许多自驾和传统机器人公司,已经开始成立具身实验室了......
今天在和朋友喝下午茶,聊到了很多公司开始筹建具身团队和业务线。其中不乏有自动驾驶公司、主机厂、新势力、传统机器人公司、传统臂商。
貌似又到了那个谁不入场就会被时代抛弃的时候,先不妨看看这几类公司的出发点吧。对于自驾公司和主机厂,他们想做的更多是解决工厂智能部分,造车需要大量的工人,包括制造、搬运、特殊场景的需求。如果机器人能够在固定场景下完成相对智能,那么能省下不少成本。

对于传统机器人公司来说,比如扫地机器人公司,他们更希望升级已有产品,具备更加智能的服务。比如扫地机上添加机械臂,用户可以下达指令完成清扫之外的工作以及通过大模型实现更好的交互功能。传统臂商,也想进一步参与臂的智能化升级,适配更加泛化和多样的场景。
当然,也不排除很多公司通过投资新兴产业来赚取更多的利润。但这个趋势会导致,很多公司的资源倾斜到具身领域。无论是数据生产模块还是算法、本体层面。很多公司的具身岗位存在缺口,一些没有经验的leader不得不扛起大旗!持续的面试仍然招不到合适的,因为真的懂的人很少。
归根到底是没有系统的培养体系,导致这方面的人才出现了数量和质量的不足。前面我们在社区内给大家梳理了很多具身技术子领域的学习路线,大家可以好好学习下,助力成为一个真正懂具身的从业者。如果您还不是我们的成员,欢迎加入我们,和近200家具身公司与机构成员一起交流。

“具身智能之心知识星球”是我们一直在维护的具身社区,目前集视频 + 图文 + 学习路线 + 问答 + 求职交流为一体,是一个综合类的具身社区,近2000人了。我们期望未来2年内做到近万人的规模。给大家打造一个交流+技术分享的聚集地,是许多初学者和进阶的同学经常逛的地方。
社区内部经常为大家解答各类实用问题:如何使用设备?如何有效采集数据?如何部署VA、VLA模型等。是采集背景太复杂还是数据比较dirty? 快速解答,方便大家应用到项目中。
一个社区能在大家最需要帮助的时候解决问题,无疑是非常有价值的。具身智能之心知识星球(国内首个具身全栈技术社区),目前已经完成了产业、学术、求职、问答交流等多个领域的闭环。遇到什么问题就分享什么解决方案,哪块研究最前沿,就给大家源源不断提供解决思路,还有求职岗位第一时间对接给大家!除了上面的问题,我们还为大家梳理了很多其它的内容:
机器人仿真和数据采集有哪些平台? 人形机器人怎么做模仿学习?VLA为什么难做? VLA在机器人抓取与规划任务中是怎么用的? VLA+RL是怎么做的?为什么work? sim2real效果不好怎么办?real2sim2real是怎么work的? 分层决策一般是怎么做的?和端到端比优势劣势有哪些? 具身机器人的研报有哪些?30家汇总 多家头部具身机器人公司岗位分享招聘 具身智能,如何选择研究方向?哪个方向容易出成果? ......
更有料的是:星球内部为大家梳理了近30+技术路线,无论你是要找benchmark、还是要找综述和学习入门路线,都能极大缩短检索时间。星球还为大家邀请了数十个具身领域嘉宾,都是活跃在一线产业界和工业界的大佬(经常出现的顶会和各类访谈中哦)。欢迎随时提问,他们将会为大家答疑解惑。
除此之外,社区还为大家准备了很多圆桌论坛、直播,从本体、数据到算法,各类各样,逐步为大家分享具身行业究竟在发生什么?还有哪些问题!

