本文由“机器人ROBOT”公众号原创,欢迎转载,请务必完整转载全文并在文章初始位置插入本公众号名片和链接。
欢迎引用:
黎定佳, 郭钰琪, 杨永明, 李锐, 刘连庆, 刘浩. 腔道介入交互约束下的柔性机器人具身形态感知方法[J]. 机器人, 2025, 47(4): 497-507.
腔道类疾病是最常见的人体疾病。柔性机器人因其重量轻、尺寸小、运动灵活和环境顺应性强等优点,有助于介入腔道到达更深更广的区域实现治疗。然而由于腔道具有曲折柔软的特点,柔性机器人在介入的过程中容易与腔道组织交互受到阻塞约束,介入产生的过大挤压力会使组织产生损伤甚至破裂,如图 1 所示,故对操作技能提出了更严苛的要求。赋予柔性手术机器人具身感知的能力,意味着其能实现从感知到认知,可以像人类一样(甚至超越人类)感知、理解交互状态并响应环境信息作出决策。目前对于手术机器人的具身感知研究大多集中在视觉图像的处理,对于柔性机器人本体感知与理解仍研究较少。

图1 柔性机器人在曲折腔道中介入
近日,中国科学院沈阳自动化研究所刘连庆、刘浩研究员团队在《机器人》上发表了题为“腔道介入交互约束下的柔性机器人具身形态感知方法”的论文。针对柔性机器人在腔道介入中因交互约束受阻而难以前进的问题,提出了一种基于 FBG 的具身形态感知方法,以提升介入的安全性及智能化水平。该方法从形态信息的采集、处理、理解到行为决策的层面实现机器人从本体形态感知到认知的过程。首先基于离散圆弧假设实现多芯 FBG 光纤的形状重建,然后通过逐步提取邻域圆弧状态的影响的方式,提出了一种改进的移动平均滤波(IMAF)方法,实现信号噪声的平滑处理。同时提出一种基于时―空变化的阻塞检测方法,通过与环境的动态交互对形状进行理解。利用理解得到的交互状态,采用基于仿人操作和瞬时全局一致性指数(IGII)的间歇式介入策略,保证介入的柔顺性。柔性机器人完整的具身形态感知逻辑框图如图2所示。最后开展仿真实验和实物实验,通过与不同的滤波方法比较证明了 IMAF方法的先进性,并且通过不同的场景验证阻塞检测方法以及介入方法的可行性及有效性。

图2 具身形态感知框图
FBG是通过紫外激光在光纤纤芯上形成周期性折射率调制产生的。当光纤受到应变和温度变化时,FBG的光栅周期和折射率发生变化,导致布拉格中心波长发生偏移。通过测量偏移量可确定应变的大小和温度的变化。因此FBG传感器因体积小、抗干扰能力强和生物相容性好,是赋予柔性介入机器人具身智能的理想传感元件。由于FBG特定的光栅结构,当其受到入射光照射时可以反射特定波长λ的光,并且波长与光纤的应变存在一定的线性关系。由于光纤的形状平滑且连续,可以假设FBG节点处的形状为常曲率圆弧,形变的曲率κ和方向θ,如图3所示。由于形变与应变也存在特定的关系,因此通过反射的波长可以计算得到光纤的形变,通过积分获得整体的形状。
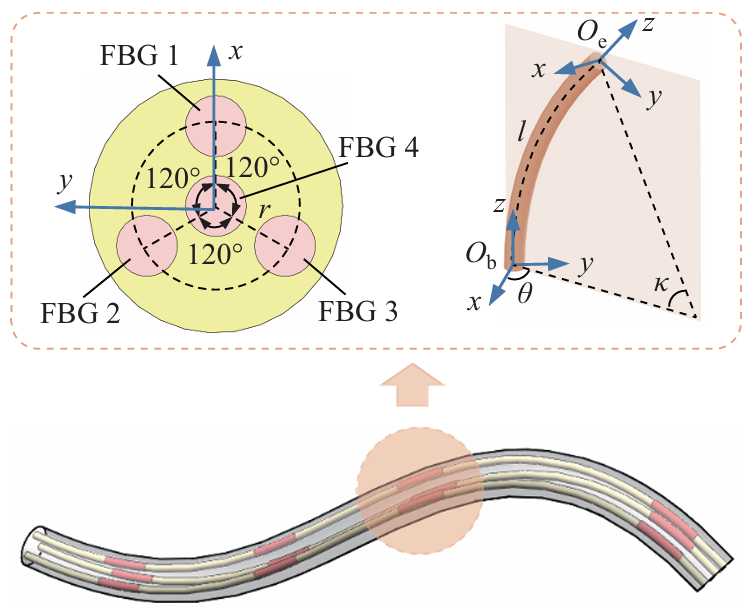
图3 集成4根纤芯和多节点 FBG 的光纤
使用传统方法从 FBG 传感器中获得的波长信号和应变信号存在噪声且不稳定,可能导致曲率及其方向不准确。因此,形状误差会随着所有的 FBG传感器节点所覆盖的光纤长度的增加而增大。为了解决这一问题,设计了一种改进的 IMAF 方法对光纤的每个 FBG 节点上圆弧的几何参数进行平滑处理。由于光纤不会出现大曲率的弯折,因此相邻圆弧的变化不会很大,每段圆弧的状态可参考相邻圆弧。IMAF 方法的目标是逐步提取邻域圆弧状态的影响成分并将该状态收敛至最终的状态,具体方法如图4所示。

