基于流体的软体机器人凭借其良好的可变形性、自恢复性与环境适应性,近年来在微尺度智能操控领域引起广泛关注。特别是磁流体液滴机器人(Ferrofluid Droplet Robots, FDR),由于兼具顺磁性与液体流动性,在外部磁场的调控下能够实现多种复杂功能,如自组装、按需分裂/融合与形态重构,展现出优异的可编程性和操作灵活性,有望为海洋微流控、实验室/器官芯片、生物医学工程等领域提供一种全新的操控范式,显著拓展微操作系统的功能边界(图1)。
相较于单体机器人系统,由多个个体组成的机器人编队不仅具备协同完成复杂任务的能力,还能显著提升系统的执行效率与任务吞吐量。此外,在个体智能受限于尺寸缩小的背景下,群体智能通过多机器人间的协作,有效弥补了单体能力的不足。然而,现有研究方法主要聚焦于全局磁场下FDR的可变形重构和多模态运动,而忽视了大规模FDR的并行控制。受制于统一的外部全局磁场驱动,如何实现对多个FDR个体的精准、差异化协同操控仍面临巨大挑战。分布式磁场通过空间中多个磁源的协同作用,在特定区域内形成空间可控、时变可调的磁场分布,具有更高的控制自由度和空间解析能力,是实现复杂磁操控系统的关键技术之一。

图1小型化机器人研究意义
▍提出创新可编程操控平台,实现大规模FDR并行控制
针对上述挑战,清华大学深圳国际研究生院曲钧天副教授团队开发了一个基于电磁线圈阵列的液滴机器人可编程操控平台。
该平台用于液滴机器人的可编程控制,能够同时操控大规模液滴机器人并行协作执行多功能操作任务。其紧凑的阵列结构可显著提升机器人的运动性能,低功耗驱动则能保障系统长时间稳定运行。结合视觉反馈策略,机器人编队可同时跟踪多个独立路径;通过灵活部署液滴机器人,该平台在数字图案显示、信息编码及流体操作等领域展现出广泛应用潜力。
为验证系统性能,研究团队开展了系列工作:建立线圈磁场模型以评估其分布特性,对液滴机器人的运动和变形行为进行表征,验证了所开发系统的驱动性能;提出基于视觉的闭环反馈控制策略,实现了多机器人编队的路径跟踪;通过往复运动测试和热分析,表明该系统凭借低输出功率可实现可靠且长期的持续运行。此外,通过部署不同数量的机器人,研究团队验证了所开发系统在数字显示、信息编码和流体操作等领域的应用潜力。

图2研究成果发表相关信息
近日,该研究成果的研究性论文已以“Development of an Electromagnetic Coil Array System for Large-Scale Ferrofluid Droplet Robots Programmable Control”为题,在国际机器人领域顶级期刊IEEE Transactions on Robotics上进行发表。
▍开发分布式磁场驱动系统,实现大规模FDR可编程操控
研究团队首先设计了一种高密度分布式电磁线圈阵列,用于在毫米尺度上实现液滴机器人大规模可编程操控。该平台集成了144个小尺寸电磁线圈,能够在113×113 mm²的工作空间内生成一系列局部磁场,从而实现多点独立驱动(图3)。
系统采用模块化供电架构,由三台直流电源提供高达36 A、400 W的总功率,驱动144个电磁线圈。每组16个线圈由一块定制驱动板调控,共配置9块驱动板。采用TB6612FNG双H桥芯片输出电流,通过PCA9685模块调节PWM信号控制电流大小,PCF8575扩展模块控制电流方向。整个系统由STM32微控制器统一协调管理,并通过Modbus协议与上位机进行通信,单个线圈工作在额定状态时,输出功率仅为0.2 W。因此,该系统支持多个线圈同步独立工作,具备高扩展性、低功耗和良好热稳定性,为FDR的快速、可编程操控提供了硬件基础。
为了对线圈产生的局部磁场进行准确可靠的评估,研究团队采用等效建模的思想,将单个电磁线圈简化为由多个同心圆环叠加而成的结构,利用Biot-Savart定律计算各圆环在空间中产生的磁感应强度分量,并通过磁场叠加原理求得整体磁场分布。同时,考虑铁芯的磁化效应,在外加电流磁场作用下,铁芯进一步被磁化,可等效为表面磁化电流,从而显著增强整体磁场强度。最终,总磁场由线圈磁场与铁芯磁场叠加而成,并通过有限元仿真对磁感应强度及其梯度分布进行验证,为FDR的运动控制与形变调节提供了精确而可靠的磁场分布依据。
研究团队进一步分析了FDR与外部磁场之间的相互作用。当线圈激活时,处于非均匀磁场中的FDR会被磁化并产生磁矩,在磁梯度力的驱动下朝磁场强度较高的区域移动。FDR的形变源于磁力与自身表面张力之间的动态平衡,表现出拉伸、分裂、融合等多种形式;当外部磁场撤除后,FDR可在表面张力的作用下恢复至原始形态。该过程具有良好的可逆性与可编程性,为实现FDR的精准操控奠定了坚实的物理基础。

