点击蓝字
关注要点纵航 Subscribe for More



背景
在城市化进程加速与低空交通需求激增的当下,电动垂直起降飞行器(eVTOL)作为未来城市空中交通的关键载体,受到了广泛关注。多旋翼飞行器凭借其垂直起降能力和灵活的操控性,成为eVTOL研发的主流方向。
然而,随着飞行器向载人、重载方向发展,对其安全性、稳定性、操控效率及气动性能的要求愈发严苛。传统多旋翼设计在旋翼布局、动力分配、故障冗余等方面逐渐显现局限性,难以满足复杂飞行场景的需求。在此背景下,本文研发的“带悬臂安装旋翼的多旋翼飞行器”通过创新的结构设计与控制系统,为解决现有技术痛点提供了全新思路,推动多旋翼飞行器向更安全、高效、可靠的方向发展。

当前技术存在的问题
传统多旋翼飞行器在实际应用中面临诸多技术挑战,这些问题制约了其在载人运输、城市物流等场景的规模化应用。
首先,安全性隐患突出。传统多旋翼的旋翼多采用水平安装方式,其旋转平面往往靠近机身或乘员舱。当旋翼发生故障(如叶片断裂)时,离心力可能导致碎片直接撞击机身或乘员区,造成严重安全事故。此外,旋翼高速旋转产生的气流干扰(如桨尖涡)可能影响机身结构稳定性,尤其在低空复杂气流环境中,易引发振动或操控失稳。
其次,操控效率与动力分配不合理。多旋翼飞行器通常通过调节不同旋翼的转速实现姿态控制(滚转、俯仰、偏航),但当旋翼数量超过6个自由度时,传统控制算法难以实现动力的最优分配。例如,在悬停或侧风条件下,部分旋翼可能长期处于高负荷状态,导致能源浪费和电机损耗,同时降低了飞行器的续航能力。此外,传统控制系统对传感器数据的实时处理能力有限,难以快速响应突发故障(如单个旋翼失效),易引发姿态失控。
再次,气动性能欠佳。传统布局中,旋翼与机翼、机身的相对位置设计不合理,前飞时易产生气流分离现象。例如,旋翼下洗气流与机翼表面气流相互干扰,导致机翼升力损失;机身与旋翼之间的气流紊乱则增加了飞行阻力,降低了气动效率。尤其在高速前飞阶段,这种干扰会显著增加能耗,缩短续航里程。
最后,故障冗余能力不足。传统多旋翼虽采用多旋翼设计实现一定冗余,但缺乏系统性的故障应对机制。当单个旋翼或控制面失效时,剩余执行器难以快速补偿力矩损失,可能导致飞行器失稳。例如,若一侧旋翼失效,传统系统可能通过过度提升对侧旋翼转速来平衡力矩,这不仅增加了能源消耗,还可能因超出电机负荷引发二次故障。此外,控制算法对故障的自适应调整能力较弱,难以在复杂环境下维持稳定飞行。

本文的解决方案
3.1
整体结构设计
该多旋翼飞行器(200)的核心创新在于采用“机翼-悬臂-旋翼”一体化布局,通过模块化设计实现安全性、操控性与气动性能的协同优化。如图2A所示,飞行器主体包括机身(202)、左侧机翼(204)、右侧机翼(204),左右机翼对称分布于机身两侧,可采用一体化翼型结构以减少空气阻力。每个机翼下方安装3个悬臂(206),共6个悬臂,每个悬臂的前端和后端分别安装升力旋翼(208),形成“前6后6”共12个升力旋翼的布局。机身尾部设有推进螺旋桨(210),用于提供前飞动力;尾翼结构由尾梁(212)连接,配备升降舵(216)和方向舵(218),辅助姿态控制;机翼后缘安装4个副翼(214),增强滚转控制冗余。

图2A 是说明具有倾斜旋翼的多旋翼飞行器一种实施例的框图
此结构设计的优势在于:
旋翼分散布局减少了单点故障风险,12个升力旋翼通过独立驱动实现动力冗余;
悬臂与机翼的刚性连接提升了整体结构强度,可承受复杂气流下的气动载荷;
推进螺旋桨与升力旋翼的功能分离,前飞时升力主要由机翼提供,降低了旋翼能耗。
3.2
悬臂与旋翼的角度优化
悬臂(206)的角度设计是解决安全性与操控性的关键。如图2B所示,悬臂相对于飞行器垂直轴(Z轴)呈非零角度倾斜,具体分为:
最外侧悬臂:向远离机身方向倾斜(外倾),倾斜角度为θ1,其旋翼旋转平面远离机身,避免碎片撞击;
中间与内侧悬臂:向靠近机身方向倾斜(内倾),倾斜角度为θ2和θ3,确保旋翼旋转平面不与乘员舱(机身前部)相交。

