精细操作是具身智能迈向真实物理世界的关键能力,但现有评测往往只用 “成功 / 失败” 的二元指标衡量机器人表现,容易掩盖其在语义理解、精细感知和稳定执行中的真实短板。
针对这一问题,东南大学魏秀参教授、耿新教授和北京大学彭宇新教授团队提出精细操作元评测基座 MetaFine,从 understanding、perception 和 behavior 三个维度系统诊断具身智能体的操作能力。MetaFine 不仅能够揭示传统成功率指标下被高估的能力幻象,还可兼容吸收不同机器人评测集,并通过真机 - 仿真混合评测辅助获得更稳定、更公平的真实能力估计。
该工作推动精细操作评测从 “是否成功” 的结果排名,走向 “为何成功、为何失败” 的能力诊断,为构建真正可靠、灵巧、可泛化的具身智能系统提供了新的评测基础设施。
论文标题: Beyond Binary Success: A Diagnostic Meta-Evaluation Framework for Fine-Grained Manipulation
论文链接:https://arxiv.org/abs/2605.19986
项目主页:https://metafine.github.io/
对人类来说,很多精细动作几乎是不假思索的:把一枚钥匙插入锁孔、把一个字母块放入对应凹槽、抓住杯子的把手、按下开关的指定位置。这些动作看似简单,却蕴含着高度复杂的理解、感知与控制协同。
但对具身智能体而言,这类任务远不只是 “把物体移动到某处”。真正的精细操作要求智能体知道该操作什么部位,看清局部结构与空间关系,并执行稳定且满足物理约束的动作轨迹。也就是说,机器人不仅要 “动起来”,更要 “动得对、看得准、做得稳”。
这正是该团队提出 MetaFine 的出发点:当具身智能从粗粒度搬运走向真实世界中的精细操作,现有评测体系是否还能准确衡量机器人的真实能力?
机器人真会精细操作吗?
过去几年,随着视觉 - 语言 - 动作模型(Vision-Language-Action Models, VLAs)的快速发展,机器人在抓取、移动、放置等任务中取得了令人瞩目的进展。在很多 benchmark 上,模型甚至可以报告非常高的成功率。
然而,高成功率是否意味着机器人真正掌握了精细操作能力?
答案并不一定。
以一个简单的字母块拼装任务为例:如果要把缺失的字母插入 “METAFINE” 中的正确位置,机器人至少需要同时完成三件事。
第一,它要理解(understanding)任务语义:当前缺失的目标是哪个字母?
第二,它要感知(perception)局部结构:正确的字母块在哪里?对应的槽位在哪里?
第三,它要稳定执行动作(behavior):如何插入而不碰撞、不偏移、不扰乱相邻字母?
这不是一个极限精度展示,而是一个最小化的结构性示例:只要理解、感知或执行中的任意一环失败,整个任务就会失败。
这也说明,精细操作的核心难点并不只是 “误差更小”,而是能力结构更加脆弱。粗粒度任务中,机器人可能依靠全局场景信息和近似动作完成目标;而在精细操作中,局部属性、空间细节和动作约束缺一不可。

成功率很高,为何仍不可靠?
当前许多机器人评测仍然依赖一种非常简单的指标:成功或失败。
如果物体被拿起来,就算成功;如果按钮被触发,就算成功;如果目标状态达成,就算成功。
但问题在于,这样的二元成功率无法回答一个更关键的问题:机器人究竟为什么成功,又为什么失败?
一个机器人可能抓起了杯子,但并没有抓住杯柄;
一个模型可能完成了旋转任务,但方向和约束并不正确;
两个模型可能都有 80% 的成功率,但一个在光照变化下迅速崩溃,另一个虽然轨迹平滑却抓错了部位。
在传统评测中,这些差异往往被压缩成同一个数字。看似相似的成功率背后,可能隐藏着完全不同的能力结构。
这正是所谓的成功率幻象:模型看起来 “会做”,但并不一定真正具备可泛化、可解释、可复现的精细操作能力。

MetaFine:从二元成功率到三维能力诊断
为了解决这一问题,该团队提出了 MetaFine:一个面向精细操作的诊断式元评测框架。
MetaFine 的核心思想是:不再只问机器人 “是否成功”,而是进一步追问 ——
它是否真正理解了任务?
它是否看清了关键局部结构?
它是否稳定完成了受约束的动作?
因此,MetaFine 将精细操作能力拆解为三个维度:
1. Understanding:是否真正理解任务语义?
MetaFine 通过受控语义干预来测试模型是否真正理解指令。例如,场景保持不变,但指令从 “抓住瓶盖” 改成 “抓住瓶身”。如果模型真正理解了属性级语言,它应该能够根据新指令重新定位目标部位。
2. Perception:是否具备高保真的局部空间感知?
精细操作往往依赖局部结构,例如插孔、按钮、把手、旋转方向等。MetaFine 通过视角变化、光照变化等扰动,评估模型在真实物理环境变化下是否仍能准确感知关键区域。
3. Behavior:是否能稳定执行受约束动作?
MetaFine 不仅看最终是否完成任务,还会将长程任务拆解为多个阶段,例如抓取、对齐、插入,并分析每个阶段的成功率和轨迹平滑性,从而诊断失败到底发生在动作执行的哪个环节。
这意味着,MetaFine 不再把机器人能力压缩为一个单一分数,而是给出一张更清晰的能力画像。

