

在技术原理上,团队受 “电致流动” 这一经典物理现象启发,将其转化为深海柔性装备的电液驱动机制。机器人的电液单元由薄膜壳体、柔性电极及内部介电液构成,在麦克斯韦应力作用下,介电液定向流动,可精确驱动柔性单元产生可控变形。同时,驱动单元内部介电液能与深海海水压力实现自适应平衡,让系统具备全海深压力适应性。

针对深海高压低温环境下软材料易硬化、制约驱动器性能的问题,团队揭示了柔性电液单元介质的液—固塑化机制,提出 “电液、塑化介质一体化” 策略。通过整合液体介电塑化剂,既维持了聚合物外壳的柔软性,又作为电液流体实现高效驱动;同时利用周围海水作为交替电极,避免了介电层电荷滞留,保障了持续驱动性能。
在功能上,这款机器人通过自带的小型化能源控制系统实现电液单元协同驱动,当软基体中的电子器件产生高压电信号时,柔性电液单元会在电压信号的激励下产生类似流体静力骨骼的变形模式,能在电压信号激励下完成直行、转弯等多种轨迹运动。它还集成了微型深海光学感知系统,可以在深海极端环境下实时感知自身运动状态和环境目标,使小尺度软体机器人具备深海近底感知能力。

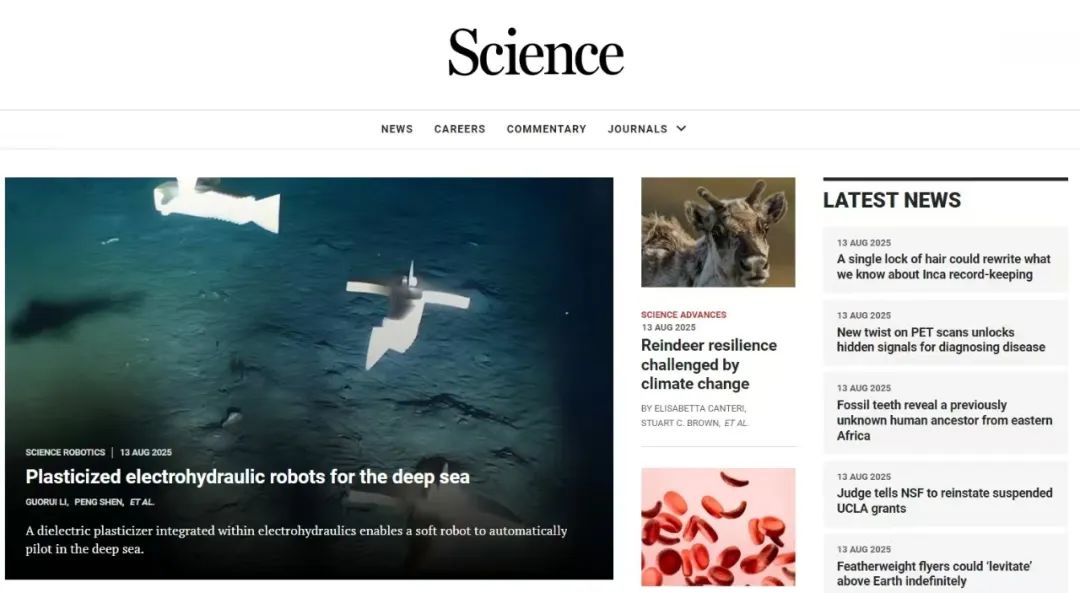
为验证可靠性,团队在多个深海区域开展了海试验证。2024年6月,机器人在南海3176米深度完成布放,在复杂水流环境下完成了复杂轨迹运动、近底感知探测等任务;同年7月,它在南海海马冷泉区(约1369米深度)实现低扰动探测,并搭载 “海星” 号深海ROV在约4070米深的海山区完成航行试验,验证了与深海潜水器协同作业的可行性。此外,机器人还成功开展了海洋生态环境和群落的原位、近距离行为观测。
李国瑞教授表示,这项工作为极端环境下软体机器人与智能装备的驱动设计提供了新路径;核心成员沈鹏博士则指出,机器人展现的良好性能有望为深海生态观测提供可持续的技术革新。


目前,团队正聚焦多学科交叉,探索小型化深海软体机器人的驱动、感知、通讯一体化集成及群体智能等方向。未来,他们将持续突破极端环境下柔性装备的材料耐久性、系统可靠性等关键挑战,拓展应用场景,如通过群体化机器人开展低扰动原位探测,或利用软体机器手实现脆弱样本无损采集等,助力海洋科技高水平自立自强。
论文链接:
https://www.science.org/doi/10.1126/scirobotics.adt8054
文章来源:哈尔滨工程大学
如需咨询商务合作、宣传推广、转载开白等事宜,请联系:18355423366 (微信同号)对接。
END