作为人形机器人产业中最具想象空间、技术含量也最高的核心部件,灵巧手正迎来它的起飞时刻。
一边是本体企业集体冲刺商业化,灵巧手的装机需求水涨船高,行业年出货量有望迈向“万台”门槛;另一边,则是新玩家蜂拥而至,据高工人形机器人不完全统计,国内推出灵巧手产品的企业已超过二十家,随着初创企业不断浮出水面,资本挥舞着钞票加速下注。
更有趣的是,许多本体厂商也不得不拨出宝贵研发人力,亲自下场攻克这个“研发成本高到能吞掉整机一半工作量”的关键部件。
原因无他,正如不少创始人的无奈吐槽:“市面上根本没有能用的灵巧手。”
但越是格局未定、门槛不清的新生赛道,越吸引真正懂技术、看长线的创业者下场搏杀。
今日,灵巧手创业公司源升智能宣布完成数千万元天使++轮融资,由弘晖基金与春华创投共同领投。这是其今年完成的第4笔融资,累计金额已近亿元。本轮资金将主要用于产品的量产爬坡、技术研发与团队扩充。

这距离他们上一轮融资,还仅仅过了不到一个月。2025年8月,源升智能完成数千万元天使+轮融资,由千乘资本领投,浔商创投和老股东昆仲资本跟投。
频繁的融资动作背后,是资本对灵巧手赛道的普遍期待,但让源升智能被行业关注的真正起点,正是他们刚刚发布的灵巧手Apex Hand。
“六边形战士”的灵巧手长什么样?
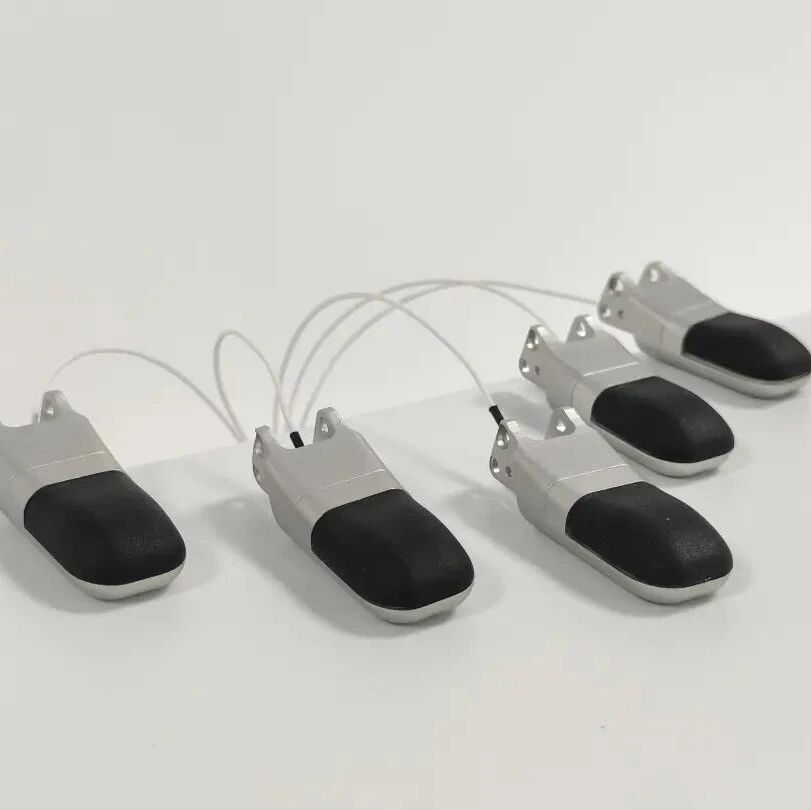
今年8月,源升智能首次公开了其自研五指灵巧手产品Apex Hand,并同步发布了一段实机演示视频。在源升智能创始人兼CEO杨思成看来,这款产品的目标从一开始就不是追求单项性能的极限值,而是“在六大核心能力上做到均衡且可用”的“六边形战士”。
在演示视频中,Apex Hand围绕灵巧性、动态性能、负载能力、鲁棒性、感知能力与精度六个维度,展现出高度工程完成度:
• 高灵巧度:拥有21个自由度(16个主动),可覆盖人手33种抓取模式;是目前市面上首个可实现单手操控手机的灵巧手,并满分通过了Kapandji(对指测试)灵活度测试。
•高精度:重复定位误差小于0.1mm,接近零背隙传动,支持狭小空间内的光滑物体稳定抓取。
• 高动态性能:1kHz控制频率,响应速度接近人手,在演示中完成“笔落瞬间抓取”。
• 高负载能力:指尖可施加2.5kg力量,能够戳穿1cm木板,整手垂直提拉力接近30kg。
• 高鲁棒性:面对撞击、磕碰等外部扰动,依然保持结构与控制稳定,具备基础抗打击能力。
• 全感知能力:搭载自研电子皮肤,具备压力、切向力等多维感知能力。
在触觉方案上,源升智能选择了自研压阻式传感器。杨思成指出,和市面上的压阻式触觉传感器不同,Apex Hand的传感器具备柔软特性,可完整贴合手部结构,并实现对切向力的直接感知,刷新频率超1000Hz,兼顾“感知密度”与“系统响应”。