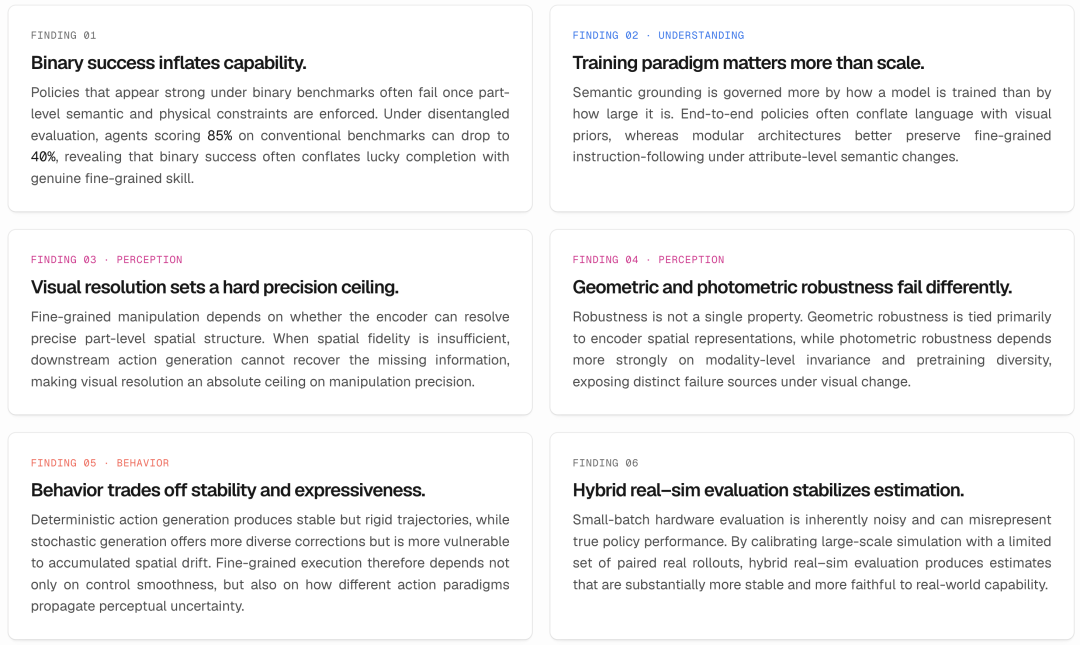
发现一:传统评测可能显著高估机器人能力
在传统粗粒度评测中,许多机器人策略可能表现出很高的成功率,甚至给人一种 “接近人类水平” 的印象。
但当 MetaFine 引入部位级、方向级和约束级的精细要求后,这种能力幻象迅速被打破。
实验表明,现有评测可能将精细操作能力最高高估达 70%。也就是说,很多看似成功的动作,在更严格的精细约束下并不能真正成立。
例如,在普通抓取评测中,只要物体被拿起来,就可能被判定为成功;但在 MetaFine 中,机器人必须抓住指定部位,满足正确的物理和语义约束。这样的评测更接近真实世界对精细操作的要求。
这说明,传统成功率指标并不是完全无用,而是远远不够。它只能说明 “结果是否达成”,却无法说明 “能力是否可靠”。
发现二:失败不是一种,而是分层发生的
MetaFine 的价值不仅在于指出模型 “不够好”,更在于指出模型到底哪里不够好。
在实验中,该团队系统评测了多种代表性的视觉 - 语言 - 动作模型和机器人策略,覆盖不同视觉编码器、动作生成方式以及语言 - 动作耦合机制。结果发现,现有模型的失败并不是单一类型,而是发生在不同能力层面。
理解层:模型可能并没有真正听懂指令
在属性级语义干预实验中,当改变指令中的目标部位时,多个模型无法根据新指令重新调整行为。这说明它们表面上的 “指令跟随” 能力,可能更多来自训练中形成的场景 - 动作相关性,而不是真正把语言作为精确的空间约束。
换句话说,模型可能并不是听懂了 “该抓哪里”,而是记住了 “这个场景通常该怎么做”。
感知层:精细操作的瓶颈常常在 “眼睛”
在精细操作中,如果视觉前端已经丢失了关键局部空间信息,下游动作模块很难再补回来。实验发现,视觉编码器保持局部空间结构的能力,会直接影响精细操作上限。
更重要的是,通过提升视觉编码器的空间保真度,在不修改下游策略的情况下,模型可以解锁此前无法完成的操作能力。这说明,精细操作的瓶颈并不总在 “手”,很多时候在 “眼”。
行为层:稳定与灵活之间存在权衡
动作生成也存在复杂的结构性矛盾。
确定性动作生成方法往往可以产生稳定轨迹,但容易陷入僵化重复的失败模式;随机生成方法具备更丰富的动作表达能力,但在感知不确定时可能产生空间漂移,导致多步误差累积。
因此,精细操作中的动作生成不能脱离感知质量单独设计。未来的具身智能系统需要更好地在稳定性与表达能力之间进行动态平衡。
不只是 Benchmark:MetaFine 是一个元评测基座
MetaFine 并不只是又一个孤立的机器人 benchmark。
该团队更希望它成为一个可扩展、可维护、可持续演进的精细操作元评测基座。
为此,MetaFine 基于组合式任务图构建评测任务。任务图中的节点表示原子技能(atomic fine-grained skills),例如抓取部位、对齐、插入、按压、旋转等;边表示技能之间的依赖关系;不同路径可以组合出不同复杂度的精细操作任务。
这种设计带来了一个重要优势:MetaFine 可以兼容并吸收外部已有 benchmark,将它们统一映射到 understanding、perception 和 behavior 三维诊断空间中。
也就是说,MetaFine 的目标不是制造另一个排行榜,而是为不同评测任务、不同模型结果和不同实验平台之间建立一个共同语言。
这对于具身智能社区非常重要。因为只有当不同 benchmark 之间的结果能够被统一解释,才能真正判断模型进步来自哪里,瓶颈又在哪里。

