-Human,并用实验展示加入该数据后对距离估计任务有帮助。

图3|IPAS(可交互行人系统)的逻辑框架:图中用概念图说明 IPAS 如何把三部分串起来协同工作:行为树(Behavior Tree):描述“要做什么”的高层行为逻辑;状态机(State Machine):管理不同行为/状态的切换;消息传递系统(message passing):让多个自主体之间能够通信与交互。目的是在仿真中生成更真实、可控、可复现的行人互动场景
自动轨迹生成,把“飞行数据采集”从手工操控升级为程序化生产
他们引入 Minimum Snap 轨迹生成,用少量航点即可生成满足动力学约束的平滑轨迹,用于自动化采集与控制。
这让数据采集不仅规模更大,还能更稳定地覆盖不同速度、转弯、上升下降等飞行模式。
对应地,Omni360-WayPoint 提供大规模航点/轨迹资源,并给出了不同场景的轨迹数量与长度分布统计。

图4|AirSim360 的核心交互架构与数据生成模块:左侧展示平台闭环交互的三大核心:飞控模块(控制无人机运动)、渲染引擎(生成全景观测与真值)、推理引擎(运行算法并与仿真交互)。中间与右侧则给出三套“为数据而生”的模块:IPAS:可交互行人系统(Interactive Pedestrian-Aware System),自动轨迹生成器(Automated Trajectory Generator),数据采集工具包(Data Collection Toolkit)。它们共同解决“全景数据难采、难标、难控变量”的问题
AirSim360 在实验部分采取的是“平台指标 + 数据价值”两条线。平台侧,首先给出了Omni360-Scene数据集的整体构成,由4个大规模的城市场景构成。同时作者给出了在这些场景中的飞行路径和轨迹信息。

图5|Omni360-Scene 数据集构成统计:该数据集包含 4 个 Unreal Engine 城市场景,每个场景对应不同风格与尺度的城市环境。作者在各场景中采集全景图像及配套标签(如语义/实体等),表格最后一列统计每个场景的标签总量,用于体现数据覆盖与标注规模

图6|Omni360-WayPoint 轨迹数据总结:作者在 4 个室外场景中生成不同长度、不同采样密度的飞行路径,并强调轨迹满足物理一致的无人机动力学约束。它主要服务于“可控轨迹下的全景数据采集”和导航/控制类任务评测
更关键的是“数据到底有没有用”。作者用 Omni360-X 的不同子集去服务不同任务,并在多个公开数据/评测上验证增益:
全景深度估计:训练在 Omni360 数据上,在跨域/外域评测上表现更好。

图7|全景深度估计的量化对比:作者在 UniK3D 模型上进行微调,比较使用 Deep360 与使用 Omni360 数据训练时的效果
全景分割(语义/实体):加入 Omni360-Scene 后,在 WildPASS 上语义 mIoU 与实体 mAP 有明显提升。
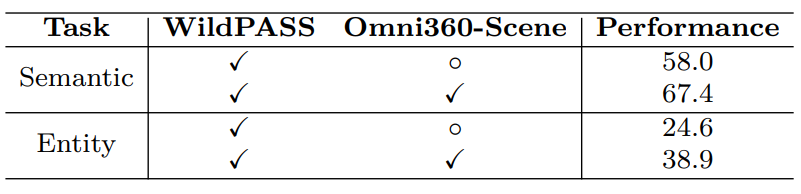
图8 | 全景分割的量化结果
全景 VLN(视觉语言导航):给出多个视觉语言模型在 SR/SPL/NE 等指标上的结果,并提出一个挺有意思的现象 YOMO(You Only Move Once):全景视野让无人机在靠近目标时可能几乎不需要频繁转向,单步决策就能接近较优动作。

图9|全景视觉语言导航(VLN)评测结果
AirSim360 这类工作看起来像“做平台”,但它实际上在补一个全景研究最缺的环节:规模化、可控、可复现的数据与验证环境。它把全景标注、交互行人、自动轨迹这些高成本部分工程化,顺手还用 Omni360-X 给了研究社区一个可直接训练与对比的基准起点。
审编|阿蓝
论文标题:AirSim360: A Panoramic Simulation Platform within Drone View
论文作者:Xian Ge, Yuling Pan, Yuhang Zhang, Xiang Li, Weijun Zhang等
论文链接:https://arxiv.org/pdf/2512.02009
项目主页:https://insta360-research-team.github.io/AirSim360-website/










