本文由“机器人ROBOT”公众号原创,欢迎转载,请务必完整转载全文并在文章初始位置插入本公众号名片和链接。
欢迎引用:
陈彦杰, 沈蒙召, 施玮恒, 钟杭, 缪志强, 王耀南. 面向沼泽湿地环境采样的空中作业机器人变刚度柔顺控制[J]. 机器人, 2025, 47(3): 361-371, 382.
空中作业机器人因其高机动性和悬停能力而被广泛应用于各种场景,例如物体抓取、装配和基础设施检查。机械臂的灵活性使空中作业机器人能够主动执行复杂任务或在任务执行过程中对环境交互做出反应。然而,这种灵活性也带来了许多风险,包括交互不稳定、柔顺性不足以及操作性能不足。针对这些风险,探索更加先进的柔顺交互与精确控制方法是空中作业机器人增强作业能力、拓展作业领域的迫切需求。
近日,福州大学陈彦杰教授团队及湖南大学缪志强教授、王耀南院士团队在《机器人》上发表了题为“面向沼泽湿地环境采样的空中作业机器人变刚度柔顺控制”的论文。针对空中作业机器人在沼泽湿地环境下执行采样任务时的柔顺操纵和精确控制问题,本文提出了一种变刚度柔顺控制框架。首先,设计了一种基于能量罐的变刚度导纳控制方法,实现空中作业机器人刚度可调节的柔顺采样。其次,提出了一种边界自适应方法,有效解决了因变刚度柔顺性引发的能量罐能量不足的问题,提升了空中作业机器人采样过程的安全性。然后,利用规定时间控制方法设计了干扰观测器和位姿控制器,改进了空中作业机器人的干扰估计,提升了轨迹误差收敛速度。接着,结合无源性理论和李雅普诺夫工具分析了所提出的变刚度柔顺控制框架的稳定性。最后,通过仿真和实验验证了变刚度柔顺控制框架的柔顺性、安全性和稳定性。
空中作业机器人变刚度柔顺采样任务示意如图1所示。具体来说,空中作业机器人的采样过程分为四个阶段,如图2所示。阶段(a):按照控制器设置在规定时间内接近采样地点;阶段(b):在外部未知随机干扰影响下保持悬停;阶段(c):空中作业机器人驱动机械臂执行采样任务并调节柔顺性;阶段(d):采样完成后返回起始地点。

图1 空中作业机器人变刚度柔顺采样任务示意图

图2 空中作业机器人变刚度柔顺采样实验过程
不同于一般的环境交互作业任务,沼泽湿地环境中存在诸多未知随机扰动,且内部组成复杂多变,交互力具有非线性特性,这些问题及现象都会影响空中作业机器人的控制性能和柔顺性能,甚至造成系统不稳定。为此,本文提出了一种变刚度柔顺控制框架(如图3所示)。具体而言,在不考虑能量消耗的情况下,设计了一种基于能量罐的变刚度导纳控制方法。该控制方法基于无源性准则,能够实现空中作业机器人刚度可调节的柔顺采样。然后,针对柔顺采样过程中始终需要留存能量维持无源性的需求,提出了一种能量罐边界自适应方法,有效解决了因变刚度柔顺性引发的能量不足的问题,提升了空中作业机器人采样过程的柔顺性和安全性。最后,利用规定时间控制方法设计了干扰观测器和位姿控制器,改进了空中作业机器人的干扰估计,提升了轨迹误差收敛速度。

图3 空中作业机器人系统的控制框架
为了验证所提变刚度柔顺控制框架的柔顺性、安全性和稳定性,在自建实验平台上进行了对比测试。
首先,在模拟沼泽湿地的采样环境下进行稳定飞行实验,实验结果如图4所示。从中可以看到,所提规定时间控制器能够在规定时间内实现跟踪误差的收敛,且收敛速度更快,稳态误差更小。

图4 稳定飞行实验结果对比
进一步,开展变刚度柔顺采样测试,验证所提可变边界能量罐方法的柔顺性和安全性。
图5展示了变刚度柔顺采样实验结果对比。具体来说,图5(a)展示了采样过程中的末端受力,本文方法的受力轨迹没有突变,整体曲线更平滑。图5(b)为变刚度导纳控制器在z轴方向上的柔顺曲线。图5(c)展示了采样过程中运动控制器的轨迹跟踪误差,本文控制器可以在采样期间遵循期望轨迹。图5(d) 展示了末端执行器在受到交互力之后产生柔顺行为,本文方法所产生的轨迹没有突变,整体曲线更平滑,且误差逐渐减小。

图5 变刚度柔顺采样实验结果对比
图6展示了实验时采样过程中能量和导纳参数变化对比。具体来说,图6(a) 为不同方法的能量罐能量变化曲线,图6(b)为变刚度导纳控制器在z轴方向上的惯性、刚度和阻尼值变化曲线。从图中可以看出,本文方法的能量曲线更平滑,能够始终维持在能量罐下边界之上,且导纳参数无突变。
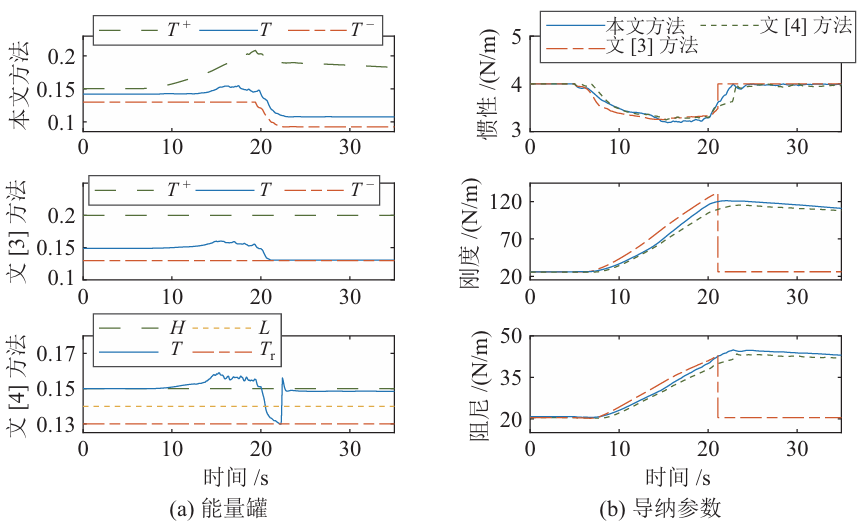
图6 实验时采样过程中能量和导纳参数变化对比
本文研究了空中作业机器人在沼泽湿地环境下执行采样任务时的柔顺操纵和精确控制问题,提出了一种变刚度的柔顺采样控制框架。实现了在变刚度情况下进行柔顺采样的同时,进行精确的运动跟踪。开发了基于四旋翼无人机的空中作业机器人变刚度柔顺采样平台,通过仿真和实验验证了所提控制框架的柔顺性、安全性和稳定性。未来,所提控制框架可以与先进的运动控制方法及冗余机械臂相结合,以执行更复杂的任务。
福州大学机械工程及自动化学院陈彦杰教授为论文第一作者,湖南大学电气与信息工程学院缪志强教授为论文通信作者,本文得到了国家自然科学基金(62273098,62273138)的支持。


识别二维码,访问全文PDF
联系我们 :

电话:024-23970050

E-mail:jqr@sia.cn

网址:https://robot.sia.cn