点击上方蓝色字,关注我们

近日,吉林大学任露泉院士团队韩志武教授课题组在Science Advances发表题为“Hypersensitive Pressure Sensors Inspired by Scorpion Mechanosensory Mechanisms for Near Body Flow Detection in Intelligent Robots”的研究性论文。

研究人员从蝎子身上获得灵感,研发出一种新型仿生压力传感器,帮助六足智能机器人成功躲避“捕食者”并追捕“猎物”——两者由不同尺寸的移动纸箱模拟。得益于蝎子的特征感知结构,结合深度学习神经网络,这款超灵敏仿生传感器通过识别近体流场波动来识别不同形状的运动物体,准确率超过85%。

本研究中,韩志武教授研究团队从蝎子触肢细密的蛊毛感受器(trichobothria)和位于跖骨末梢关节处的缝感受器(slit sensilla)中获得灵感,设计了一种高性能的压阻式压力传感器。
他们通过电子显微镜分析蝎子机械量感受器的微观结构,利用电生理试验与DIC技术来探究蝎子高精度感知机理,并在传感器设计中引入应力陷阱来模拟缝感受器的应力集中感知机理,同时开发挠曲抑制单元模拟蛊毛感受器的爪状特征。
这些结构分别布置于半导体芯片的顶层和底层,前者通过提高敏感单元周围整体能量流入显著提升了压力灵敏度,后者利用挠曲抑制单元大幅削弱了芯片的“气球效应”进而优化了传感器的线性度。实验结果显示,该传感器灵敏度达65.56 mV/V/kPa,线性度高达0.99934,可精确测量气流、压力、高度及辨别流场流态。

图1-蝎子感受器启发的高精度压力传感器:(A)蝎子的体表感知系统;(B)仿生压阻式压力传感器结构;(C)仿生传感器件实物与SEM图片;(D)仿生传感器工作原理;(E)仿生传感器多物理量检测能力。
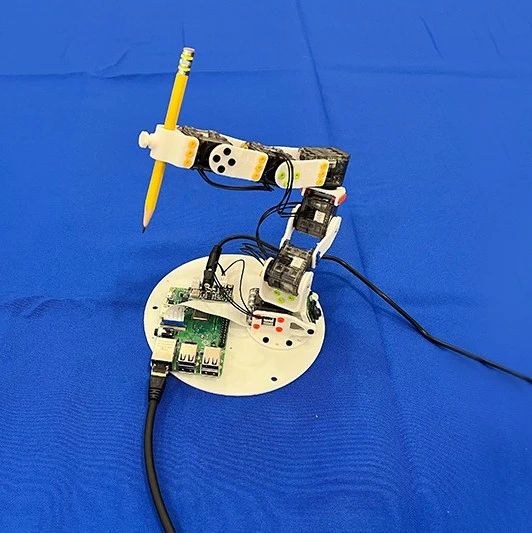
韩志武教授等人进一步将该传感器与深度学习网络集成,应用于仿蝎子运动的六足机器人。该机器人基于传感器的精准感知能力,识别并追踪移动目标,展现出类蝎子的应激响应行为。

图2-类蝎子六足机器人的近体流场检测:(A)装备仿生传感器的类蝎子六足机器人;(B)PCB设计;(C)原理示意图;(D)仿生传感器的布置方式;(E)仿生传感器对从不同方向接近的物体的响应;(F)类蝎子六足机器人“狩猎”行为:(G)类蝎子六足机器人“逃避天敌”行为。