刁海文现为南洋理工大学博士后研究员,主要从事原生多模态大模型、理解生成一体化及具身智能等方向研究,相关工作包括 EVE系列、NEO系列 与 DynamicVLA 等研究。其合作导师刘子纬为南洋理工大学计算机与数据科学学院副教授,长期聚焦于多模态学习、生成式人工智能及 3D 视觉等方向研究。本工作同时与商汤研究院、大连理工大学等机构合作完成。
当前多模态大模型都在图像「进门」前
就被压缩了
今天几乎所有主流视觉语言模型(VLM)—— 无论是 Qwen-VL、InternVL,还是 LLaVA 系列 —— 都遵循着同一套经典架构:先用预训练视觉编码器(如 CLIP、SigLIP)将图像压缩为特征,再通过投影层把这些特征送入大语言模型。
这套「视觉编码器 + 投影层 + 大模型」的模块化范式非常成功,但也有一个天然前提:视觉信息在进入推理之前,就已经被压缩和过滤,一部分细节不可避免地丢失了。
NEO-ov 想挑战的正是这一假设:如果直接抛开视觉编码器,让模型从原始像素一路学到语言,会怎么样?
答案是:不仅可行,而且效果出色。在细粒度感知和空间理解等任务上,NEO-ov 甚至超过了不少依赖视觉编码器的强模型,展现出端到端视觉语言建模的潜力。

论文标题:From Pixels to Words – Towards Native One-Vision Models at Scale
团队:南洋理工大学 S-Lab、商汤研究院、大连理工大学
论文:https://arxiv.org/abs/2605.28820
代码:https://github.com/EvolvingLMMs-Lab/NEO
「编码器 + 大模型」的老办法
不灵活、不省钱、不好扩
论文将传统「视觉编码器 + 大模型」范式的局限概括为三个方面:
灵活性不足。 图像编码器擅长静态图像,却缺乏时序建模能力;视频编码器强调时间动态,又难以兼顾单图和图文交错输入。无论哪一种,都很难在浅层实现视觉与语言的充分交互,更难统一处理单图、多图和视频等不同模态。
效率受限。 视觉与语言模块彼此解耦,训练和优化过程被割裂,还需要额外承担跨模态对齐的成本。面对超长视频或超高分辨率输入时,视觉编码器的计算开销急剧增加,同时无法利用 KV Cache,对流式、实时视频理解并不友好。
扩展困难。 模块化设计要求在视觉编码器和语言模型之间不断权衡参数规模与算力分配,使得模型缩放、训练优化和部署都受到额外约束。
NEO-ov 扔掉编码器
让像素直接进大模型

NEO-ov 的核心理念可以浓缩成一句话:没有外部编码器、没有适配器、没有事后融合 —— 视觉感知、时序建模和跨模态对齐,全部在同一个统一骨架中端到端学习。它建立在前作 NEO 的基础上,将原生视觉语言建模从单图扩展到单图、多图、视频乃至空间智能任务,形成了一套统一框架。其中有几个关键设计值得关注。

「时间 + 高 + 宽」解耦,同时建模时序和空间
这是模型能够「统一时空」的关键。它将注意力头的维度显式拆分为三部分:
T(时间)分支:继承自原始大语言模型,负责建模文本顺序、跨图关系以及跨帧依赖; H、W(空间)分支:新增的二维空间维度,专门刻画图像内部的空间结构与位置关系。
单元内部:视觉 token 之间采用双向注意力,充分建模图像内部的空间结构; 单元之间:保持自回归(因果)机制,每个单元都能访问其之前出现的所有文本和视觉 token。
循序渐进的三阶段喂数据
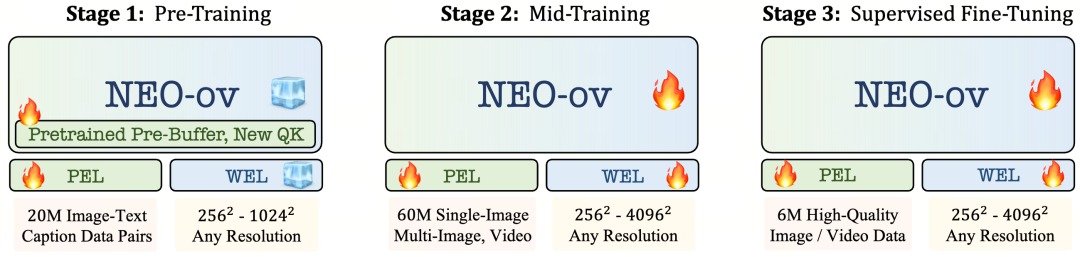
NEO-ov 采用循序渐进的三阶段训练方案,数据规模、分辨率和任务复杂度逐步提升:
阶段一|预训练:使用约 2000 万图文对(包含大量描述性字幕和 OCR 数据),仅训练视觉相关新增模块,先将视觉表征对齐到语言空间,同时尽量保留原有语言能力。
阶段二|中期训练:使用近 6000 万多模态样本,图像分辨率从 256² 提升至 4096²,视频最长扩展到 128 帧;全部参数联合优化,上下文长度从 16K 增至 36K,重点强化高分辨率感知和时空推理能力。
阶段三|监督微调:使用约 600 万高质量指令数据(单图、多图和视频),覆盖视觉问答、OCR、细粒度感知、时序推理、数学分析和复杂对话等任务,进一步提升综合能力。
单图和视频有竞争力
空间智能反超「专用模型」

