在机器人研发领域,我们往往习惯于仰望那些明星公司,比如波士顿动力,它们的后空翻机器狗、跑酷的Atlas,总是能轻易成为话题焦点。然而,在聚光灯之外,另一股力量正悄然生长:它们不属于某一家巨头公司,而是来自全球开发者与研究者的共同智慧,即开源机器人的世界。
在人形机器人研究领域,开源双足平台正成为推动技术民主化的重要力量。然而,当前大多数开源双足机器人依赖3D打印技术,虽具有成本低、制造便捷和造型灵活的优点,却难以突破材料本身的强度限制,无法胜任高动态、高负载的运动任务。另一方面,少数基于金属结构的开源机器人,则因依赖传统加工方式,存在零件数量过多、装配复杂、采购困难等现实瓶颈。
在东京大学JSK机器人实验室有这样一支团队,他们希望通过开放源代码的方式,让更多人能够参与到人形机器人技术的研发中来,共同推动这一领域的发展。经不懈努力,该团队前不久正式对外推出了开源双足机器人MEVITA,在arXiv上以“Multi-modal Embodied Vision Intelligence for Task Automation”为题公开了该机器人研究的相关过程,并在GitHub项目主页上,毫无保留的向大家公开了MEVITA从机械结构到控制算法,从传感器校准到运动规划的所有技术细节。
▍突破材料与制造瓶颈,重新定义开源双足机器人
具体来说,研究团队在面对上述挑战时,在确保MEVITA的整体机械结构完全采用金属材料的基础上,通过电商平台采购和模块化设计,显著降低了制造与复现的难度。MEVITA的所有机械及电子部件,包括结构连杆和关键关节组件,均可通过MISUMI及其在线制造服务meviy实现一站式采购,极大地提升了项目的可及性和可扩展性。

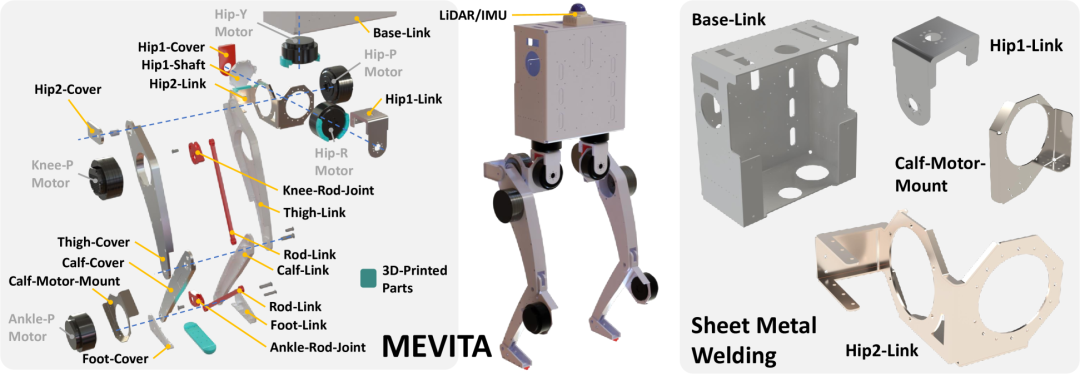
在机械设计上,MEVITA追求极简主义。它采用5自由度腿部构型,髋关节为经典的偏航-滚转-俯仰(YRP)配置,并在膝、踝关节引入平行连杆机构,有效降低运动惯量、提高响应速度。最值得注意的是,MEVITA仅凭18个独特的金属零件便完成了整机构建,这一数量远低于同类金属机器人的部件需求。这一突破性成就归功于其广泛应用的金属板焊接工艺,该工艺将传统上需多个零件拼接的复杂结构,如机器人躯干(Base-Link)和髋部连杆(Hip2-Link),成功集成为单一部件,既显著提升了整体性,又极大简化了装配流程。
除却在机械方面追求精简,MEVITA的电路设计也体现了高度集成与务实思路。它搭载NVIDIA Jetson Orin Nano作为主控,通过CAN总线协调关节电机,并配备Livox Mid-360激光雷达,同时实现定位、环境感知与姿态测量。电源系统采用双电池方案,分别提供电机驱动与逻辑电平所需电压,并集成无线急停机制,保障操作安全。

在控制层面,MEVITA整合了当前最先进的Sim-to-Real(从仿真到现实)迁移学习方法。研究人员利用IsaacGym平台,通过强化学习对运动策略进行训练,随后在MuJoCo环境中进行仿真验证,最终将成果应用于实体机器人。通过引入如随机调整质量、惯量、摩擦系数及通信延迟等多种域随机化策略,MEVITA显著提升了环境适应能力,能够在草地、泥地、砖面、斜坡等多种复杂地形上稳健行走。

