加入“知识星球”即可获取完整资料:

“我们只能看见前方很短的一段路,但那里已经有很多事情要做。”——艾伦·图灵
“We can only see a short distance ahead, but we can see plenty there that needs to be done.” — Alan Turing
01
1. 灵巧手在人形机器人上的使用必要性 & 列举刚需场景 + 应用前景判断
使用必要性
灵巧手(dexterous hand)是人形机器人末端执行器中最关键的组成部分,其必要性主要体现在以下几点:
通用性 / 多样任务能力:人形机器人若只用简单钳爪/夹具,就很难完成多种形式的握取、操作、工具使用等动作。灵巧手使机器人能“像人一样操作”,大大扩展任务种类。
环境适配性:人类环境中大多数设施、工具、电器开关、门把手等,是为人手设计的。要与人类环境无缝交互(家庭、办公、公共设施等),灵巧手非常必要。
精细操作需求:很多任务要求精确控制力、姿态和接触,例如拧螺丝、捏取脆弱物品(鸡蛋、水果)、系鞋带、穿线等。这些动作对抓握柔顺性和触觉反馈要求高,没有灵巧手难以实现。
人机交互与安全性:在人际环境或服务/医疗环境中,灵巧手若带有触觉/力觉反馈,可更安全柔和地与人或物体交互,减少损坏或伤害。
列举几个“刚需”的应用场景
下面是一些几乎无法替代或效果差异巨大的场景,灵巧手在这些场景中是“刚需”:

应用前景判断
基于目前技术进展、市场需求与产业政策支持,可以做如下判断:
短期(1-3年):在工业(电子、汽车零件)、仓储/物流、科研实验室中灵巧手会被更多采用;人形机器人的整机应用虽有原型与展品,但量产与广泛部署还有限。
中期(3-5年):随着成本下降(关键零部件国产替代)、可靠性提升(寿命、维护少)、模组标准化/模块化,灵巧手在服务机器人、医疗康复和假肢领域会进入真正的小规模常用阶段。
长期(5-10年):如果人形机器人能够在多个行业(按需要替代人力或辅助人力)落地,灵巧手将成为标配;假肢领域也可能实现与肌肉/神经接口更好的融合;市场规模可能达到百亿~千亿人民币级别;与人工操作差距进一步缩小。
02
2. 国内灵巧手主要技术瓶颈;路线是否有收敛;当前研发进展与主流方向
主要技术瓶颈(国内为主,也兼顾国外共性)

技术路线是否有收敛
从公开资料来看,是有向若干主流路线或设计理念收敛的趋势,虽还未统一标准:
驱动方式主流为电机+柔性传动(腱绳/丝杠/混合)组合,液压/气动路线被逐渐削减或用于特定应用。
自由度的数目正在趋向一个折中区间:很多高自由度设计(20-30 DOF)出现,但为了成本与可靠性,某些产品在实际工业/服务场景中会做自由度剪枝(例如15-20 DOF)以平衡性能与系统复杂性。
传感整合(触觉 + 位姿/力/滑动/摩擦)变成主流需求;电子皮肤、多模态感知融合(视觉+触觉)在多个产品中都被提及。
模块化与标准化开始被重视:手指模块 / 驱动模块 /接口标准 /可替换指尖/可替换传感器等设计已见端倪。
当前国内研发进展与主流方向
自由度与功能提升:国内公司(灵心巧手、Unitree 宇树 Dex5 等)已经发布五指灵巧手产品,自由度达到或接近 20 个主动 + 被动+触觉点。Unitree Dex5 拥有20自由度(16主动+4被动),选配94个触觉点。
触觉/传感器整合:国内企业像灵巧智能、帕西尼感知等在力/触觉传感器自主可控方面投入较大。帕西尼被认为在多维触觉“传感器—灵巧手—人形机器人”产品矩阵上较为完整.
成本与批量交付:一些企业接近年产千套交付能力,如“八小豹”中的灵心巧手、因时机器人、宇树科技等几个已被评估或正在逼近这一规模。
资本与产业政策支持:本站融资活动频繁。如灵心巧手在 Pre-A / A 轮集数亿元融资;政府与地方引导资金也在推动灵巧手及人形机器人产业发展。
主流方向(技术+产品定位)
高自由度科研型 vs 实用型折中型:科研机构或高端公司追求极高自由度和灵活性;实用型产品则在精度/自由度/成本间做折中,选择实用自由度、模块化设计以降低成本/提高可靠性。
感知+控制融合:不仅是硬件提升,触觉传感、视觉套路、力控算法与 AI 控制策略成为竞争核心。
模块化与可替换性:手指/关节模块、可替换的传感器或指节、接口标准化是降低维护成本 &升级的方向。
本地化 /国产替代:零部件国产化(电机、减速器、传感器)是主流趋势,以降低成本与依赖。
场景导向设计:根据最终应用场景(工业/医疗/假肢/服务机器人)做差异化设计,而不是一个通用高自由度产品单打独斗。
03
3. 第一梯队 vs 第二梯队厂商 + 产品特点与技术成熟度点评(带几个现场展示案例)
下面是对各家厂商的分层 +产品特点 +商用成熟度,并带一些典型展示/案例。