星球还和多家具身公司建立了岗位内推机制,欢迎大家随时艾特我们。第一时间将您的简历送到心仪公司的手上。

针对入门者,我们整理了许多为小白入门的技术栈和路线。

已经从事相关研究的同学,我们也给大家提供了很多有价值的产业体系和项目方案。

这里是一个认真做内容的社区,一个培养未来领袖的地方。欢迎加入我们,和我们一起共建行业。
国内首个具身全栈社区:具身智能之心知识星球
社区创建的出发点是给大家提供一个具身相关的技术交流平台,交流学术和工程上的问题。星球内部的成员来自国内外知名高校实验室、具身相关机器人头部公司,其中高校和科研机构包括但不限于:斯坦福大学、加州大学、清华大学、西湖大学、上海交大、上海人工智能实验室、港科大、港大、南洋理工、新加坡国立、ETH、南京大学等;公司包括但不限于:智元机器人、有鹿机器人、云深处、优必选、傅里叶机器人、开普勒机器人、小米、星海图、银河通用、星尘智能、逐际动力等。
我们为大家汇总了近40+开源项目、近60+具身智能相关数据集、行业主流具身仿真平台、以及各类技术学习路线,包括但不限于:
| 强化学习全栈学习路线 | VLN学习路线 |
| VA/VLA学习路线 | 多模态大模型学理解 |
| 多模态大模型学生成 | Diffusion Policy学习路线 |
| 多传感器融合标定 | 机械臂抓取位姿估计 |
| 机械臂的策略学习 | 大模型与机器人路线 |
| 双足与四足机器人 | 具身智能与大模型部署 |
| 触觉感知学习路线 | 机器人导航学习路线 |
| sim2real学习路线 | 具身世界模型学习路线 |
| 机器人规划控制 | 数据采集 |
| VLA+RL |
这里能够让小白快速入门,让已经入门的同学进一步提升,已经提升的同学结交更多的朋友。
加入星球有哪些福利?
第一时间掌握具身智能相关的学术进展、工业落地应用; 和行业大佬一起交流工作与求职相关的问题; 优良的学习交流环境,能结识更多同行业的伙伴; 星球内部专属学习视频,搭配文档不枯燥; 具身智能相关工作岗位推荐,第一时间对接企业; 行业机会挖掘,投资与项目对接
星球内容一览
0)国内外具身智能高校汇总
星球内部为大家汇总了具身智能多个研究方向的国内外知名实验室,供大家后期读研、申博、博后参考。

1)国内外具身智能公司汇总
星球内部为大家汇总了各类国内外各类具身相关机器人公司,涉及教育、宠物、工业、救援、物流、交互、医疗等方向。

2)具身智能研报汇总
星球内部为大家汇总了大模型、人形机器人等行业相关的研报,第一时间了解行业的发展与工业的落地情况。


3)机器人相关书籍汇总
星球内部汇总了机器人导航、概率机器人、机器人动力学与运动学、路径规划、机器人视觉控制等多个方向的PDF书籍,供大家做基础学习。

4)具身智能零部件品牌汇总
我们内部为大家汇总了机器人行业知名的零部件制造厂商,涉及芯片、激光雷达、相机、IMU、底盘等。

5)开源项目汇总
星球内部针对机器人仿真项目、机器人抓取、机器人控制、具身交互、具身感知等多个领域的开源项目进行了汇总,助力快速上手。

6)ToF与3D相机
为大家汇总了国内外知名ToF厂家、相关产品、技术手册、综述等内容。

7)数据采集与开源数据
内部针对遥操方案、动作捕捉、AR等方案进行了汇总!

除此之外,还针对具身感知、触觉感知、导航、问答、大模型、视觉语言模型、端到端、机械臂抓取、控制规划多个领域的开源数据集进行了汇总,再也不用担心找不到可用的数据集了。

8)具身智能仿真平台汇总
星球内部针对通用机器人仿真平台和真实场景仿真平台进行了汇总,机器人仿真这里全都有!