但真正决定一款灵巧手能否落地的,从来不是纸面上的参数,而是它在真实世界的可靠性与稳定性。这也是源升智能在开发Apex Hand的另一个重点。
灵巧手的第一道门槛,是一周不坏
市面上已有不少演示参数亮眼的灵巧手,但许多本体技术人员依然表示:“灵巧手的纸面性能很漂亮,但就是用不起来。”
磕碰、撞击、误操作,在研发、数采与工业场景中是常态,而目前许多灵巧手产品的可靠性,“能连续用一周不坏就已经谢天谢地了”。

对于这点,杨思成表示:“相比于自由度和其它单点性能,灵巧手要落地的话,鲁棒性是不可或缺的指标。
为此,源升智能做了大量优化设计与真机测试:
Apex Hand采用绳驱方案模拟人手肌腱传动结构,天然具备一定柔顺性,能够吸收冲击。但杨思成强调,他们并未直接照搬市面上的主流结构,“绳驱容易做高自由度,但维护难、寿命短,我们针对这些都做了系统性优化。”
此外,Apex Hand支持反驱力控,所有关节均无结构自锁,碰撞时可主动卸力,进一步提升动态适应性。配合其柔软的自研皮肤包覆,相较于传统外壳坚硬的灵巧手,Apex Hand在遭遇物理冲击时更难损坏。

Apex Hand可戳破1cm厚木板
据透露,产品demo亮相后,已有覆盖科研、自动化、数采与人形本体厂商等海内外上百家客户表达了采购意向。
“我们不等风,我们造风”
源升智能能够持续获得资本加码,也与两位“腾讯系”技术派创业者的背景密切相关。
创始人杨思成和联合创始人李望维,均出身于腾讯 Robotics X 实验室,这是腾讯旗下致力于机器人前沿技术的研究与应用的企业实验室。
源升智能成立于2024年12月,创始人杨思成毕业于北航与清华大学,2018年,杨思成加入腾讯 Robotics X 实验室任高级研究员,是最早一批加入腾讯Robotics X实验室的核心成员。
联合创始人李望维博士毕业于新加坡国立大学,拥有超过十年的触觉传感器研发经验,是腾讯Robotics X实验室前触觉感知系统总负责人。
谈及主动创业的原因,杨思成给出的答案非常直接:不是当“等风人”,而是当“造风者”。
首先是能力层面的成熟。源升智能团队从学校开始就在做相关方向的工作,这么多年的积累让其对自己的技术有足够的信心。他们已完整打通了灵巧手从0到1的技术路径,踩过工程化过程中几乎所有“坑”,因此已经很有信心能把一款高自由度、高鲁棒性的灵巧手做出来。
但更重要的是,行业到了“非做不可”的时候了。他认为具身智能的“上半身操作智能”才是落地的关键,一旦进入物理世界的精细操作阶段,灵巧手就是必需品,而不是选配件。没有一只好用的手,具身大模型就永远训练不出通用操作智能。
杨思成说得很清楚:
“我们不是那种看行业风口起来了,就冲进来的‘等风人’,我相信我们做的这件事,能让行业走得更快一点。我们更愿意做那个‘造风者’。”
结语
在“灵巧手是关键”的行业共识之后,难题反而才刚刚开始。
问题已经不在于“要不要做”,而是“做出来能不能用”:技术方案设计是否合理,触觉感知够不够稳定,能不能撑过长时间运行,能不能高效支持大模型的数采训练。
入局者不少,但真正具备工程能力,愿意走上这条高耦合、高门槛、低容错路径的玩家,并没有想象中那么多。
等风来的人太多了,行业真正需要的,是造风者。