从手机 Face ID、刷脸支付,到智能机器人,主动3D视觉技术正在快速进入日常生活,但当3D相机进入水下场景后,原本稳定的感知能力却会大幅下降,甚至“失效”。
问题并不在于算法,而在于水对光传播的天然限制。对于机器人而言,要在水下实现主动3D感知,核心前提是需要一个稳定地在水中投射激光点阵的发射器,这也长期被认为是水下主动视觉领域最难突破的关键技术之一。
近日,光鉴科技正式发布行业首发水下点阵蓝光方案,并推出水下主动双目视觉产品PISCA 1000,为水下机器人带来全新的主动 3D 感知方案。

水下环境,重新定义了“可用光”
水对不同波长光线的吸收能力存在显著差异。当前主流消费级 3D 相机大多采用940nm红外光方案,这类技术在陆地场景已经非常成熟,但在水下却是表现最差的波长之一。940nm 红外光进入水中后会快速衰减,有效穿透距离仅有几厘米,难以满足机器人对空间感知、障碍识别与环境建图的需求。
相比之下,400–550nm波段的蓝绿光则具备更强的水下传播能力,有效探测距离可提升至数十米。因此,传统为陆地环境设计的红外 3D视觉方案,很难直接迁移到水下场景,而水下机器人若想实现稳定、可靠地主动感知,必须从光源层面重新设计。

难点不在方向,而在产业化能力
事实上,行业对于“水下需要蓝绿光”早已形成共识,但真正困难的并不是技术方向,而是缺少成熟、稳定且具备量产能力的核心器件。目前消费电子中广泛使用的点阵投射器,主要依赖GaAs 材料的940nm VCSEL 激光器阵列,其产业链已经非常成熟。但如果切换到蓝绿波段,则必须采用GaN材料体系。
由于工艺复杂、效率受限等原因,蓝绿 VCSEL 阵列至今仍未实现成熟产业化,长期面临输出功率低、成本高以及稳定性受限等问题,仍主要停留在小批量送样和实验室验证阶段,难以满足机器人产业对于规模化、稳定化应用的需求。这也导致之前的水下蓝光方案,大多只能实现单点发射,而真正意义上的主动点阵投射,则长期缺乏量产落地方案。
光鉴科技的答案:绕开器件限制,重构水下投射方案
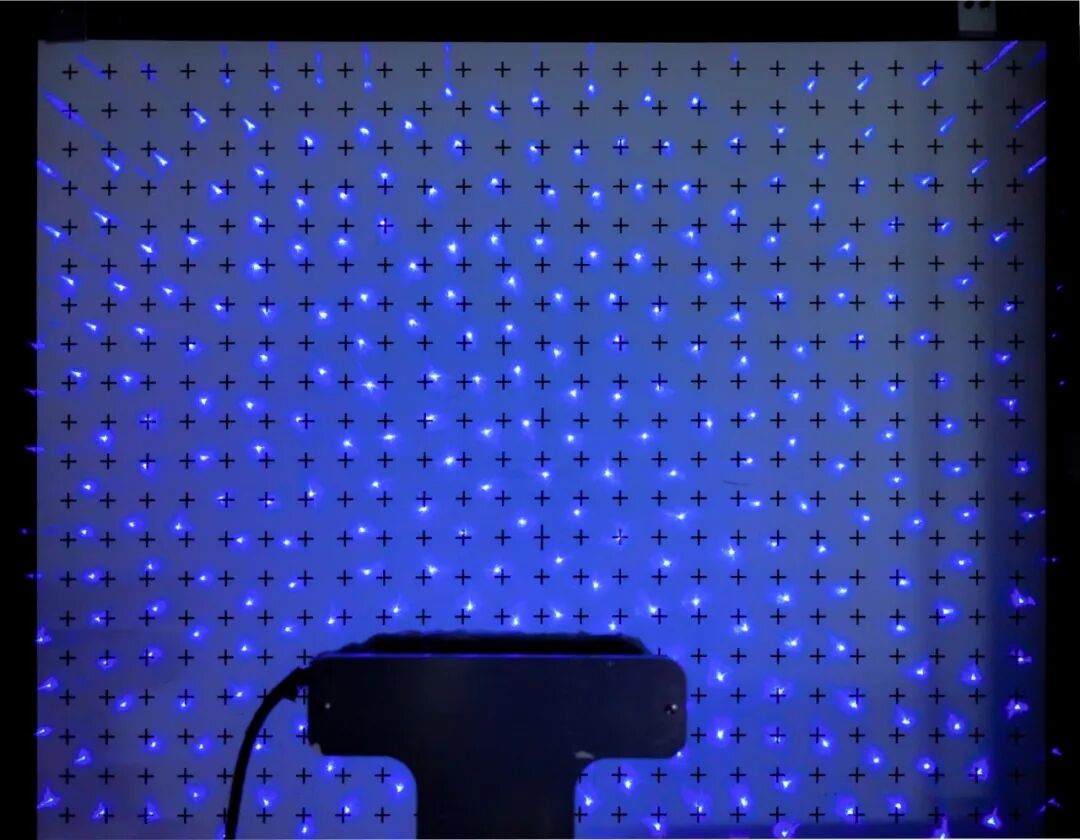
面对这一难题,光鉴科技并未沿用传统VCSEL阵列路线,而是基于成熟的 GaN边发射蓝绿激光器,结合自研WFP波前调制芯片,构建了全新的水下点阵蓝光方案。