关于“现场展示”的可见资料
Unitree 的 Dex5 五指灵巧手在展会/发布视频中有完整的动作演示,如玩魔方、翻书、握物等。
灵心巧手的 Linker Hand 在高校和研究机构中有实物使用(斯坦福、清华等实验室)。
特斯拉在人形机器人发布/技术演示会中展示了手部具备基本操作能力(工具、物体抓取等)。
国内媒体报道中也多次提及戴盟机器人的灵巧手在展会中的“实验助手”“家庭助手”角色演示。
04
4. 灵巧手成本拆解 + 行业平均水平
把灵巧手看作一个高度集成系统,其成本构成可以分为以下部分。下面是拆解 +一些公开数据 +平均水平(国内/国际)估测。

行业平均水平(估算)

例如,据资料:
国内市场平均价格约 5.78 万元/只。
“八小豹”中接近千套交付能力的企业,其产品多数在几万元区间。
国内外差异
国外尤其是科研或高端工业级灵巧手在 驱动精度、寿命、材料等级、触觉反馈密度 等方面有更高规格,造价高;在批量上少,故成本难以摊薄。
国内厂商依托更低的人工和制造成本,加速国产零部件替代,材料及零件本地化较高,已使得成本大幅压低。
不同产品定位差别极大:科研/高端型 vs 实用/普及型,在规格与成本之间折中选择的不同导致价格区间宽。
05
5. 从全产业链视角:最具创新活力/市场空间大的环节;初创公司易进入部分;看好的初创公司
产业链环节划分
产业链可简化为三大部分:
1. 上游核心零部件与材料:微型电机、减速器/传动组件、触觉/力觉传感器、柔性材料/电子皮肤、高强度轻质材料、连接接口等。
2. 中游整机集成与系统设计:结构设计(自由度布局、手形手指/父掌机构)、传动+驱动方案集成、装配/校准、控制电子、软件系统、嵌入 AI/控制算法。
3. 下游应用与定制/服务:在人形机器人整机、服务机器人、医疗器械/假肢、仓储物流、家庭服务等场景的落地、场景适配、售后维护、用户体验、安全标准、认证等。
哪些环节最具创新活力 & 市场空间更大;初创公司易进入

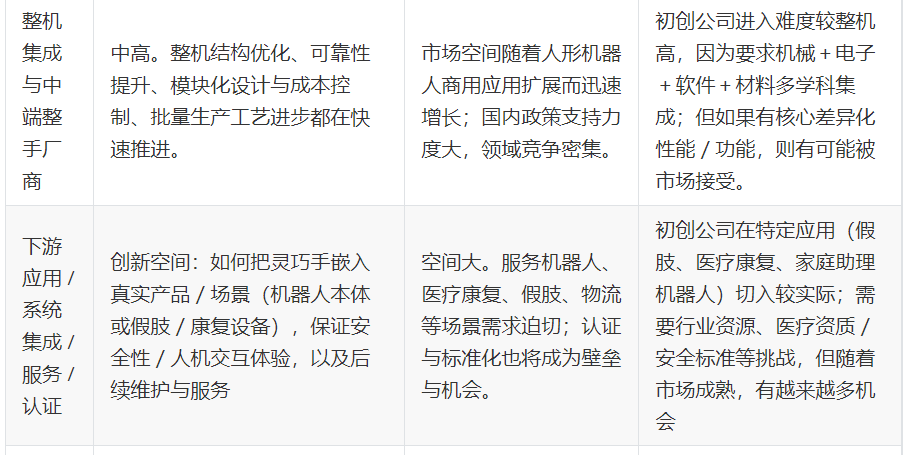
看好的高成长性初创公司
基于我查到的资料,以下几家国内外初创公司/企业在其细分环节中表现突出、成长潜力高(技术 +市场 +资本支持均有):

加入“知识星球”即可获取完整资料: