该飞机正在开发中,以满足关键航空货运物流的需求,安全和效率是首要任务。倾转翼飞机属于垂直起降(VTOL)飞机的范畴,可以在推力飞行中自由起降,但通过物理配置的改变过渡到机翼升力飞行。在倾转翼的情况下,主翼与推进器一起从推力飞行中的垂直位置旋转到升力舱飞行中的水平位置。与其他垂直起降类型一样,这种配置变化最大限度地减少了起飞和着陆所需的地面足迹,同时与旋翼飞机相比,提供了高效的前飞,以增加航程和续航力。
倾转翼飞机的主要优点是主螺旋桨与机翼的相互作用。推力矢量与翼弦的固定对齐确保了机翼始终由上游螺旋桨提供能量。此外,由于只需要一个倾转致动器来转换飞机,因此降低了飞机的机械复杂性。

Dufor航空航天Aero2倾转翼飞机
Dufor航空航天不是第一家也不会是最后一家制造倾转翼飞机的公司。该公司深受之前建造和飞行的倾转翼飞机的启发,最著名的是Canadair Dynavert CL-84,这是一个非常成功的项目,展示了倾转翼配置的良好性能和操控品质。Dufor的目标是在这架飞机的成功基础上再接再厉,同时弥补其一些不足。最值得注意的是,降低了双轴驱动涡轮发动机联接为主螺旋桨和尾螺旋桨提供动力所需的机械复杂性。
此外,CL-84利用机械混合器和控制执行器的定时调整,简化了操作模式转换期间的飞行员控制。尽管这是非常成功的,并得到了40多名飞行员的好评,但这架飞机仍然需要训练有素、技术娴熟的操作员。Dufor的目标是通过设计和实施全自动飞行控制系统,进一步消除对飞行员的需求。
本文重点介绍Dufour用于开发、验证和最终验证其飞行控制系统的技术和方法。所介绍的工作是在过去2.5年中在自动飞行控制系统的设计和实施过程中进行的。它概述了飞行动力学和控制系统(FDCS)团队的建模和控制工作。本概述由三篇补充论文补充,这些论文对模拟、飞行控制和制导系统提供了更详细的见解。
飞机描述
Dufor制造了两架飞机,一架是用于生产的Aero2,另一架是名为AeroMini或AM10的小型开发飞机。

Aero2处于悬停飞行状态
Aero2飞机是Dufor的第一架生产飞机。它的最大总重量为208公斤,翼展为6米。设计的有效载荷容量为40公斤,额外容量可达12公斤燃料。
该飞机旨在满足效率、可靠性和安全性至关重要的关键货物交付需求。如图所示,该飞机有一个可倾转的主翼,可以从水平位置旋转90°到完全垂直的位置,进行垂直起降。
推力由四个48英寸、2孔桨距的推进器产生。一个额外的26英寸尾螺旋桨在悬停时提供俯仰控制,在巡航时关闭并随风同步。每个螺旋桨由冗余传动系统驱动,其中轴由双绕组电动机旋转,每绕组配有专用电子速度控制器(ESC)和电池。每个动力总成的尺寸都是这样的,即任何一个绕组都可以自行驱动螺旋桨达到最大推力。在从推力飞行到升力飞行的过渡过程中,四个主螺旋桨的桨距从悬停设置过渡到巡航设置。然而,俯仰机构不是冗余启动的,在任何一种设置下,飞机都能够悬停和巡航飞行,尽管效率降低。
飞机上总共有12个控制面:横跨主翼全翼展的8个襟翼、两个升降舵和两个方向舵。每个表面都可以单独启动,尽管它们被分组为冗余对。这种冗余提供了对单个执行器故障的容错能力,包括执行器卡住、硬过调节或断电。主翼由单个线性致动器倾转。机翼倾斜范围为95°,允许在悬停时向后飞行,而无需俯仰飞机。机翼倾转致动器是唯一的非冗余致动器,但如图所示,机翼倾转致动器的故障不会导致飞机失控。
飞机的动力系统是混合动力系统,由电池和二冲程燃气发电机组成。电池的尺寸设计为提供高放电率,以满足起飞和着陆期间悬停飞行的能量需求。一旦进入巡航飞行,能量需求就会显著降低,发电机的功率足以驱动主螺旋桨并在飞行中为电池充电。
虽然混合动力系统的尺寸、性能和运行非常有趣,但这里提到它只是为了建立配置;主要用来研究飞行控制系统。
AeroMini Dufour的一个关键开发工具是称为AeroMini(AM10)的缩比平台,该平台已被证明在验证关键技术方面非常有效。AM10是一种小型倾转翼飞机,大约是Aero2的一半大小,尽管它不是一个精确的复制品。AM10的主要目的是作为一个开发平台,在集成到更大的Aero2飞机之前,验证飞行控制系统和其他基本硬件。
虽然AM10复制了Aero2的执行器配置,但其推进系统的不同之处在于它是非冗余的,因为它不使用双绕组电机。重要的是,航空电子设备堆栈(包括飞行控制硬件和传感器套件)与Aero2相同。这个具有成本效益的平台能够在代表性的操作环境中对硬件系统和控制算法进行广泛的飞行测试。
AM10的翼展为3米,最大总重为30公斤。根据欧盟无人机监管框架的特定类别,故意选择这个尺寸是为了将AM10归类为较低的特定保证和完整性级别(SAIL)。因此,获得超视距(BVLOS)飞行许可的监管途径相对简单,监管程度较低。
AM10为一项关键挑战提供了一种经济高效的解决方案:在相关环境中积累宝贵的飞行小时,以验证飞行控制硬件和软件。它使高风险和早期飞行测试活动能够在将开发转移到Aero2平台之前安全经济地进行。
从发展的角度来看,AM10是无价的,在与Aero2合作之前提供了重要的飞行经验和系统验证机会。该平台不仅有助于算法验证和更新,而且在飞行员培训、改进测试程序和进行概念验证演示方面发挥着关键作用,大大降低了风险。

Dufour Aerospace AeroMini(AM10)倾转翼飞机
正在开发的航空电子硬件包括托管飞行控制软件的中央处理单元(CPU)、执行器的命令接口、机载飞行控制传感器、飞行员的命令和控制(C2)链路、飞行数据采集和遥测系统以及机载配电系统。
飞行控制软件完全由内部开发,从硬件抽象层(HAL)到飞行控制算法。这种自下而上的开发方法确保了最大的灵活性,以满足Aero2飞机的特定要求,而不会引入不必要的功能。因此,该软件保持了轻量级,优化了输入和输出效率,降低了HAL层的计算负载。此外,流线型的软件架构使Dufour能够保持简单的执行回路结构,同时仍然满足飞行控制系统的严格时序要求。操作系统的缺失,加上对任务执行时间的精确了解,也简化了监管审批过程,以确保飞行关键任务的确定性行为。
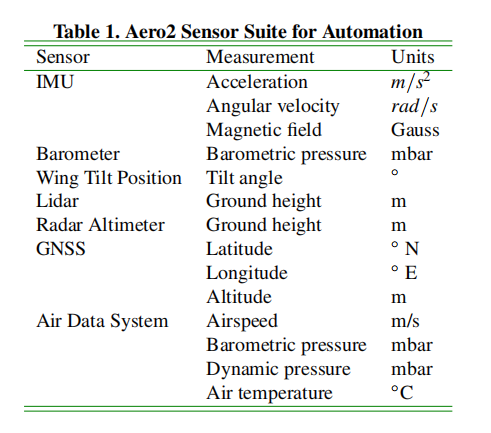
与控制和导航相关的传感器列表如下。关键传感器——定义为防止失控所必需的传感器——包括惯性测量单元(IMU)、气压计和机翼倾转传感器,其中有三个。额外的传感器可以提高导航性能,提供态势感知,并启用先进的控制模式,如速度跟踪和自主导航。
指挥和控制虽然主要的操作模式是自动飞行,飞行员/操作员通过地面站界面与飞机交互,但在紧急情况和飞行测试中,手动控制仍然可用。
该飞机的主要指挥和控制(C2)链路通过4G LTE蜂窝网络建立,为视距(VLOS)和超视距(BVLOS)操作提供强大的连接。该主链路由卫星通信(SATCOM)系统(如Starlink)提供支持,以确保额外的冗余。
在飞行测试活动期间,特别是在VLOS内运行时,采用辅助2.4 GHz射频(RF)链路来提供低延迟手动控制。2.4 GHz链路增强了试飞期间的飞行员响应能力,而4G LTE链路作为主要的C2信道保持持续活动,确保了操作连续性并符合BVLOS安全要求。