图3分布式磁场驱动系统概述
▍构建离散闭环控制策略,提升FDR编队路径跟踪性能
为了实现FDR在分布式磁场作用下的可编程形态重构与独立路径跟踪,研究团队深入探究了FDR在局部磁场作用下的运动规律与变形机理,并提出了一种基于视觉反馈的离散闭环控制策略。
首先,团队系统分析了FDR的基本运动行为和变形原理(图4)。当底部线圈被激活时,FDR在外部磁场作用下被磁化,并在磁梯度力驱动下朝磁场强度更高的方向移动。在单线圈驱动模式下,FDR可在局部区域内沿八个方向灵活运动;而在多线圈的共同作用下,通过调节相邻线圈电流的方向与幅值,可以诱导液滴发生可逆分裂与合并。研究发现,当两个线圈施加方向相反的电流时,可驱动液滴产生拉伸形变;进一步调节磁场强度比并施加方向相同的电流,可精确控制分裂后的液滴体积比。实验结果表明,当磁场强度比Bₐ/Bb ≥ 0.3时,FDR可实现稳定分裂,且体积比Vₐ/Vb与磁场强度比呈线性关系。此外,如图4(f)和(g)所示,研究还揭示了液滴尺寸、电压强度与运动速度间的关系,上述发现为FDR复杂操控提供了理论基础。

图4液滴机器人运动和极端变形的机理与表征
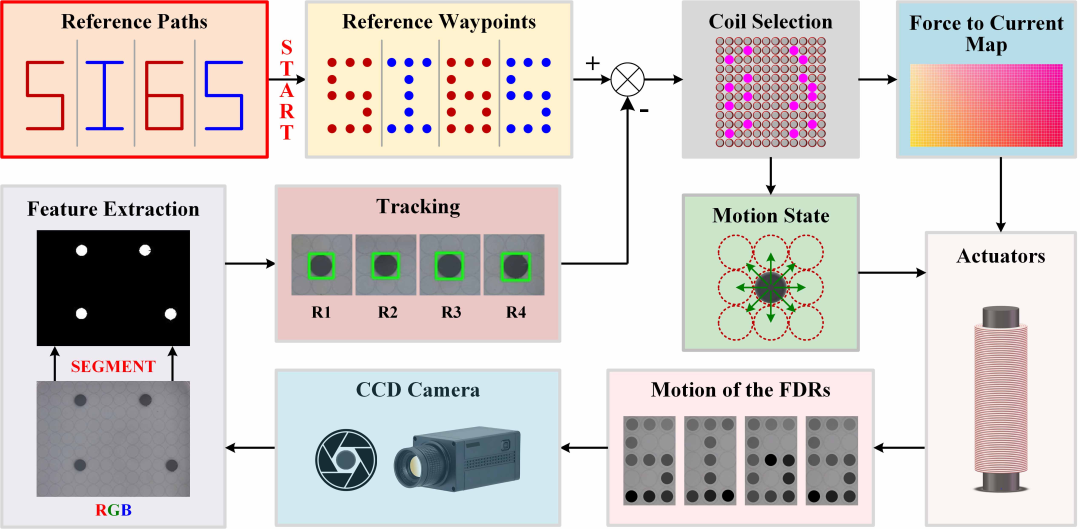
图5视觉反馈闭环控制流程图
随后,团队提出了一种基于视觉反馈的离散闭环控制策略(图5)。通过顶部CCD相机以50帧每秒的频率实时采集工作空间的图像信息,并结合OpenCV图像处理算法对FDR进行目标识别和轮廓提取,采用CSRT跟踪算法实现多个FDR的实时定位。鉴于FDR只能稳定停留在被激活线圈的中心位置,研究人员将预定义轨迹离散为“目标点”与“子目标点”,构建了基于位置误差判断的离散闭环控制逻辑,逐步激活对应线圈驱动FDR遍历子目标点。针对多FDR系统中存在的磁场耦合问题,团队进一步提出了避碰与时序规划策略。由于每个线圈的磁场能够覆盖周围八个线圈,当多个FDR在邻近区域同时运动时需要进行冲突分析。当两个FDR距离较近存在运动干扰时,则采用步进驱动方式,避免线圈激活冲突,确保各机器人独立、安全运行,提高整体运行稳定性。
▍进行系统性物理实验,验证开发系统大规模控制FDR有效
研究团队首先进行多个FDR的路径跟踪,以验证平台的驱动性能。如图6所示,部署了4个FDR分别跟踪“SIGS”和方形路径,以此验证所设计平台和控制方法对多个FDR的操纵能力。实验结果表明,实际轨迹接近期望的参考路径,沿相邻线圈运动的平均位置误差保持在0.4 mm以内,运动速度约为15.5 mm/s;沿对角线圈运动的平均位置误差保持在1.0 mm以内,运动速度约为18.2 mm/s。

