HandBot-S1是一款三维空间扫描仪,集成了3D激光雷达、双目相机、IMU、算力模块、通讯模块、电池等,并提供标定好的内外参数,免去用户硬件组装、配置、标定等麻烦,通过连接网络即可开始各种应用。HandBot-S1可用于数据采集、环境重建、机器人导航等应用。
一 产品采购渠道

二 HandBot-S1版本说明
2.配套视频使用教程 3.配套多模态融合SLAM课程 4.一年答疑服务 | ||
2.配套视频使用教程 3.配套多模态融合SLAM课程 4.相机内参和激光雷达外参标定视频教程 5.一年答疑服务 |
三 两种扫描仪使用方式
3.1 手持模式
手持模式下,可以进行数据采集、环境重建。产品外观展示:

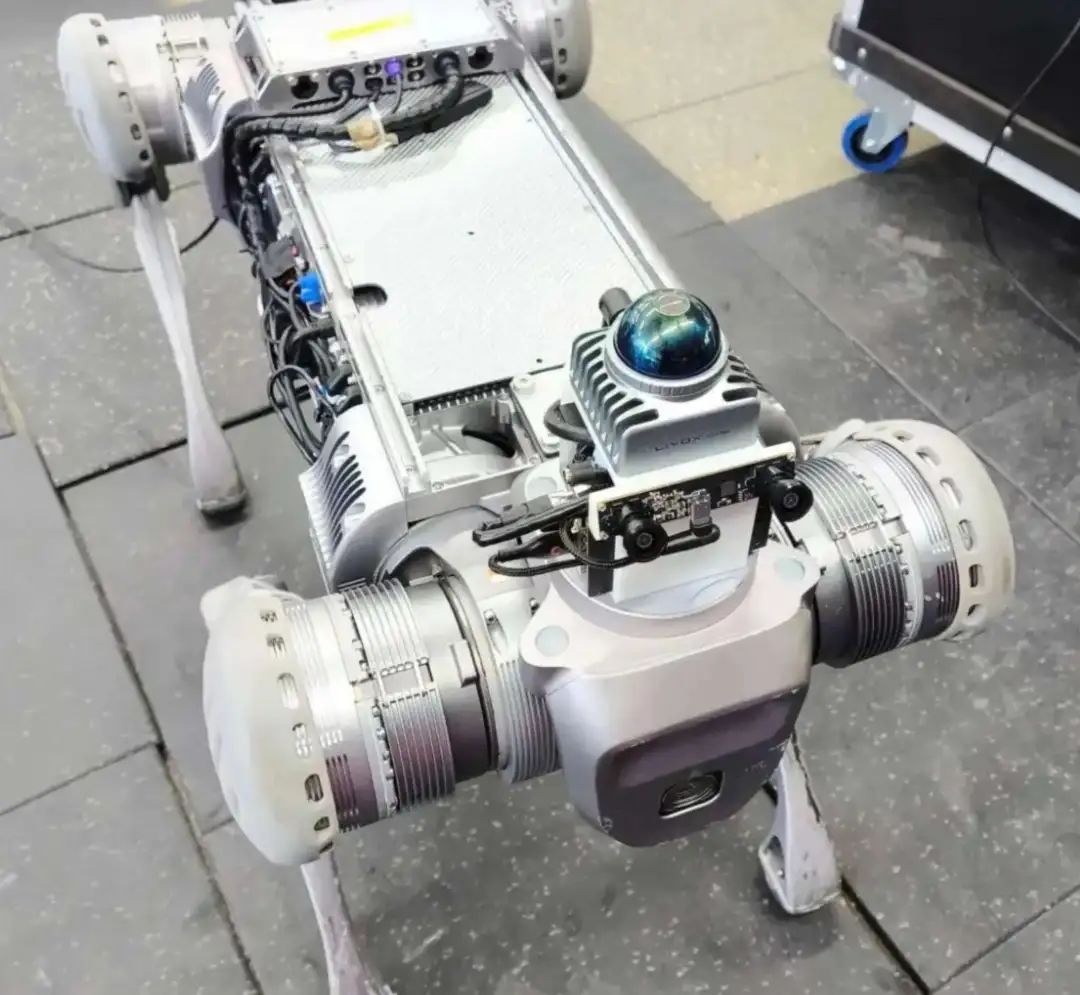
3.2 负载模式
扫描仪主体和手持底座通过4颗螺丝连接,去掉手持底座后,扫描仪主体可直接搭载到轮式机器人、足式机器人、无人机等多种机器人平台,扫描仪的SLAM算法使得机器人具备建图和定位的能力,仅需要连接一根网线即可获取扫描仪的传感器数据、实时位姿数据、地图数据。实际效果如下:



另外使用者可以将路径规划算法部署到扫描仪的算力主板上,使得机器人具备完整的定位导航的功能。
四 产品特色
HandBot-S1是一款支持开源算法运行的三维空间扫描仪,包括:硬件算力开源、数据开源。使用者可以基于HandBot-S1进行算法研究、二次开发、以及各种扩展应用。
HandBot-S1可以运行激光SLAM、视觉SLAM、激光视觉融合SLAM等各种开源算法,目前提供的适配算法,在工作空间目录下catkin_make编译后即可运行:
FAST_LIO2 FAST_LIO DLO LOAM-LIVOX LIVOX-LIO VINS-Fusion ORB-SLAM3 FAST_LIVO2(已提前部署编译,用户修改config参数后,可直接运行)
其他开源的SLAM算法也可以很方便的运行在该设备上,使用者可以自行适配和测试。
开源SLAM算法在HandBot-S1中编译运行教程,比如:Fast-Livo2在HandBot-S1中运行成功
此外,HandBot-S1默认内置SLAM算法(该部分算法暂不开源),具备实时建图、保存地图、基于地图定位的功能。每个功能已经封装成脚本,使用者仅通过一行命令即可调用相应的功能。而且在建图或基于地图定位时,HandBot-S1会通过ros topic输出实时位姿和地图数据,使用者可以基于定位结果进行打点,或者进行机器人导航应用。
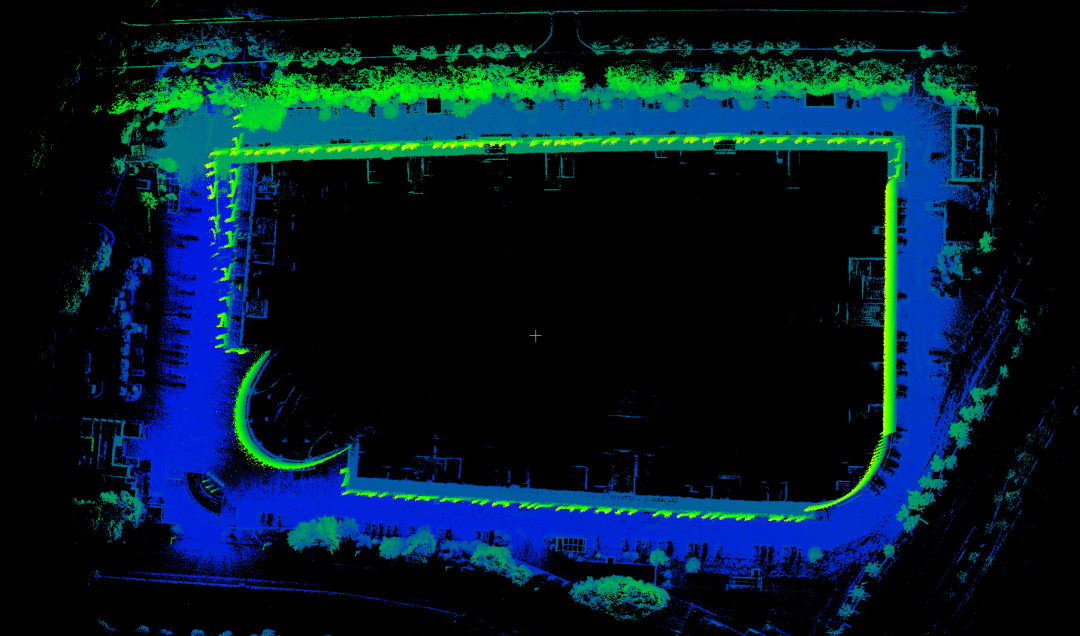
五 建图效果

六 硬件配置和技术参数
七 HandBot-S1-标准款-配套学习课程
7.1 配套激光-视觉-IMU-GPS多模态融合课程

7.2 配套零基础入门视频教程
第01章 HandBot-S1!硬件介绍
第02章 使用本设备时的注意事项
第03章 PC上的环境安装与准备
第04章 Linux常用指令
第05章 PC与HandBot-s1的连接方式
第06章 启动传感器
第07章 启动实时建图功能
第08章 实时地图保存功能
第09章 启动稠密建图功能
第10章 稠密地图保存功能
第11章 启动重定位(基于地图定位)功能
第12章 数据录制功能
第13章 播包教程
第14章 如何打开和录制单目或双目数据
第15章 HandBot-S1-支持开源代码运行
本套手持扫描仪提供详细的使用教程,方便使用者进行数据采集、算法测试、实时建图、保存地图、基于地图定位、可视化等功能的使用。并且提供教程进行硬件和算力的使用,方便使用者进行二次开发。
八 HandBot-S1-进阶款-配套学习资料
除了包含HandBot-S1-标准款配套资料,还会提供相机和激光雷达外参标定源码和使用视频教程,视频教程详情如下:
第一章 相机标定
01.AprilTag标定板的介绍
02.相机内参标定时采集图像的注意事项
03.内参标定时标定板位姿摆放动作示范
04.Kalibr安装教程
05.单双目数据的采集时的配置文件修改方法
06.单目标定数据采集实操
07.单目相机内参标定程序实践
08.双目内参标定数据采集实操
09.双目相机内参标定程序实战
第二章 相机和激光雷达外参标定
10.激光雷达外参标定时场景布置技巧
11.激光雷达驱动安装教程
12.相机和激光雷达外参标定的数据录制实操
13.相机与激光雷达标定程序实践
九 答疑服务(一年)
一年答疑服务。每个购买本产品的客户,我们将会拉一个微信答疑群,有问题可以随时群里交流。问题可以涵盖本套硬件和代码方方面面的问题。
HandBot-S1版本说明
2.配套视频使用教程 3.配套多模态融合SLAM课程 4.一年答疑服务 | ||
2.配套视频使用教程 3.配套多模态融合SLAM课程 4.相机内参和激光雷达外参标定视频教程 5.一年答疑服务 |
十 产品采购渠道