9)强化学习/VLA+RL
我们为大家汇总了基于LLM的强化学习、可解释强化学习、深度强化学习主流方案,一览各个子领域的应用训练。
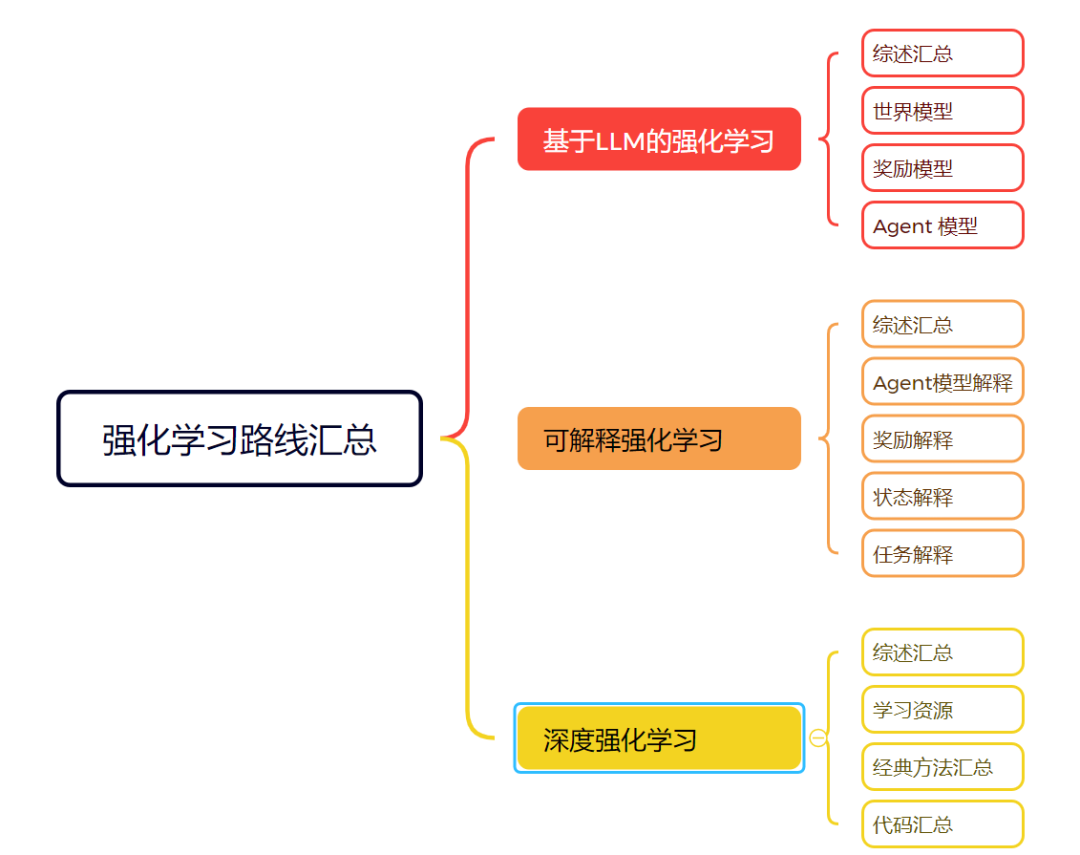
除此之外,还汇总了目前大火的VLA+RL工作。

10)具身智能感知学习路线
内部针对主动视觉感知、3D视觉感知定位、视觉语言导航、触觉感知等多个任务进行了汇总,具身感知路线,一网打尽。

11)具身智能交互
星球内部为大家汇总了具身智能与环境交互相关工作,涉及抓取、检测、视觉语言模型、具身问答、gaussian splatting等多块内容。

12)视觉语言导航
针对视觉语言导航、规划等多个应用内容,星球内部进行了详细的汇总,关注自动驾驶与机器人应用。

13)触觉感知
我们汇总了触觉感知最新综述、传感器应用、多模态算法集成、数据集等多项内容,让大家对这一前沿应用有着深刻了解。

14)多模态大模型理解
星球内部汇总了大量多模态大模型理解相关内容, 包括但不限于Image+Text到Text、 Video+Text到Text、 Audio+Text到Text、 3D+Text到Text、Many到Text等。

