当前,神经系统疾病已成为全球第二大死亡原因。近年来,脑肿瘤、帕金森病、强迫症、癫痫等常见脑神经功能性重大疾病随年龄增长患病率显著上升,严重影响患者生活质量。目前临床常用的诊疗手段包括穿刺活检、深部电极植入、射频消融、肿瘤切除和局部给药等。

传统框架式立体定向手术依赖术前影像与框架匹配实现手动靶点定位,操作复杂且对医生经验要求较高;而无框式非磁共振兼容立体定向机器人手术虽通过机械臂与术前影像实现了自动靶点定位给,却因缺乏术中实时影像与颅内环境监测能力,难以应对术中脑组织漂移等问题。术中磁共振影像(MRI)引导技术可在手术过程中同步实现解剖结构与功能评估,动态适应组织形变并避开关键功能区,但其临床应用仍面临多自由度大范围运动与高精度定位难以兼顾、受限空间下长距离精准穿刺操作复杂,以及术中磁共振成像时空分辨率难以同时优化等挑战。此外,强磁场环境对机器人系统的材料、驱动与传感技术提出了严格的磁兼容性要求。
在这一背景下,国家重点研发计划“智能机器人”专项设立“脑神经介入核磁兼容穿刺机器人技术与系统”项目。该项目面向脑疾病精准治疗的迫切临床需求,聚焦驱动、感知、成像导航与植入器械四大核心方向,致力在气液混合宏微驱动、仿生蠕动穿刺、实时磁共振成像与导航、低伪影光纤力感知穿刺针等关键技术方面实现突破,构建具备术前-术中配准、路径规划与亚毫米级在体定位能力的智能手术机器人系统。
▍破局临床难题,实现高端装备国产化
近日,由上海交通大学医疗机器人研究院、上海市柔性医疗机器人重点实验室杨广中教授团队牵头承担的这一专项取得重要进展。该团队首创机器人气液宏微驱动、仿生蠕动穿刺针驱动及术中宏微磁共振成像技术,并提出了一种术中磁共振影像导航的脑神经介入手术机器人系统,即MRI引导机器人立体定向神经介入系统。
视频1 临床背景及研究成果总体介绍
目前,项目团队已成功研制出国际首台术中磁共振影像导航的气液混合驱动脑神经介入手术机器人。该机器人具备毫牛级力感知精度,二维成像时空分辨率达到1 mm/80 ms,样机定位精度达到亚毫米级,整体性能处于国际领先水平。在3T核磁系统下,该机器人样机已完成多轮详细功能和性能验证,并与瑞金医院等单位合作开展了多例人体标本与活体动物实验验证,表现出良好的临床适用性与稳定性。
该成果有效解决了当前脑神经介入磁共振兼容机器人普遍面临的精度有限、兼容性不足、工作空间受限和术中成像时空分辨率矛盾等关键问题,为推进脑神经介入手术的精准化、实时磁共振导航及磁共振微创诊疗一体化发展提供了重要技术支撑。同时,项目突破的关键技术与核心部件已实现国产化,推动了磁共振兼容驱动、传感、制造与系统集成技术的协同创新,为我国高端医疗装备自主可控与人民健康保障提供了有力支撑。

前不久,该项目最新研究成果的相关论文已以“Hybrid pneumatic-hydraulic actuation for MRI-guided robotic stereotactic neurointervention”为题,发表于《Science Advances》。论文共同第一作者为上海交通大学医学院附属同仁医院黄少平博士后与上海交通大学何钊博士后,通讯作者为上海交通大学杨广中教授、高安柱教授、冯原教授以及上海交通大学医学院附属瑞金医院孙青芳主任医师。研究得到了国家重点研发计划、国家自然科学基金及上海市科技专项等项目的资助,并受到工业和信息化部产业发展促进中心、磁共振诊疗高端技术国家工程研究中心、上海市科学技术委员会、上海市医疗机器人技术创新中心、上海市柔性医疗机器人重点实验室、上海交通大学医疗机器人研究院、上海交通大学生物医学工程学院、上海交通大学自动化与感知学院、上海交通大学医学院附属瑞金医院等单位的支持。
▍MRI引导机器人系统的实现与构成
项目团队所提出的术中磁共振影像导航的气液混合宏微驱动脑神经介入手术机器人硬件系统主要由两大核心部分构成,一个是8自由度气液混合宏微驱动立体定向系统,另一个是2自由度仿生蠕动式软体驱动器。该系统结合宏微磁共振成像技术,可在手术过程中可实现交互导航与闭环控制,并在接近目标时精确识别局部结构及针尖位置。

术中磁共振影像导航的气液混合宏微驱动脑神经介入手术机器人系统
8自由度气液混合宏微驱动立体定向系统
8自由度气液混合驱动立体定向系统包含4自由度气动宏驱动模块和4自由度液压微驱动模块。气动宏驱动模块负责大范围全局定位,其工作空间可充分覆盖人脑区域;液压微驱动模块采用双平面并联机构,用于局部精细调整。在3T强磁场环境中,该系统表现出良好的磁共振兼容性,磁共振图像信噪比损失不超过2.3%,几何畸变率低于0.18%,末端夹持点刚度达到12.04 N/mm以上,为脑神经介入手术提供了大范围、高精度的立体定向支持。

气液混合驱动脑神经介入机器人驱动架构设计与性能评估
2自由度仿生蠕动式软体驱动器
针对长距离穿刺操作中的精准性和稳定性需求,团队开发了一款2自由度仿生蠕动式软体驱动器。该装置受生物体蠕动机制启发,突破了传统刚性传动限制,能够在有限空间内实现穿刺针的旋转与输送运动。基于行波推送原理,驱动器可独立控制针体的旋转和平移动作。在1.2-1.7 Hz工作频率下,其平移速度超过0.2 mm/s,旋转速度大于0.5 rad/s,穿刺力高于0.8 N,最大锁定力可达13 N,表现出良好的锁紧性能和运动稳定性,有效解决了受限空间内长行程精准穿刺的操作难题。