图像理解:原生 VLM 的新 SOTA。在 2B 和 9B 两个规模上,NEO-ov 都刷新了原生 VLM 的性能上限,全面超过 EVE、Mono-InternVL、OneCAT、SAIL 等同类工作,在 MMMU、HallusionBench、InfoVQA 等强调推理能力和抗幻觉能力的基准上优势尤为明显。更值得关注的是,在完全不依赖预训练视觉编码器的情况下,NEO-ov 依然能够在多个感知与推理基准上追平甚至超过 InternVL3.5、Qwen3-VL 等顶尖模块化模型,证明了端到端原生架构同样具备竞争最强 VLM 的潜力。

多图与视频理解:原生架构首次具备与主流 VLM 正面竞争的实力。相比 Fuyu、EVE、ELVA 等此前的原生模型,NEO-ov 在 VideoMME、MVBench、MLVU 等视频基准上实现了大幅领先,展现出强劲的时序推理和长上下文理解能力。更重要的是,在 BLINK、MUIRBench、LongVideoBench 等多图与长视频任务上,NEO-ov 已经能够与 VideoLLaMA3、InternVL3.5 等顶尖模块化模型正面竞争。这表明原生架构不仅能做好单图理解,也具备了处理复杂时空信息的能力。

空间智能:NEO-ov 最亮眼的突破。作为一个通用原生模型,NEO-ov 在几何推理、空间感知和具身理解等空间智能任务上,已经达到甚至超过 Cambrian-S、Sensenova-SI、GeoThinker 等专门设计的模型。在 ViewSpatial、3DSR、SPAR 等基准上,它相较其他通用 VLM 也展现出明显优势。这表明 NEO-ov 的优势不仅体现在感知和推理能力上,更体现在对空间关系和三维结构的理解能力上。
拆开看:为什么原生架构在空间任务上更占便宜
原生注意力优于视觉编码器:在公平对比下,NEO-ov 的 Pre-Buffer 机制在 OCR 和空间智能任务上明显优于传统视觉编码器,说明保留更丰富的「像素 - 像素」和「像素 - 词」交互,比依赖压缩后的视觉表征更有效。 浅层交互更有利于空间智能:在相同空间智能数据上微调时,NEO-ov 的提升幅度显著大于 InternVL3.5、Qwen3-VL 等编码器模型,表明跨模态交互越早发生,对空间推理越有帮助。 渐进式训练持续有效:从预训练到中期训练,2B 和 9B 两个版本的性能都稳定提升,其中小模型收益尤为明显。
还有哪些没做好:
OCR、文档,以及和顶级模型的差距
论文也没有回避短板: NEO-ov 目前在部分单图和视频基准上,它与 Qwen3-VL 等模型仍有差距,这可能与训练数据的规模和质量有关。OCR 和文档理解也是一个相对明显的短板:相比模块化模型,NEO-ov 缺少专门针对 OCR 的预训练,因此在这类任务上表现不够突出。换句话说,原生多模态建模的优势已经开始显现,但远没有到达上限。后续如果能继续扩大模型规模、丰富训练数据,并加强长上下文训练,这一路线仍有很大的提升空间。
它真正想说的:
不靠拼装,多模态智能也能自己「长」出来
NEO-ov 想传达的,其实是一个关于多模态智能来源的判断:多模态智能未必只能来自精心设计的视觉编码器、适配器和融合模块,也可能从一个原生、统一、端到端的架构中自然涌现。
实验表明,完全摆脱视觉编码器的原生视觉语言模型不仅可行,而且在规模化之后已经具备与顶尖模块化系统竞争的实力。对这条技术路线而言,NEO-ov 或许还不是终点,但无疑是一块重要的进展。它让「原生统一的视觉基础模型」从一个理想,变成了一条正在被验证的现实路径。

© THE END
转载请联系本公众号获得授权
投稿或寻求报道:liyazhou@jiqizhixin.com