施普林格·自然旗下学术期刊《自然-通讯》最新发表一篇机械工程研究论文称,研究人员开发出一款可编程的柔性折叠薄片机器人,能抓取物体和在物体表面移动。
这项机器人研究进展,可改进自主系统在探索、触觉显示(帮助用户“感知”虚拟刺激的技术)和智能医疗等领域的应用。
该论文介绍,设计能够改变形状的机器人能实现多种应用,例如探索环境或操控物体。类似折纸的折叠变形是一种成熟的方法。但传统方法采用固定铰链结构,限制了结构配置的范围和适应性。
在本项研究中,论文共同通讯作者、韩国科学技术院Inkyu Park和Jung Kim与同事合作制作出一个机器人折叠薄片,使用密集分布的热敏电元件构成,受热可改变形状。他们用一张40平方厘米的薄片展示了这一方法,该薄片由308个兼具加热器和感受器功能的电阻构成。这种双功能使之可以实现精确控制移动,系统可根据感受器反馈作出持续调整。

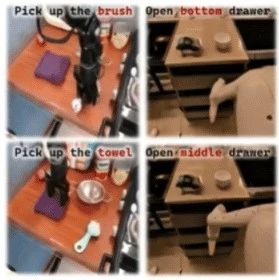
本项研究成果相关示意图(图片来自论文)。施普林格·自然 供图
论文作者通过让这款柔性的折叠薄片机器人爬行过表面,以及抓抬培养皿、塑料包装和木棍等各种物品,展示该机器人折叠薄片的灵活性。
研究表明,折叠薄片机器人可实现大范围的折叠角度,并在一定温度范围内(30°C到170°C)保持性能一致性。此外,其自主系统还能快速精确响应环境变化,以保障稳定性和效率的提升。
论文作者总结认为,这一可编程的柔性折叠薄片机器人能提升自主系统的多功能性和可适应性,使之能更有效地在不可预测的地形上发挥功能。不过,后续研究应用还需要材料技术和结构设计的进步,才能充分挖掘该技术的潜力。
精彩内容回顾