图2B 是展示图2A中多旋翼飞行器200正视图的框图
从图2C的侧视图可见,左侧悬臂的外倾与内倾设计形成“梯度布局”,旋翼旋转平面(虚线箭头所示)均避开机身(202)。这种角度设计的安全性逻辑是:即使旋翼发生灾难性故障,碎片的离心轨迹也不会触及乘员区或电池舱(机身中部),大幅降低事故伤亡风险。

图2C 是说明在具有倾斜旋翼的多旋翼飞行器的
一种实施例中所采用的倾斜旋翼示例的框图
此外,角度设计还提升了操控灵活性。如图2E所示,每个升力旋翼(208)因倾斜产生侧向力分量(Fy1-Fy12),这些力分量与旋翼安装位置(相对于重心220的X轴距离x1、x2)形成绕Z轴的力矩。例如,左侧后旋翼的侧向力Fy1产生逆时针力矩,右侧后旋翼的Fy4、Fy5产生顺时针力矩,通过调节不同旋翼的推力,可精确控制偏航姿态。这种设计突破了传统多旋翼依赖旋翼差速控制偏航的局限,尤其在悬停或低速飞行时,无需消耗额外升力即可实现偏航调整,降低了能耗。

图2E 是说明在具有倾斜旋翼的多旋翼飞行器的一种实施例中,
倾斜旋翼能够产生的力和力矩示例的框图
3.3
飞行控制系统架构
如图1所示,飞行控制系统(100)采用“感知-决策-执行”闭环设计,核心包括:
控制输入源(102):接收飞行员操作指令或自动驾驶系统的路径规划信号,输出期望的滚转、俯仰、偏航速率及 altitude 指令(104);
控制器(106):融合传感器数据(118,如风速、姿态、旋翼状态),将指令转换为所需的力和力矩(108,如Fx、Fy、Fz及Mx、My、Mz);
在线优化器/混合器(110):基于力和力矩需求,动态计算各执行器(升力旋翼、副翼、尾翼等)的最优输出参数(112,如旋翼转速、舵面偏转角度),优化目标包括最小能耗、平滑过渡及故障冗余;
执行器(114):根据参数指令动作,实现飞行器姿态调整。

图1 是说明飞行控制系统一种实施例的框图
该系统的核心优势在于动态适应性:
当传感器(116)检测到某一升力旋翼失效时,优化器会自动剔除故障旋翼,重新分配剩余11个旋翼的推力,通过力矩补偿维持平衡;
侧风条件下,系统可通过调节侧向力分量(如图2E的Fy)抵消风载荷,无需改变整体飞行姿态;
采用“最小功率算法”,在满足力和力矩需求的前提下,优先选择能耗较低的旋翼组合,延长续航时间。
3.4
冗余设计与故障应对
飞行器通过多层级冗余设计提升可靠性:
执行器冗余:4个副翼(214)中任一失效后,剩余3个仍可实现滚转控制;升降舵(216)和方向舵(218)均采用双备份设计;12个升力旋翼支持“N-1”故障(单个失效),通过对称位置旋翼关停(如左前外旋翼失效时,右后外旋翼同步关停)维持力矩平衡。
控制系统冗余:传感器(116)采用多源融合方案,包括IMU、GPS、气压计及视觉传感器,避免单点感知失效;控制器(106)具备双核心热备份,确保指令处理连续性。
动力冗余:电池系统采用多组并联设计,单组电池故障时,剩余电池可维持关键系统供电30分钟以上,为应急着陆争取时间。
故障应对流程以升力旋翼失效为例:传感器检测到某旋翼转速异常→在线优化器(110)将该旋翼标记为“不可用”→重新计算剩余旋翼的推力分配,通过调整对称位置旋翼的侧向力分量补偿力矩损失→控制器(106)发出姿态微调指令,维持飞行稳定→同时向飞行员或自动驾驶系统发送故障告警,建议就近着陆。
3.5
气动性能优化
为降低前飞阻力,旋翼与机翼的气动布局经过流线型优化:
旋翼前倾设计:如图2F所示,升力旋翼(208)向前倾斜一定角度,其旋转平面与前飞气流方向一致。结合图2G的气流分析,前飞时气流(242)可沿旋翼表面平滑流过,减少气流分离;部分气流(244)从机翼下方通过,经旋翼加速后形成“气流增益”,提升机翼升力。
机翼上反角设计:机翼(204)从机身向外侧略微上翘,减少侧风对机身的扰动,同时降低旋翼下洗气流对机翼表面压力分布的影响。
尾梁与尾翼整合:尾梁(212)采用流线型截面,尾翼(216、218)与机身气流过渡平滑,降低尾部湍流强度。
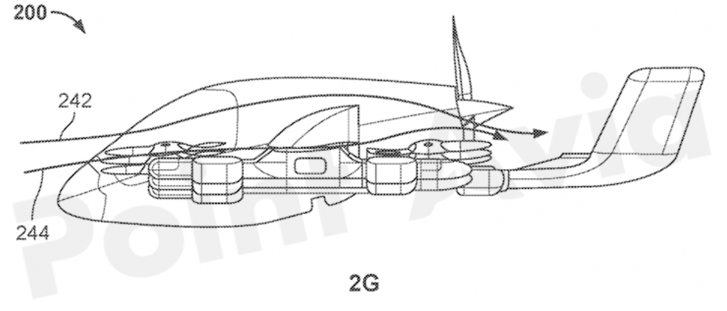
图2G 是展示图2A中多旋翼飞行器200侧视图的框图