连接真机与仿真:迈向公平可复现的真实评测
真实机器人评测是最有说服力的,但它也面临两个长期难题。
第一,真机实验成本高、速度慢,很难大规模测试。
第二,不同实验室的硬件、场景和操作条件不同,结果难以直接比较。
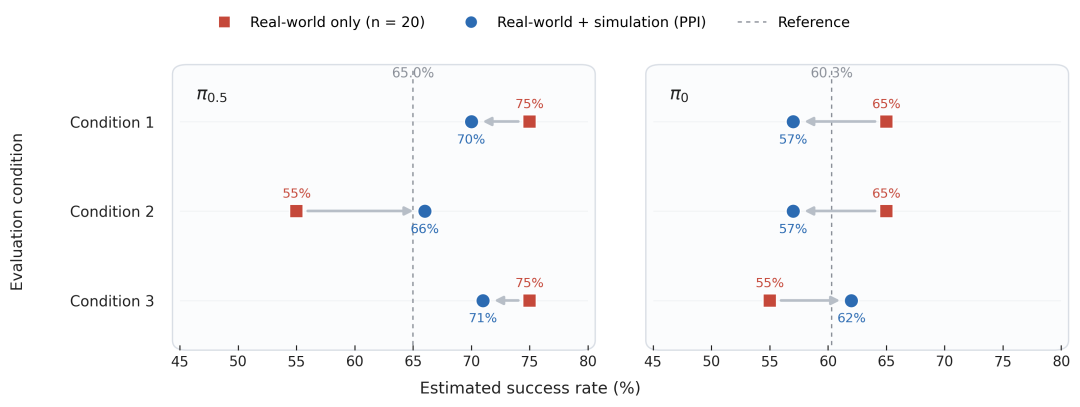
MetaFine 尝试通过真机 - 仿真混合评测来缓解这一问题。
具体来说,研究者可以将真实场景重建到仿真环境中,在仿真中进行大规模测试,再用少量配对真机实验进行校准。这样既利用了仿真的规模优势,也保留了真机实验的物理可信度。
这意味着,在有限真机预算下,MetaFine 可以帮助研究者获得更稳定、更接近真实能力的性能估计,也为跨实验室的公平评测提供了新的可能。
为什么这件事重要?
对于具身智能而言,评测不是一个附属环节,而是推动模型进步的基础设施。
如果评测只奖励 “看起来成功”,模型就会倾向于学习粗糙但有效的捷径;如果评测能够指出 “为什么失败”,研究者才能针对性地改进语言理解、视觉感知或动作控制。
MetaFine 的意义正在于此:它把精细操作评测从 “结果排名” 推进到 “能力诊断”。
对模型设计者来说,MetaFine 可以帮助判断瓶颈到底在语言、视觉还是动作生成;
对 benchmark 建设者来说,MetaFine 提供了一种可组合、可扩展的任务组织方式;
对真实机器人部署来说,MetaFine 提供了连接仿真和真机的稳定评测路径。
更长远地看,精细操作是具身智能走向真实物理世界不可绕开的门槛。只有当机器人能够理解局部语义、感知局部结构,并稳定执行受约束动作时,它才可能真正走出实验室,进入复杂的人类环境。
从 “是否成功” 到 “为何失败”
过去的许多机器人评测,主要回答的是:模型是否完成了任务。
而 MetaFine 想进一步回答:模型为什么成功?为什么失败?失败发生在理解、感知还是行为控制?
这是一种评测范式的转变。
从 binary success 到 diagnostic evaluation,MetaFine 希望帮助社区刺破表面成功率背后的能力幻象,重新衡量具身智能的 “真灵巧”。
只有当精细操作能力能够被准确测量,可靠、可泛化、可解释的物理智能系统才有可能被真正构建起来。

© THE END
转载请联系本公众号获得授权
投稿或寻求报道:liyazhou@jiqizhixin.com










