芝能智芯出品
芝能智芯出品机器人正在经历一个关键变化,逐步演变为类似汽车的“复杂电子系统”。人形机器人与智能汽车之间,已经形成了高度统一的技术路径,人形机器人与现代汽车放在同一技术框架下,可以发现两者在核心模块上几乎一一对应。
人形机器人依赖中央计算单元完成感知融合、运动规划、SLAM与逆运动学,而汽车中的中央计算平台同样承担传感器融合与自动驾驶决策,本质都是“多传感器输入 + 实时决策输出”的系统。
机器人使用 EtherCAT、工业以太网等连接各个关节控制单元,汽车则从 CAN 总线向车载以太网演进。两者的目标一致,提高带宽、降低延迟,并通过 TSN 实现确定性通信。
机器人通常采用 48V–60V供电,汽车也在向48V系统演进;而在执行层,机器人关节和汽车执行器(座椅、电动门等)都是电机驱动系统,只是数量差异显著。

人形机器人是一个“高密度分布式电驱系统”,与汽车在架构上高度同构。
Part 1
机器人产业可以大规模复用汽车行业已经成熟的工程能力。
当前移动机器人(轮式、足式、人形)的核心能力,电机控制、计算平台、感知交互、能源管理、功能安全,都在汽车电子体系中经历过一轮完整演进。
尤其是EE架构与车载网络,从传统分布式ECU走向软件定义+区域架构(Zonal)+中央计算,已经为机器人提供了一套成熟的“系统骨架”。
◎ 在电源侧,48V配电、冗余设计和Fail-operational理念,天然契合机器人对高功率密度和连续运行的要求;
◎ 在通信侧,以以太网为核心的车载网络(含TSN)提供确定性时延与高带宽,成为跨关节、跨域协同的基础设施。
这意味着,机器人产业可以直接站在汽车产业十年架构演进的“肩膀”上,加速工程化落地。

人形机器人架构,可以看到一个非常典型的“车规思路”:中央计算 + 模块化域控制。
◎ 中央计算单元(CCU)以1–2kHz刷新率运行,负责感知融合、运动规划、SLAM、全身协调与逆运动学,对应汽车中的中央计算平台;
◎ 而各关节或功能域(手、肘、髋、膝等)则以1–10kHz高频运行本地控制与“反射”。

区域控制器或执行域控制,强调低延迟闭环。通信层采用EtherCAT、GigE+TSN,以及10Base-T1S、CAN-FD等组合,实现从高带宽主干到低速执行网络的分层设计。
中央负责“思考”,边缘负责“动作”,既保证全局最优,又兼顾实时性,汽车以太网的引入(1/2.5/5/10Gbps甚至25Gbps链路)带来带宽和时延优势,还通过标准化接口和规模效应降低成本,保证质量与功能安全。
这一套体系正在把机器人从“实验室系统”,推向“可规模复制的工业产品”。
Part 2
在人形机器人关节驱动上,从分立到高度集成,是一条从灵活性到系统效率的权衡曲线。
以一个典型人形机器人为例,总计约 56个电机。
◎ 手部:30个电机(五指高自由度)
◎ 手腕:4个
◎ 手肘:4个
◎ 肩部:6个
◎ 下肢(髋、膝、踝):10+
◎ 躯干、颈部等:若干
每一个电机是一个完整的“控制单元”,包括:
◎ 功率驱动(MOSFET / GaN)
◎ MCU 控制
◎ 传感(位置、力矩)
◎ 通信接口和保护机制