图6多机器人路径跟踪
为了对磁驱系统的可靠性进行全面评估,研究人员开展了往复运动实验,控制FDR在两个相邻线圈之间重复运动。结果表明,即使经过1000次循环,FDR仍然能够实现精确跟踪和有效驱动,验证了系统具有良好的重复定位精度与稳定的驱动性能。此外,研究团队还通过仿真和实际测量进行热分析(图7)。结果表明,在额定工作电流(0.1 A)下,线圈表面温度稳定在40°C,即使在最大实验电流(0.15 A)下,温度也不超过59°C,且断电后10分钟内可自然降至室温,验证了系统具有良好的热稳定性与连续工作能力。

图7系统可靠性分析
同时,研究团队还展示了大规模FDR的可编程并行控制,包括液滴排序、协调运动以及运动、变形、分裂和合并的集成操控,以验证系统在多机器人协同应用中的可行性与可扩展性。
液滴排序实验
研究团队利用分布式磁场的独立可控性,基于“归并排序(merge sort)”算法,将6个无序排列的FDR按照体积增大有序排列(图8)。实验结果表明,与单FDR执行排序任务相比,多FDR协同作业可将任务效率提升约300%。
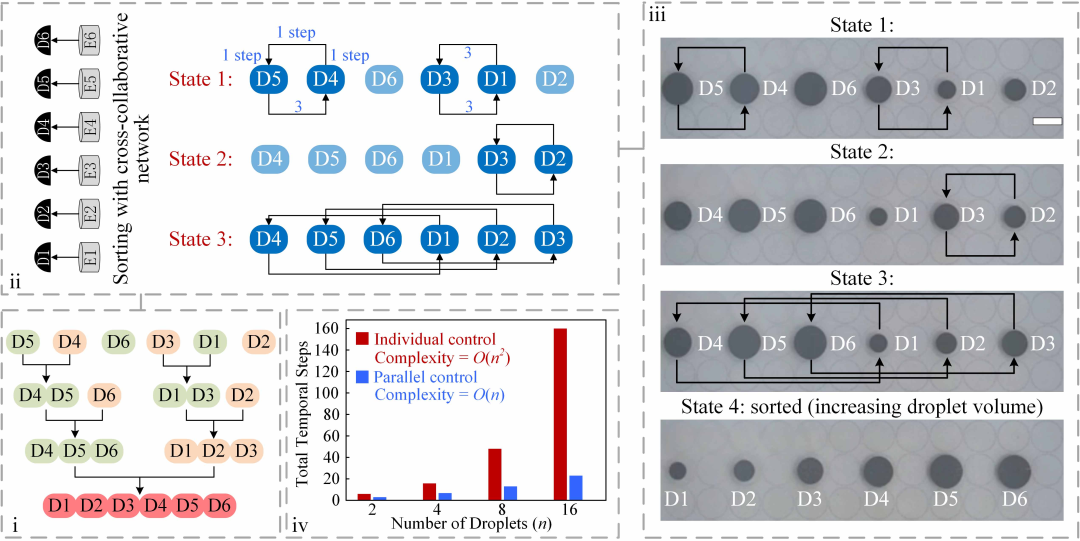
图8液滴排序