其中,GaN 边发射激光器已经在激光显示、激光投影等领域实现大规模量产,具备稳定性高、性能可靠以及成本可控等优势。光鉴科技自研的WFP波前调制芯片,则能够对单颗激光器输出波前进行精密调制,实现散斑点阵的灵活生成与稳定投射。
相比传统路线,该方案无需依赖尚未成熟的蓝绿VCSEL阵列,在器件成熟度、系统稳定性以及量产可行性等方面具备明显优势,为水下主动视觉提供了一条新的产业化路径。
PISCA 1000:让机器人在水下看见三维世界
基于水下点阵蓝光技术,光鉴科技正式推出PISCA 1000,实现水下主动双目视觉3D成像。PISCA 1000可在3-100,000 Lux照度范围内稳定工作,感知距离可达3米以上,能够满足不同的水下复杂场景需求。相较于成本更高的蓝绿激光雷达路线,“点阵投射+双目视觉”的方案,也在感知精度、系统成本与量产能力之间取得了更优平衡,更适合机器人行业的大规模应用。

除了主动感知能力外,PISCA 1000在水下三维建图方面同样表现优异。以下图的泳池场景为例,其重建图像能够完整呈现池壁轮廓、池底结构以及浅水区与深水区之间的坡面过渡,其中池壁边界连续闭合,池底纹理清晰可见,整体空间结构完整、几何关系准确,能够真实还原环境特征。
PISCA 1000泳池三维建图效果图
相比传统线激光雷达只能获取单线剖面信息、难以表达连续曲面和复杂结构,PISCA 1000可直接获取丰富的三维空间数据,不仅能够识别环境边界,还能够感知表面形态、高度变化和空间细节,从而构建更加完整、精确的三维地图,为定位导航、路径规划、环境感知提供更加可靠的地图基础。
在实际应用中,泳池清洁机器人可以主动识别池壁、台阶、坡面与障碍物,减少碰撞并优化路径规划;在水下巡检、水产养殖、水下作业等场景中,也将使机器人首次具备稳定、低成本的三维环境感知能力。
从陆地到水下,重新定义机器人视觉边界
长期以来,受限于核心器件与技术路线,水下主动视觉始终缺少真正成熟的产业化方案。此次水下点阵蓝光方案的发布,不仅意味着光鉴科技在主动 3D 视觉领域实现新的技术突破,也为水下机器人行业提供了更具落地价值的感知方案。
从陆地到水下,光鉴科技不断拓展3D视觉的应用边界,让机器人在更多环境中真拥有可靠、稳定的空间感知能力。