● 关节驱动
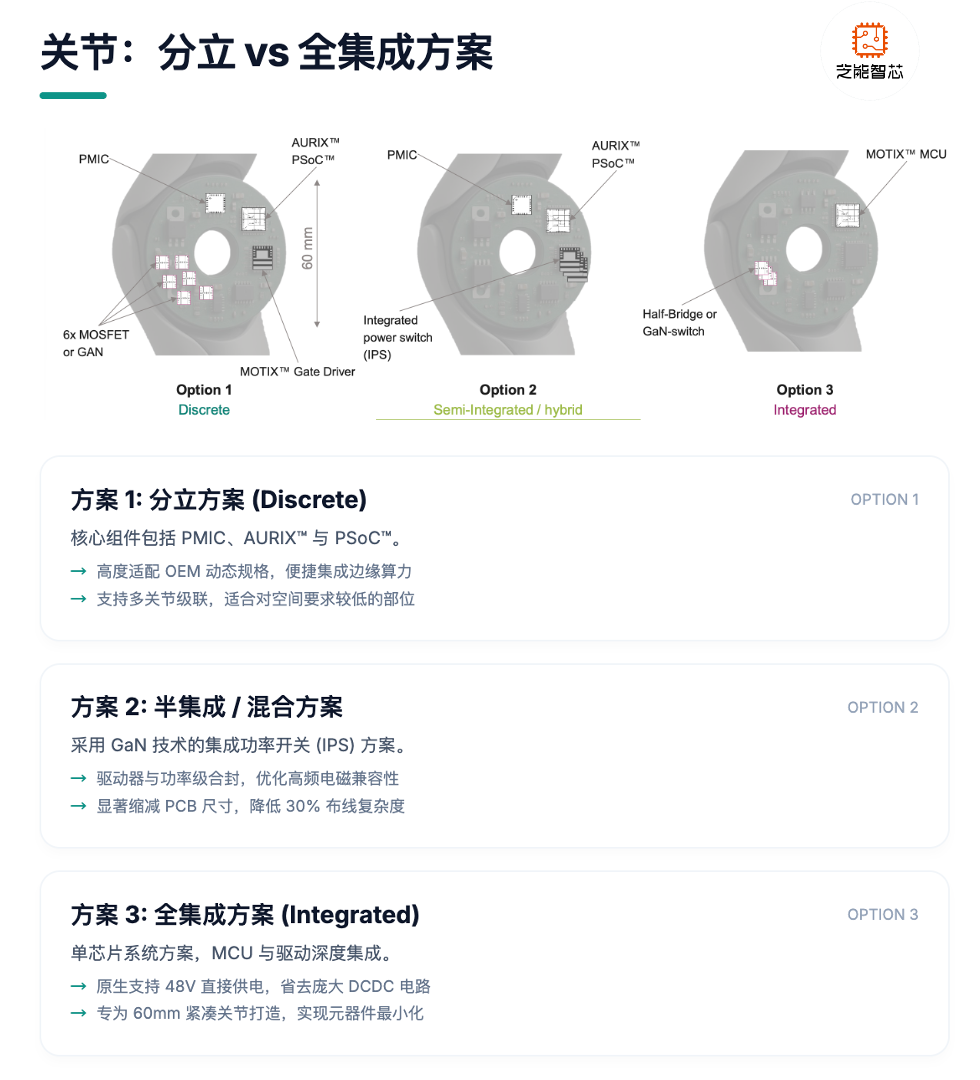
◎ 分立方案(PMIC + AURIX + PSoC + 外置MOSFET/GaN + Gate Driver)最大的优势是架构弹性强,便于应对OEM需求变化,也更容易扩展算力(例如引入Edge AI)以及多关节驱动,但代价是PCB面积大、布线复杂、功率与控制分离导致系统设计难度高。
◎ 半集成/混合方案通过将功率级与驱动(如IPS或GaN Half-Bridge)进行耦合,把功率器件与Gate Driver靠拢,显著降低外围复杂度和PCB占用,在性能与工程实现之间取得平衡,但灵活性开始下降。
◎ 进一步走向全集成方案(如将MCU+Gate Driver甚至部分电源集成在单芯片中),可以实现48V直供、极大减少外部器件,尺寸做到最小,同时通过选择不同MOSFET/GaN实现功率等级扩展,但系统可调性明显收敛,更偏标准化模块设计。

在灵巧手(高自由度执行器)层面,这种架构演进更加明显:
◎ 集中式分立方案通常以域控制器(如AURIX)+外置驱动+MOSFET为核心,适合低DOF或夹爪类应用,但空间效率差;
◎ 混合方案引入IPM或半桥/三相桥,将多个中等算力MCU分布在手掌区域驱动2-4个电机,在性能与集成度之间折中;
◎ 而面向高DOF的单体/去中心化方案,则将控制、驱动与功率级直接嵌入每个关节甚至电机内部,PCB尺寸可缩小到10–12mm级别,实现真正的“关节级智能”,同时通过分布式散热降低热密度,并减少机械传动复杂度。
这一趋势与汽车电子从域控走向区域控制类似:从集中计算到分布式执行,最终实现系统级最优。
从产业角度来看,机器人真正的瓶颈是工程化与规模化能力,而这正是汽车行业最擅长的部分。
汽车产业具备完整的供应链体系,包括芯片、电机、功率器件与通信模块,并通过百万级量产形成极强的成本控制能力,标准化接口与成熟的开发流程,使复杂系统能够高效落地。机器人行业目前仍面临标准缺失、成本高昂、系统复杂度难以工程化等问题。
因此,机器人产业正在主动“借用”汽车产业的能力,机器人正在演变为类似“软件定义汽车”的新形态:具备中央计算平台、多传感器系统、高密度执行网络以及电池供能体系,是一个可移动的智能终端。