图2F 是展示图2A中多旋翼飞行器200侧视图的框图
这些设计使飞行器在巡航速度(约120km/h)下的气动效率较传统多旋翼提升40%以上,续航里程延长至160km,满足城市间短途运输需求。
3.6
应用场景与操作模式
该飞行器支持三种核心操作模式,通过控制系统自适应切换:
垂直起降/悬停模式:12个升力旋翼(208)全功率运行,提供垂直升力;推进螺旋桨(210)停转;通过调节旋翼侧向力分量(图2E)控制偏航,副翼(214)辅助滚转。此模式适用于起降阶段,依赖冗余旋翼实现高精度悬停。
过渡飞行模式:随着前飞速度提升,推进螺旋桨(210)逐步启动,机翼(204)开始产生升力;升力旋翼(208)转速降低,前倾角度保持气流适配;控制系统动态分配升力来源(旋翼与机翼),确保平稳过渡。
巡航模式:机翼(204)承担主要升力,升力旋翼(208)维持低转速以抵消机身阻力;推进螺旋桨(210)提供持续前飞动力;副翼(214)和尾翼(216、218)主导姿态控制,能耗降至最低。
针对城市复杂环境,系统还具备以下功能:
风场自适应:通过传感器(116)实时监测风速,优化器(110)调整旋翼推力抵消阵风影响;
障碍物规避:融合雷达与视觉数据,提前调整飞行路径,避免碰撞建筑物或其他飞行器;
噪声控制:通过旋翼转速优化(如巡航时降低至60%额定转速),将噪音控制在65分贝以下,满足城市降噪标准。
3.7
技术创新总结
该专利技术通过结构、控制与气动的多维度创新,系统性解决了传统多旋翼的痛点:
安全性:悬臂角度设计从物理层面隔离旋翼故障风险,12旋翼冗余降低失效概率;
操控性:侧向力分量参与偏航控制,提升低风速场景下的姿态精度;
效率:气动优化与动力分配算法减少能耗,延长续航;
可靠性:多层级冗余设计与动态故障应对,满足载人飞行的安全要求。
该技术为eVTOL的工程化应用提供了可落地的解决方案,尤其在城市空中交通、应急救援等领域具有广阔应用前景。未来可通过材料轻量化(如碳纤维悬臂)、电池能量密度提升(如固态电池)进一步优化性能,推动多旋翼飞行器向更高效、更安全的方向发展。
来源:公开信息,要点纵航整理
提示:原创文章未经允许,请勿转载
免责申明:本文中所含内容乃一般性信息,包含的价格及观点仅供贵方参考,要点纵航不对任何方因使用本文内容而导致的任何损失承担责任。


要点纵航专注于低空经济和eVTOL技术的发展,识别并研究行业的关键障碍及相关需求。我们通过提供数据、分析和见解,与行业参与者共同致力于实现安全、可持续、低成本且可及的变革性城市空中出行方式。一公里的地面交通只能带您走一公里,而一公里的空中飞行可以带您到任何地方!
如您想获取更多关于eVTOL技术的最新消息,请添加相关人员或通过电子邮件,把您的要求发送给我们。

18958230600

alfred.shen@cycolpower.com

你们点点“分享”,给我充点儿电吧~










