电子发烧友网报道(文/莫婷婷)随着人形机器人产业从“运动控制”向“精细操作”跨越,灵巧手已成为决定机器人能否真正融入人类生活与生产场景的关键部件。而赋予灵巧手“灵魂”的核心,在于其感知系统——尤其是触觉传感器。
本报告将系统梳理灵巧手的功能需求、主流厂商技术进展、硬件架构拆解,并重点聚焦感知系统的演进路径与传感器选型,结合2026年春晚等标志性事件,揭示中国乃至全球灵巧手传感技术的突破方向与未来趋势。
灵巧手功能分类
灵巧手是模仿人类手部结构与功能的机器人末端执行器,具备多自由度、高灵活性、强适应性,且随着AI技术的赋能,灵巧手还将具备自适应与学习能力。进一步说,它不仅是抓取工具,更是机器人与物理世界交互的“神经末梢”,其主要功能包括抓取等基础功能,以及触觉感知、力觉感知等感知功能,获取抓取物体的性能等物理信息。
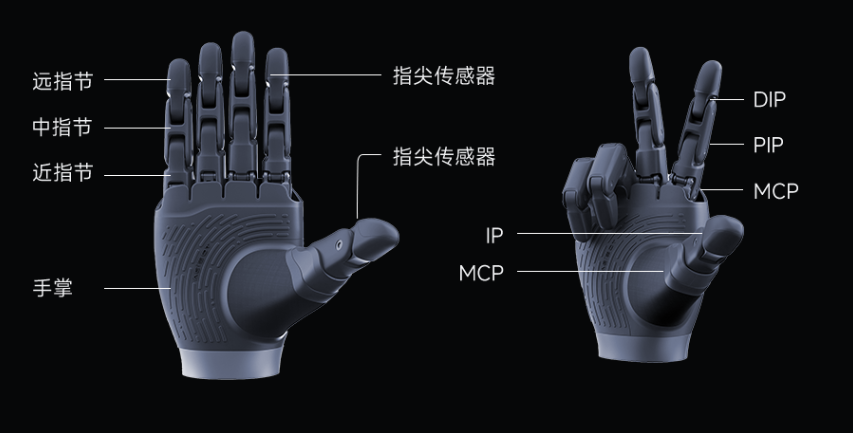
图:智元机器人OmniHand Pro专业款灵巧手关节结构命名与传感器布局示意图
不同功能对灵巧手的性能指标都有一定的需求,需要在力量、精度、速度、稳定性、成本、重量、可靠性之间取得平衡,例如抓取鸡蛋等物品时对触觉分辨率、力觉精度有较高的要求,避免对物品造成损害;面向在工厂抓取大件物品的灵巧手,对负载能力、自由度、活动范围有较高的需求。

图:灵巧手功能分类及性能指标
灵巧手感知系统与传感器技术方案
灵巧手主要由驱动系统、传动系统、感知系统组成。其中感知系统可分为内部感知和外部感知两大模块。内部感知系统负责监测手部运动状态,包括关节角度、扭矩、腱张力等;外部感知系统感知环境与物体属性,包括接触力、温度、纹理、滑移状态等。
从传感器的分类来看,触觉传感器、位置传感器、张力传感器、力矩传感器是被重点关注的四大类传感器。本次报告将重点分析触觉传感器。
灵巧手触觉传感器的技术方案呈现“百花齐放、多路线并行”的格局,尚未形成单一垄断标准。柔性触觉传感器品类众多,按照工作原理分为压阻、电容、压电、电磁式霍尔效应、光学和视触觉等。
压阻式触觉传感器
压阻式触觉传感的原理是外力导致导电材料(如碳纳米管、石墨烯复合材料)电阻发生变化。其制造工艺最成熟,供应链完善,市场份额也比较大,但是容易受到温度干扰,可用于对成本敏感或对极高精度要求不极端的工业场景。
电容式柔性触觉传感器
电容式柔性触觉传感器灵敏度高、响应速度快、易于阵列化集成,但是容易受到周围导电物体的电容干扰。在应用方面,开普勒的先行者K人形机器人指尖采用的电容式阵列式传感器,单指尖配备96个传感单元,可搬运、抓取物体等。
压电式触觉传感器