▍多地形行走测试评估,展现MEVITA 初步适应能力
为了评估训练策略的实际应用效果,研究团队将 IsaacGym 中训练完成的控制策略分别部署到 MuJoCo 仿真环境和真实的 MEVITA 机器人中,并对两者的行为差异进行了比较。
如下图所示,机器人在跟踪线性速度与角速度指令,执行前进、横向移动和旋转等动作时,能在仿真和现实环境中均能较好地响应指令。尤其在旋转运动中,仿真与实机运行结果的差异很小;而在平移运动中,实际机器人的速度误差略大于仿真环境。

进一步地,MEVITA 在多种真实地面环境下接受了步行测试,包括室内不平整地面、草地、泥土地、混凝土砖地面和缓坡。实验表明,机器人在这些不同介质和地形条件下均实现了基本稳定的步行行为。

然而,当前策略下的运动仍存在一定局限性。例如,机器人在静止站立时的稳定性反而低于行走状态,表明控制策略仍需进一步优化。此外,在较高速度下执行横向移动时,偶尔会出现脚部被地面卡住或失去平衡的情况。
这些现象说明,尽管 MEVITA 表现出了初步的环境适应能力,但在仿真与现实之间的策略迁移,尤其是从真实数据反馈至仿真优化的“真实到模拟”闭环,仍需更深入的研究和算法改进,以提升其在复杂条件下的运动稳定性和鲁棒性。
但总的来说,MEVITA 的出现不仅弥补了传统3D打印机器人强度不足和全金属机器人难以复现的空白,更展示了一种结合先进制造、电商化供应与学习型控制的机器人发展新路径。它既是一款高性能的研究平台,也是一个完全面向开源社区的资源项目,预计将显著推动双足机器人技术在全球范围内的创新与普及。
参考文章:https://arxiv.org/html/2508.17684v1#abstract
如需咨询企业合作事宜,欢迎联系机器人大讲堂-客服(19560423866,手机与微信同号)进行对接。
----------------END-------------------

工业机器人企业
埃斯顿自动化 | 埃夫特机器人 | 非夕科技 | 法奥机器人 | 越疆机器人 | 节卡机器人 | 松灵机器人 | 珞石机器人 | 盈连科技 | 集萃智造 | 优傲机器人 | CGXi长广溪智造 | 阿童木机器人 | 极智嘉
服务与特种机器人企业
医疗机器人企业
元化智能 | 天智航 | 思哲睿智能医疗 | 精锋医疗 | 佗道医疗 | 真易达 | 术锐®机器人 | 罗森博特 | 磅客策 | 柏惠维康 | 迪视医疗 | 水木东方
人形机器人企业
优必选科技 | 宇树 | 云深处 | 星动纪元 | 伟景机器人 | 逐际动力 | 乐聚机器人 | 大象机器人 | 中科深谷 | 魔法原子 | 众擎机器人 | 帕西尼感知 | 赛博格机器人 | 数字华夏 | 理工华汇 | 傅利叶智能 | 天链机器人 | 开普勒人形机器人 | 灵宝CASBOT | 清宝机器人 | 浙江人形机器人创新中心 | 动易科技 | 智身科技 | PNDbotics
具身智能企业
跨维智能 | 银河通用 | 千寻智能 | 灵心巧手 | 睿尔曼智能 | 微亿智造 | 推行科技 | 中科硅纪 | 枢途科技 | 灵巧智能 | 星尘智能 | 穹彻智能 | 方舟无限 | 科大讯飞 | 北京人形机器人创新中心| 国地共建人形机器人创新中心 | 擎朗智能 | 戴盟机器人| 视比特机器人 | 星海图 | 月泉仿生 | 零次方机器人
核心零部件企业
绿的谐波 | 因时机器人 | 坤维科技 | 脉塔智能 | 青瞳视觉 | 本末科技 | 鑫精诚传感器 | 蓝点触控 | BrainCo强脑科技 | 宇立仪器 | 极亚精机 | 思岚科技 | 神源生 | 非普导航科技 | 锐驰智光 | NOKOV度量科技 | 因克斯 | 褔德机器人 | 巨蟹智能驱动 | 微悍动力 | 凌云光 元客视界 | 璇玑动力| 意优科技| 瑞源精密 | 灵足时代 | Xynova曦诺未来 | HIT华威科
教育机器人企业
加入社群
欢迎加入【机器人大讲堂】读者讨论群, 共同探讨机器人相关领域话题,共享前沿科技及产业动态,添加微信“robospeak2018”入群!


看累了吗?戳一下“在看”支持我们吧