图4 IMAF 方法的原理
柔性机器人在介入并与曲折腔道交互时会受到阻塞,导致机器人无法继续介入前进。仅通过当前时刻的形状反馈信息难以理解机器人交互接触时的状态。该文提出了一种基于时―空变化的阻塞识别方法。当机器人向前介入时,相邻时间间隔下的空间形状会发生变化。通过相邻时间间隔的形状差异e可以判断阻塞点发生的位置,进而为介入的决策提供信息。而在柔性机器人介入时,遇到阻力是不可避免的。盲目地前进会导致阻力越来越大,甚至对组织造成损伤。操作者手动控制导管往前推时,也会碰到此类问题,他们会选择退出导管一部分再重新往前进,目的是为了减少或消除部分屈曲的导管。如此反复最终使导管介入目标点,如图5所示。

图5 间歇式介入原理
因此该文利用感知理解得到的阻塞状态,模仿操作者这种经验动作,提出了一种间歇式的介入策略。在柔性机器人连续介入的过程中,当检测到阻塞位置时,机器人以vb的速度后退。否则,机器人以vf的速度前进。vf为匀速前进的速度,可事先给定。vb为后退的速度,该文提出基于IGII准则的计算方法,提高其动作效率。全局一致性准则(GII)是一个全局变量,用于量化机器人从近端传递到远端的力的各向同性或均匀性,而该文通过对其求时间导数获得其瞬时值(IGII)。IGII越大意味着柔性机器人在介入过程中具有更平直的形态,从而使力从执行器传递到远端更有效,最大限度地减小因过度弯曲引起的屈曲量,使其介入更加平滑。
为了验证FBG光纤形状传感的性能,使用2个形状模板进行测试。模板采用3D打印的方式,分别呈现螺旋形状和椭圆形状。螺旋形状模板具有恒定的曲率和线性变化的弯曲方向,椭圆形状模板具有变化的曲率和恒定的弯曲方向。将柔性机器人放置在模板凹槽中以测量其弯曲曲率、弯曲方向以及3维形状。计算得到的误差结果如图6所示。从结果可以看出,IMAF方法在实际的形状测量中可以一定程度上平滑噪声,减少其对真实信号的影响,从而提高形状的测量精度。可以得到仅通过测量数据以及使用IMAF方法后重建形状的末端误差分别为3.7 mm和3.9 mm(占全长2.2%和2.3%)。IMAF方法重建形状的末端误差分别为2.1 mm和2.5 mm(占全长1.2%和1.5%),精度均比仅测量的方法有所提升。

图6 形状感知实验
为了验证提出的阻塞检测方法的效果,设计了2条圆弧槽,圆弧末端封闭作为模拟阻塞。控制柔性机器人以vf=2.5 mm/s的速度匀速前进,直到尽头遇到阻碍时停止。设置采样间隔∆t=2 s,观察e随时间和柔性机器人长度变化的结果。介入结果如图7所示,可以看出机器人在正常运动时,其本体上每一点相对于上一时刻的位置在世界坐标系上都有约vf∆t的位移。但当碰到阻碍时,机器人上会有一部分受到了阻塞,导致该段位置变化大小比正常情况有所下降。对于形状板1和形状板2,分别取e0=4.7和e0=4.5时,终点时刻形状偏差低于e0的部分随柔性机器人轴线位置的变化比较平稳,可将该部分对应的柔性机器人本体上的位置视为阻塞段。因此可以通过设置位置偏差阈值e0=0.92vf∆t来判断阻塞出现的时间,以及阻塞段和阻塞点的位置,从而为后续的介入决策提供信息。

图7 阻塞检测实验
通过形状传感可以获得与环境交互的理解,以及对行为的决策,下面通过实际的场景验证介入行为决策的有效性。形状板上刻有曲线的凹槽模拟血管腔道,而柔性机器人则模拟导丝介入血管。对不同的情况分别采用匀速介入方法(vf=1.5mm/s)与基于形状反馈的间歇式介入方法控制柔性机器人向前运动一段距离,采集力传感器数据并进行对比。结果如图8所示,形状板1的2种介入方法的平均介入力分别为0.088 N和0.076 N,介入时间分别为47.7 s和76.8 s。形状板2的2种介入方法的平均介入力分别为0.06 N和0.034 N,介入时间分别为25.8 s和52.8 s。虽然匀速介入方法需要的时间更短,但是其需要的平均介入力更大,并且在形状板1和形状板2中的最大介入力分别达到了0.18 N和0.1 N,均远大于间歇式介入方法的最大介入力。匀速介入方法的介入力的尖峰出现在阻塞发生时,继续前进会导致挤压力持续增加。而间歇式介入方法能通过机器人后退重新调整其形态减缓这种影响,从而实现柔顺介入。

图8 介入实验
中国科学院沈阳自动化研究所博士生黎定佳为论文第一作者,中国科学院沈阳自动化研究所研究员刘浩为论文通信作者。该文得到了国家重点研发计划(2023YFB4705700)、国家自然科学基金(U20A20195,62333014)和辽宁省重点研发计划(2024JH2/1024000492024)的支持。


识别二维码,访问全文PDF
联系我们 :

电话:024-23970050

E-mail:jqr@sia.cn

网址:https://robot.sia.cn