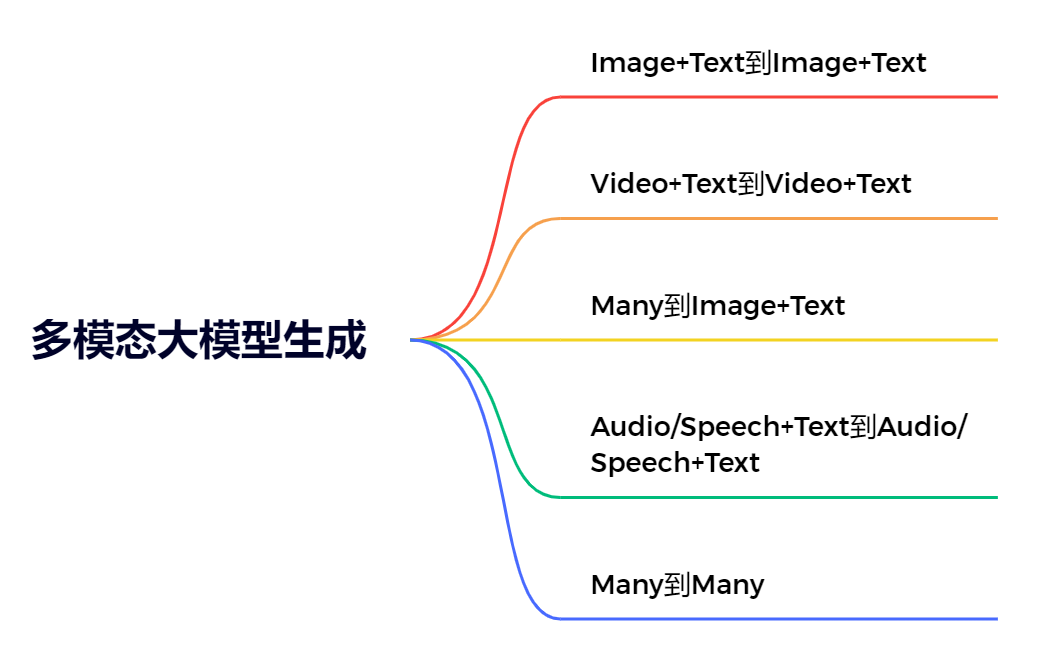
15)多模态大模型生成
除了多模态大模型理解,星球内部也汇总了大量多模态大模型生成相关内容,包括Image+Text到Image+Text、Video+Text到Video+Text、 Audio/Speech+Text到Audio/Speech+Text、Many到Image+Text、Many到Many等。
16)大模型微调与量化推理

17)VLA/VA相关
内部为大家汇总了主流的VA/VLA模型相关内容,一览最新视觉-语言-动作相关进展。

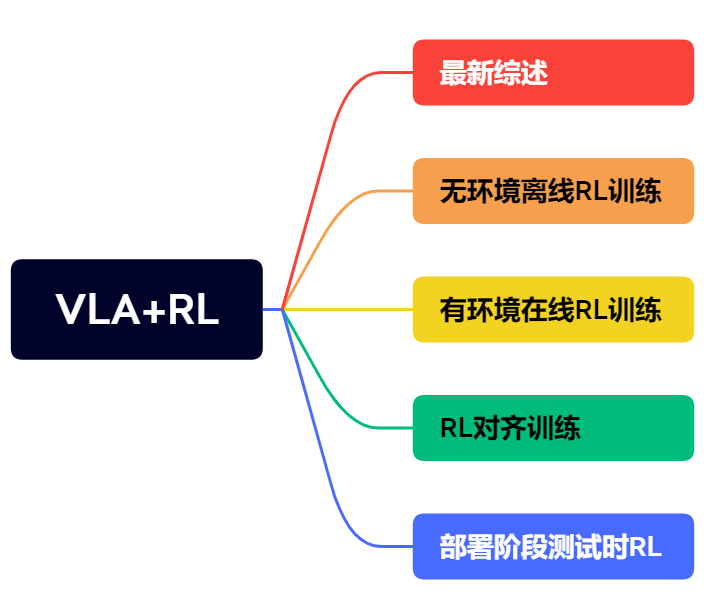
18)VLA+强化学习
这里也为大家汇总了最近比较火的VLA+RL相关的工作,前沿内容一览无余。
19)Diffusion Policy
针对扩散模型设计、Diffusion Policy具体任务应用、Diffusion Generation等进行了汇总;

20)机器人导航与规划

21)大模型部署相关
针对大模型部署框架、大模型轻量化方法等进行了汇总,助力落地。

22)sim2real

23)物理仿真与世界模型

24)机械臂抓取
针对机械臂抓取、任务数据表示、位姿估计、策略学习多个部分展开了汇总。

25)双足与四足机器人
星球内部对开源的双足与四足机器人项目、仿真、源码、硬件等部分进行了详细的汇总,助力从零搭建你的机器人。

26)四足/轮式+机械臂
针对常用的移动+执行硬件方案进行了汇总,助力大家快速搭建属于自己的系统。

星球内部交流
星球成员可以在星球内部自由提问,无论是工作选择还是研究方向选择,都能得到解答~



加入我们
开学季大额优惠,微信扫码加入~~~