9月9日
据成都人形机器人创新中心消息
该中心基于世界模型
完成了全国首个
机器人任务执行系统R-WMES
通过给到机器人一个“我想达成”的目标的图片,机器人自动判断现有的状态,并自主规划任务和执行任务,最终达到与目标图片相符合。
在该中心提供的视频中,成都人形机器人创新中心做了两段演示。其中一段演示中,给到机器人一个插有吸管的玻璃瓶的图片作为目标。机器人通过对现场环境的观察,看到了一个没有吸管的玻璃瓶。通过在隐空间规划,R-WMES系统规划出完成任务的完整机器人动作:需要机器人抓取一根吸管插入玻璃瓶,以达到预设目标图片(带吸管的玻璃瓶)一致的效果。
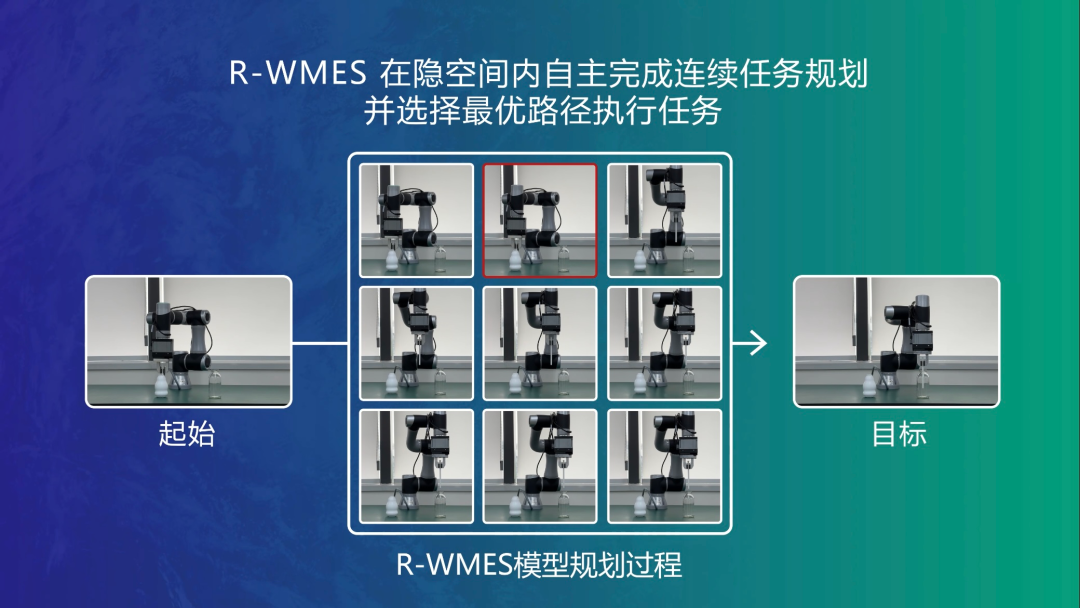
▲视频演示截图
据介绍,机器人世界模型由4大要素组成,他们是:任意指定目标(Any Specified Target)、隐空间规划(Latent Space Planning)、动态物理交互(Dynamic Physical Interaction)、视角变换(View Transformer)。
R-WMES 在本次成果中率先实现了在陌生环境中无监督训练(Unsupervised Training)的任务执行,展示了其任意指定目标(Any Specified Target)和隐空间规划能力(Latent Space Planning)。值得一提的是,R-WMES也实现了中国在机器人世界模型上零的突破,为人形机器人更聪明、更接近人类思考推理方式打下了坚实的基础。

▲视频演示截图
世界模型是目前人工智能与人形机器人技术竞争的最高地。越来越多的机构和学者认为,如果希望 AI 具备真正的类人智能,不能仅依赖数据驱动的模式匹配,真正的智能应包含对物理规律的建模能力以及对环境变化的内部模拟机制。这就是世界模型。
来源:红星新闻







你“在看”吗?
↓↓↓