压电式触觉传感电子皮肤利用压电材料在受力时产生电荷的特性来实现触觉感知,具备高频响应快的优势,适用于检测振动、滑移起始瞬间等动态事件,但是无法检测静态力,因此通常与其他传感器共同使用。
霍尔效应触觉传感器
霍尔效应触觉传感器通过磁铁与霍尔元件的相对位移检测磁场变化,从而推算受力形变,其优点是力感知灵敏度高,易于实现高精度的三维力(Fx, Fy, Fz)解算。目前在高动态、抗冲击的机器人中应用较多。
代表产品例如帕西尼在2025年8月推出的第三代多维触觉传感器矩阵 PX-6AX-GEN3是全球首创6D霍尔阵列式触觉传感技术,支持1000Hz 频率输出六维力(三维力+三维力矩),测量精度达到0.01N,全量程 <0.5%FS 级重复精度。
光学式触觉传感器
光学式触觉传感器通过将施加的压力转化为光信号强度、波长等光学特性的变化,进而实现对压力的精确检测,具备高分辨率且不受电磁干扰的优势,但容易受温度波动影响。
视触觉传感器
视触觉传感器结合光学成像与触觉感知的传感方法,是接下来主要的技术路线之一。原理是在弹性体内嵌入微型摄像头或光纤,通过捕捉内部标记点的位移或光强变化,结合AI视觉算法重建接触面的三维形貌和力分布。具有超高空间分辨率的特点,易集成,抗干扰能力强。但是体积较大、计算量大、成本高,响应速度受帧率限制。
尽管不同技术路线各具优劣,企业通常需结合应用场景与成本预算进行组合选型,但大幅提升触觉传感器密度以追求极致拟人化与灵活性,已成为灵巧手发展的明确趋势。
主流厂商正通过激增的传感器数量来构建更细腻的感知网络,例如特斯拉其新一代 Optimus 灵巧手显著增加了触觉传感器的布局,覆盖全手。宇树科技新一代灵巧手Dex 5的传感器数量从上一代的33个激增至 94个,增加近3倍。

图:宇树Dex5-1灵巧手配备94个触觉传感器
ORCA Dexterity更是将这一趋势推向极致,其最新开源的 Touch版本单只手密布高达 351个 触觉单元。每个单元不仅能输出完整的三维力矢量(同时感知法向力、剪切力与滑移),更具备0.1牛顿的超高灵敏度与 1毫米的空间分辨率,更适用于轻柔抓取、滑移检测及精密装配等精细操作任务。
从几十到数百个传感器的演进,灵巧手正从“粗略感知”迈向“高分辨率触觉成像”的新阶段。
按照技术路线不同,主流的灵巧手触觉感知技术路线分为三种:力/力矩传感器,柔性传感器、基于视觉的触觉传感器(简称“视触觉”)。
力/力矩传感器按照工作原理包括上述提到的电阻应变式、压电式、电容式等,按照测量维度(自由度)分为单轴传感器 (1-DOF)、多轴力传感器 (2-DOF / 3-DOF)、六维力/力矩传感器 (6-DOF)等。
柔性传感器指的是由柔性材料制造的电子皮肤。
触觉传感器正如上述提到的:基于视觉的触觉传感器,简称“视触觉”,预计今年会有不少企业在该技术上取得突破。
就在近期,纬钛机器人发布了四款视触觉新品,包括全球首发超小尺寸、超高分辨率、超高频率视触觉仿生指尖 GF515。GF515具备超小尺寸、超高分辨率和超高频率,尺寸仅为15×27mm,体重小于15g,每平方厘米上万点的触觉信息密度,最小可探测10微米级的纹理细节,并能同时探测法向力、切向力、扭矩等多维力信息以及滑移状态等。分辨率达到10微米级、毫秒级延迟。
此外还有一种备受关注的技术路线:MEMS传感器。MEMS传感器指的是基于半导体工艺制造的微型应变制作而成的微型传感器。但从目前产业的进度来看,还未有成熟的量产且规模化的产品,多数处于技术攻坚、研发阶段。
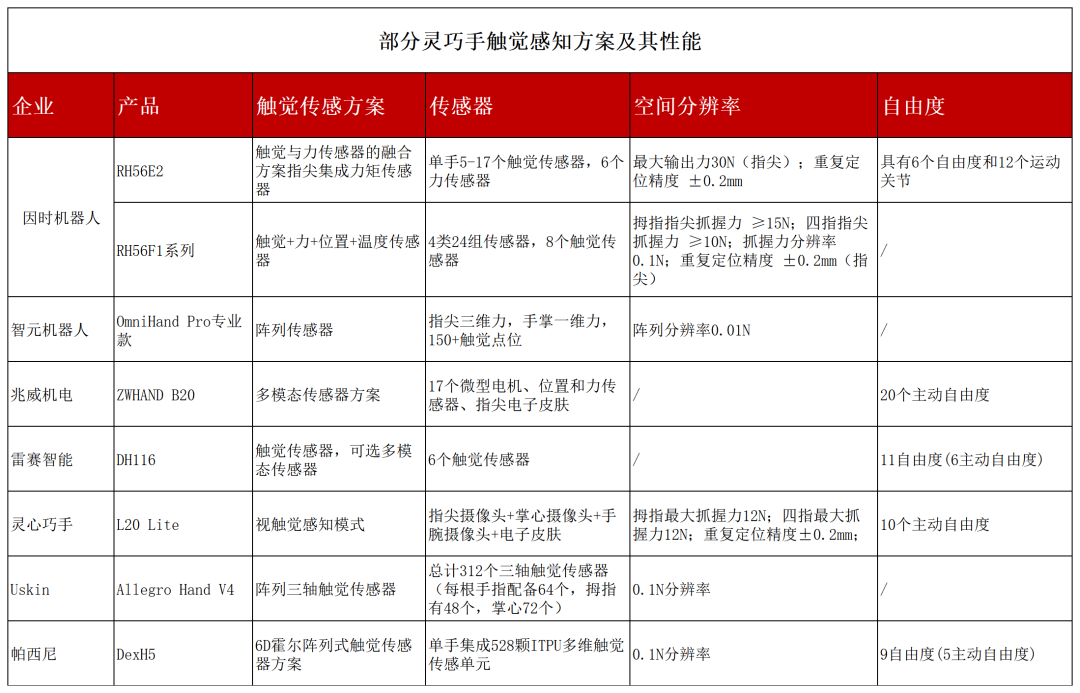
图:部分灵巧手触觉感知方案及其性能
从当前部分灵巧手触觉感知方案来看,未来灵巧手触觉技术的竞争,将不再局限于单一传感器性能,而是围绕 感知维度、响应速度、算法融合、成本可控等多维平衡展开。例如兆威机电将电机、编码器、力传感器高度集成于手指关节,打造“机电一体化”模块,推动结构紧凑化与功能内嵌化;帕西尼 DexH5主打单指集成多颗TFTPS多维磁通门传感器,在有限空间内实现高灵敏度力控,突出微型化与高精度并重。
场景分化下的商用灵巧手的性能升级
为拓展人形机器人应用场景,企业正加速迭代灵巧手技术,升级感知方案。
以特斯拉Optimus为例:第一代到第三代灵巧手的驱动方案采用的都是空心杯电机+行星减速器,传动方案由前两代的涡轮蜗杆,升级为第三代的丝杠+腱绳,自由度由前两代的11个,增加至第三代的22个,且感知方案也逐渐升级。
具体来看,2022年10月发布第一代灵巧手Optimus Gen1,2023年12月公布第二代,在指尖引入触觉传感器实现触觉突破,通过力反馈弥补纯视觉在抓取光滑易碎物体(如鸡蛋)时的局限,实现精准力控。
在今年AWE 2026首秀的第三代Optimus Gen3,预计灵巧手自由度翻倍至22个、驱动外置化(电机移至前臂以减轻手部重量)、腱绳传动以及触觉感知全覆盖,解决重量分布均衡问题并大幅提升操作灵活性;将触觉传感器覆盖全手,能够完成穿针引线等亚毫米级精细操作,并集成AI视觉系统,深度集成特斯拉FSD自动驾驶技术。

特斯拉第一代灵巧手的拆解图(图源:申万宏源研究)
2026年,国内人形机器人以登上春晚的形式再次“出圈”,从2025年宇树机器人的扭秧歌,到2026年春晚的叠衣服、武术、跳舞等表演,再到仿生机器人,人形机器人随着技术的迭代,加速跨越从“动态平衡”到“精细操作”的鸿沟,灵巧手也不再仅仅是执行简单抓取的机械夹具,而是进化为具备高分辨率触觉感知与自适应力控能力的“智能感官”。