仿生2自由度软体驱动器的设计与性能测试
视频2 仿生2自由度软体驱动器的动态性能仿真及测试
术中宏微磁共振成像技术
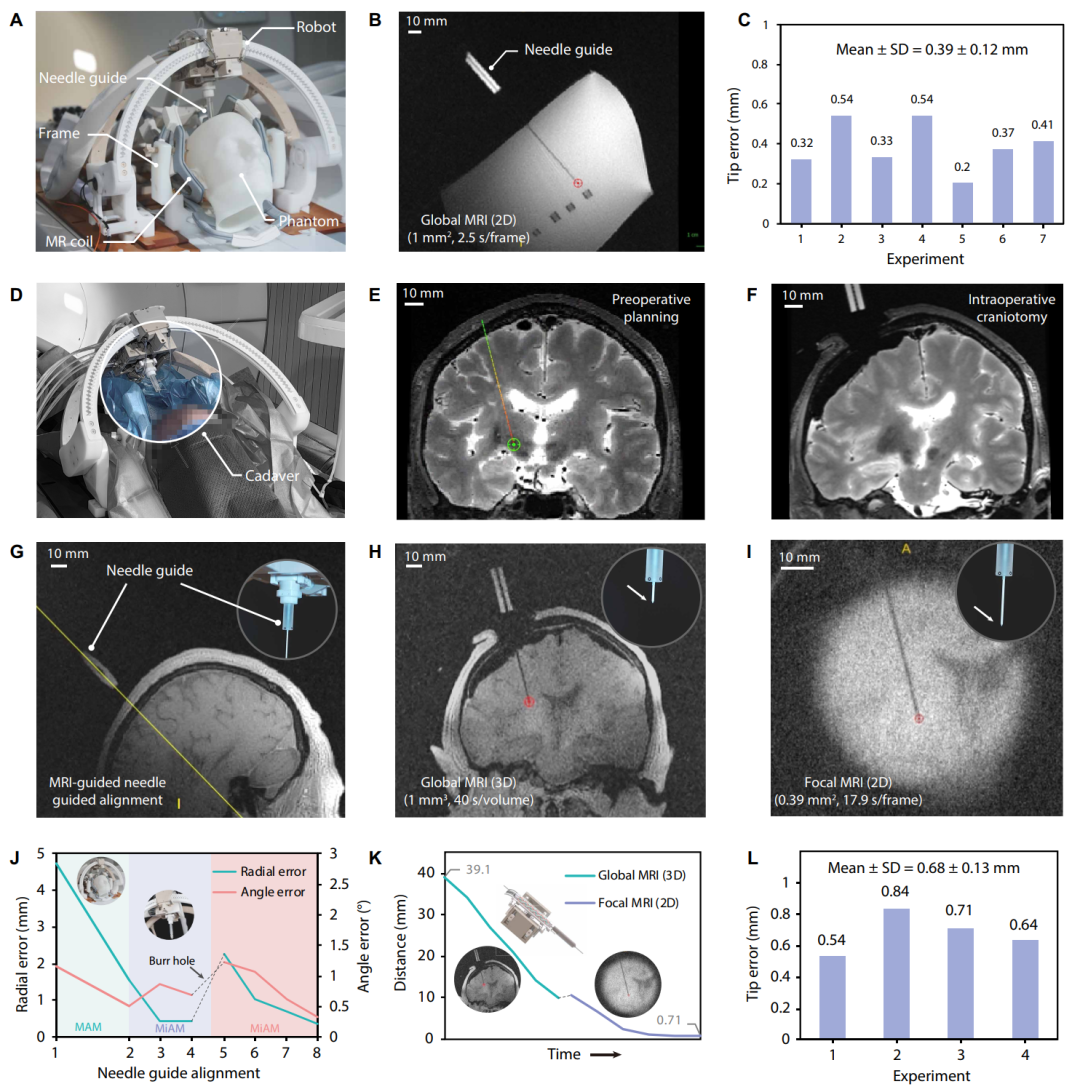
针对术中导航与精准定位的双重需求,项目团队开发了一种自适应的宏微磁共振成像策略以配合手术不同阶段的需求。在穿刺针远离靶点(大于等于10 mm)时采用宏成像模式,以1 mm²分辨率、每帧2.5秒的速度监控针体推进;当接近靶点(小于10 mm)时切换至微成像模式,分辨率提升至0.39 mm²,单帧用时17.9秒,实现精细引导。该rFOV-FSE序列相比全视野成像空间分辨率提高2.6倍,并有效抑制图像伪影。结合SAM算法,系统可完成亚像素级针尖跟踪,为机器人闭环控制提供高精度视觉反馈。