图9大规模FDR并行控制
大规模FDR并行运动实验
团队进一步开展了16、36和72个FDR的并行控制实验(图9)。通过合理设计初始布局与路径规划,使FDR以矩阵排列或交错排布的形式,完成同步平移、分布变换等多种协同任务。实验结果表明,每个FDR可独立响应激活线圈,实现大规模队形变换,理论上,该系统可支持最多144个FDR的并行控制。
集成运动-变形实验
研究团队还开展了多个FDR集成运动、变形、分裂与融合的连续操作实验。6个FDR依次完成“移动—拉伸—分裂—再次移动—融合”的全流程操作,整个过程仅耗时约11秒,充分展现了系统在复杂多模态控制场景下的高效性。
此外,研究团队还进行了可重构FDR的协同编队实验,以验证系统在数字显示、图案重构、信息编码等多FDR自组织场景中的广泛拓展性。
通过协同控制FDR的位置、数量和形状,FDR编队能灵活变换队形(图10)。结果表明,FDR能够快速重组,实现在多个字母之间的快速切换,如从“Z”变为“N”,也能通过分裂与融合改变数量,从而完成从“C”到“D”的图案重构。此外, FDR还能以不同形状组合成摩斯码,实现信息编码显示。

图10可编程重构
最后,研究团队进行了多流体混合实验,以展示所设计系统的应用潜力。
研究团队设计了一个带有4个储液区和混合区的微流控装置,4个FDR分别将不同颜色的油性色素从各自通道推入混合区域,第5个FDR在混合区内通过往复运动实现高效搅拌(图11)。系统可通过控制FDR的启停,实现按指定顺序依次注入和混合多种液体,最后成功完成四色染料的编程混合,展示了该平台在样品处理、化学合成等领域的应用潜力。

图11流体混合
论文链接:https://ieeexplore.ieee.org/document/11059837
如需咨询企业合作事宜,欢迎联系堂博士(13810423387,手机与微信同号)进行对接。
----------------END-------------------

工业机器人企业
埃斯顿自动化 | 埃夫特机器人 | 非夕科技 | 法奥机器人 | 越疆机器人 | 节卡机器人 | 松灵机器人 | 珞石机器人 | 盈连科技 | 集萃智造 | 优傲机器人 | CGXi长广溪智造 | 阿童木机器人 | 极智嘉
服务与特种机器人企业
医疗机器人企业
元化智能 | 天智航 | 思哲睿智能医疗 | 精锋医疗 | 佗道医疗 | 真易达 | 术锐®机器人 | 罗森博特 | 磅客策 | 柏惠维康 | 迪视医疗 | 水木东方
人形机器人企业
优必选科技 | 宇树 | 云深处 | 星动纪元 | 伟景机器人 | 逐际动力 | 乐聚机器人 | 大象机器人 | 中科深谷 | 魔法原子 | 众擎机器人 | 帕西尼感知 | 赛博格机器人 | 数字华夏 | 理工华汇 | 傅利叶智能 | 天链机器人 | 开普勒人形机器人 | 灵宝CASBOT | 清宝机器人 | 浙江人形机器人创新中心 | 动易科技
具身智能企业
跨维智能 | 银河通用 | 千寻智能 | 灵心巧手 | 睿尔曼智能 | 微亿智造 | 推行科技 | 中科硅纪 | 枢途科技 | 灵巧智能 | 星尘智能 | 穹彻智能 | 方舟无限 | 科大讯飞 | 北京人形机器人创新中心| 国地共建人形机器人创新中心 | 擎朗智能 | 戴盟机器人| 视比特机器人| 星海图
核心零部件企业
绿的谐波 | 因时机器人 | 坤维科技 | 脉塔智能 | 青瞳视觉 | 本末科技 | 鑫精诚传感器 | 蓝点触控 | BrainCo强脑科技 | 宇立仪器 | 极亚精机 | 思岚科技 | 神源生 | 非普导航科技 | 锐驰智光 | NOKOV度量科技 | 因克斯 | 褔德机器人 | 巨蟹智能驱动 | 微悍动力 | 元客视界 | 璇玑动力| 意优科技| 瑞源精密 | 灵足时代| Xynova曦诺未来
教育机器人企业
加入社群
欢迎加入【机器人大讲堂】读者讨论群, 共同探讨机器人相关领域话题,共享前沿科技及产业动态,添加微信“robospeak2018”入群!


看累了吗?戳一下“在看”支持我们吧