魔法原子机器人MagicBot Gen1用灵巧手现场捞面、斟酒。根据官方介绍,MagicBot Gen1全身拥有42个自由度设计,单臂搬运负载≥7.5kg,全身静态负载达40kg。
魔法原子自研的灵巧手MagicHand S01,手部负载高达5公斤,作业场景下最高负载超20公斤,力分辨率最高可达0.1N。单手11个自由度(6个主动自由度,5个被动自由度),搭载了5个分辨率为0.1N的触觉传感器。
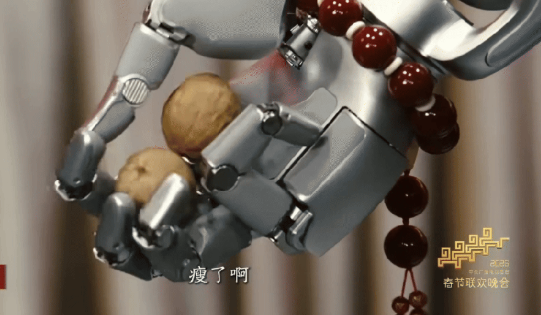
银河通用机器人在节目中捡起玻璃碎片、盘核桃,实现灵巧操作。其背后基于银河通用自主研发的集成“大脑-小脑-神经控制”于一模的全身全手端到端大模型——“银河星脑 AstraBrain”,银河通用将灵巧手神经动力小脑模型赋能来自 Sharpa的灵巧手硬件,实现对复杂物品的精细操控。
据介绍,Sharpa由禾赛科技三位创始人联合创立的企业,其推出的Wave灵巧手具备22个主动自由度,包括15个弯曲与伸展自由度,6个侧向移动自由度,1个向内旋转自由度。与传统机械手指关节仅能单向弯曲、缺乏横向调节能力的局限不同,Wave 通过增加6个侧向自由度赋予了手指在抓取过程中灵活横向展开或聚拢的能力。
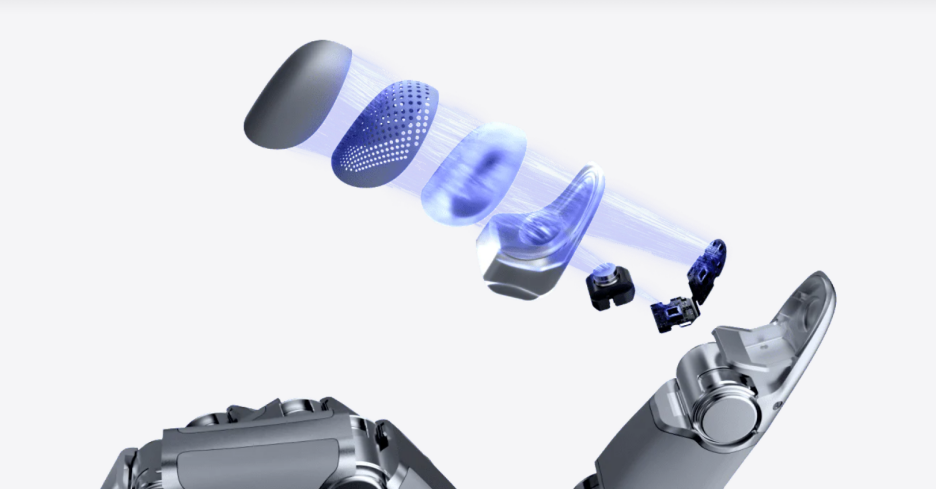
图:Wave灵巧手
可以看到,不管是硬件升级还是AI大模型赋能,灵巧手正加速迈向“会感、会想、会适应”的具身智能新阶段,逐步突破操作精度、环境适应性和任务泛化能力的瓶颈。
电子发烧友网统计了魔法原子、宇树科技、松延动力、银河通用的部分人形机器人灵巧手性能指标看到,在商业应用上,大部分灵巧手的自由度集中在10至22个之间。

图:部分人形机器人灵巧手性能指标
其中银河通用采用的Sharpa Wave达到22 DoF,是统计的企业中最高水平,包括15个弯曲与伸展自由度、6个侧向移动自由度、1个向内旋转自由度,并且通过搭载DAZA1动态触觉阵列,实现单指尖>20牛顿,所有手势的快速移动速度>4赫兹,追求“类人手”自然运动。
在科研、精密装配高端场景的需求正推动灵巧手向20+自由度演进;而家庭服务、教育等中低端场景仍以11 DoF为主,兼顾成本与实用性。此外,部分灵巧手产品已附带电子皮肤,例如松延动力的仿生机器人,用以提升灵巧手的精确度和适应性。
另一个值得关注的是,部分灵巧手增加了软件,具备持续进化潜力,例如银河通用通过大模型的加持,实现软件定义感知能力。