在手动操作中,飞行员使用配备有两个2轴操纵杆和额外开关的标准RC(无线电控制)发射机来控制飞机。这些开关允许飞行员武装飞机,在飞行模式之间切换,并选择活动的C2链路。
尽管Aero2旨在实现全自动运行,但提供直观的手动控制界面仍然是一项关键要求。手动飞行员控制支持在测试阶段安全开发和探索飞机的飞行包线。它还确保了在意外情况或系统异常期间保持积极控制的能力。手动控制界面使试飞员能够在必要时进行干预,从而支持操作安全和监管合规目标。
控制背景
Milz和Rohr在各种飞行器配置中的工作表明,倾转翼飞机已经研究了各种控制策略,其中增量非线性动态输入版本(INDI)和模型预测控制(MPC)是最突出的。虽然最初不是为倾转翼平台开发的,但Härkegard提出的控制架构特别重要,因为它将控制任务分解为两个关键部分:控制分配和控制增强,同时还解决了执行器冗余问题。Lavretsky和Wise对伺服机构控制设计模型进行了全面的讨论,采用具有积分作用的线性二次型调节器(LQR)来实现鲁棒的参考跟踪。这种方法对于开发自适应和鲁棒的飞行控制系统特别有价值。此外,Berger等人的工作为纵向和横向控制设计提供了一种计算高效的方法,为大型固定翼飞机的操纵品质提供了见解。
在指导方面,文献提供了广泛的路径生成技术,通常采用贝塞尔曲线和杜宾路径。Beard和McLain的基础框架以其模块化方法而闻名,该方法从简单的几何元素组装轨迹。其中,Vazquez-Méndez和Casal提出的基于回旋曲线的过渡因其平滑的曲率变化和数值效率而特别引人注目。
对于路径跟踪,已经提出了几种策略,包括Stastny引入的L1制导律和各种MPC或模型预测轮廓控制(MPCC)技术,如Romero的MPCC。然而,这些方法通常是针对小型固定翼无人机或多旋翼无人机量身定制的,通常忽略了倾转翼飞机的混合动力学。虽然非线性MPC公式,如Rohr等人的公式,可以解决悬停和前飞之间的过渡问题,但它们需要高保真建模,并带来了巨大的计算负担,这可能会阻碍实时实现。在保持控制性能的同时降低复杂性。几何控制提供了一种可行的替代方案。该领域的一个基础参考是Jurdjevic的工作,该工作为非线性流形的控制提供了数学基础。特别令人感兴趣的是Xargay、Dobrokhodov和合作者制定的控制律,尽管这些方法主要应用于固定翼飞机,并没有完全解决倾转翼配置的具体挑战。
开发方法概述
Dufor采用了一种快速、以结果为导向的方法,尽早证明飞机设计能够进行预成型过渡,并且可以为该平台开发全自动飞行控制系统。这种方法给飞行控制设计过程带来了两个主要挑战。首先,通常没有足够的实验数据,如飞机和推进系统的风洞试验,作为初始控制设计的基础。其次,由于飞机在大部分飞行包线上都是开环不稳定的,因此从第一次飞行开始就需要飞行控制系统。
为了应对第一个挑战,Dufour利用第一性原理方法和历史空气动力学数据来开发飞行动力学模型和仿真架构。随着包括风洞结果和飞行试验数据在内的更多实验数据的可用,该模型可以逐步增强和完善。建模策略基于上世纪上半叶开发的方法论,用于捕捉机翼-螺旋桨相互作用。关键的挑战是创建足够通用和灵活的模型来支持快速开发,同时保持足够的保真度。
第二个挑战是开发一种对初始模型不准确具有鲁棒性的飞行控制结构。这种鲁棒性允许即使在数据不完整的情况下也能进行概念验证和演示飞行,同时具有足够的适应性,可以在飞行包线扩展时纳入新信息。随着飞机模型的更新和配置的改变,控制架构的设计保持稳定,最终朝着可以跨多个平台飞行的通用飞行控制系统趋同。
这种方法使大多数飞行控制软件开发和测试能够在较小的AM10平台上进行,大大降低了风险,加快了全尺寸飞机运行能力的进展。