术中磁共振宏微成像技术
视频3 术中磁共振宏微成像动态展示
▍MRI引导机器人系统的多场景验证
为评估手术机器人系统的定位准确性,项目团队通过开展体模、人体标本及活体动物实验,就机器人定位精度、临床适用性和安全性等进行了验证。所有实验均基于术中磁共振成像引导条件下进行。穿刺操作使用外径1.6 mm的MRI安全陶瓷针,通过宏-微驱动组合完成路径对齐,并在实时MRI监控下执行进针。
体模实验验证定位精度
在仿人环境的体模实验中,项目团队采用明胶填充的3D打印人类头骨模型,其中嵌入孔状无磁标记作为目标点。通过术前MRI图像规划路径,由机器人系统对齐显影鞘管与规划路径。穿刺时先预插入约10 mm,再在全局MRI引导下由软体驱动器完成最终推进。七次不同靶点定位结果显示,针尖与目标点误差均小于1 mm,平均精度达0.39±0.12 mm,初步证明系统具备亚毫米级定位能力。
MRI引导机器人系统的模型验证和人体标本实验
人体标本实验验证临床适用性
为检验系统在接近真实手术条件下的表现,项目团队在四例人体标本中进行了实验。在术前MRI中规划底丘脑核(STN)为靶点,平均深度约65 mm。开颅后术中MRI发现明显脑结构或位置偏移,医生据此更新路径,导航系统重新发送数据并进行局部微调。术后MRI显示最终定位精度为0.68±0.13 mm,表明系统在应对术中解剖变化时仍保持高准确度。组织学分析显示针道最大宽度为1.79 mm,未见明显结构性破坏。
活体动物实验评估生物安全性
在活体猪动物实验中,以左侧伏隔核为靶点,术前及术中MRI均未发现显著结构偏移,机器人按计划路径完成穿刺。术后MRI确认定位误差仅为0.14 mm。病理切片经H&E染色和尼氏染色显示,穿刺通道位于白质区,未损伤神经元密集区域,周围细胞形态正常,表明该操作未引起显著组织损伤或炎症反应。

STN植入实验中的人体标本脑组织切片
参考文章:
https://www.science.org/doi/10.1126/sciadv.ady3624
如需咨询企业合作事宜,欢迎联系机器人大讲堂-客服(19560423866,手机与微信同号)进行对接。
----------------END-------------------

工业机器人企业
埃斯顿自动化 | 埃夫特机器人 | 非夕科技 | 法奥机器人 | 越疆机器人 | 节卡机器人 | 松灵机器人 | 珞石机器人 | 盈连科技 | 集萃智造 | 优傲机器人 | CGXi长广溪智造 | 阿童木机器人 | 极智嘉
服务与特种机器人企业
医疗机器人企业
元化智能 | 天智航 | 思哲睿智能医疗 | 精锋医疗 | 佗道医疗 | 真易达 | 术锐®机器人 | 罗森博特 | 磅客策 | 柏惠维康 | 迪视医疗 | 水木东方
人形机器人企业
优必选科技 | 宇树 | 云深处 | 星动纪元 | 伟景机器人 | 逐际动力 | 乐聚机器人 | 大象机器人 | 中科深谷 | 魔法原子 | 众擎机器人 | 帕西尼感知 | 赛博格机器人 | 数字华夏 | 理工华汇 | 傅利叶智能 | 天链机器人 | 开普勒人形机器人 | 灵宝CASBOT | 清宝机器人 | 浙江人形机器人创新中心 | 动易科技| 智身科技 | PNDbotics
具身智能企业
跨维智能 | 银河通用 | 千寻智能 | 灵心巧手 | 睿尔曼智能 | 微亿智造 | 推行科技 | 中科硅纪 | 枢途科技 | 灵巧智能 | 星尘智能 | 穹彻智能 | 方舟无限 | 科大讯飞 | 北京人形机器人创新中心| 国地共建人形机器人创新中心 | 擎朗智能 | 戴盟机器人 | 视比特机器人| 星海图 | 月泉仿生 | 零次方机器人
核心零部件企业
绿的谐波 | 因时机器人 | 坤维科技 | 脉塔智能 | 青瞳视觉 | 本末科技 | 鑫精诚传感器 | 蓝点触控 | BrainCo强脑科技 | 宇立仪器 | 极亚精机 | 思岚科技 | 神源生 | 非普导航科技 | 锐驰智光 | NOKOV度量科技 | 因克斯 | 褔德机器人 | 巨蟹智能驱动 | 微悍动力 | 凌云光 元客视界 | 璇玑动力| 意优科技| 瑞源精密 | 灵足时代 | Xynova曦诺未来 | HIT华威科
教育机器人企业
加入社群
欢迎加入【机器人大讲堂】读者讨论群, 共同探讨机器人相关领域话题,共享前沿科技及产业动态,添加微信“robospeak2018”入群!


看累了吗?戳一下“在看”支持我们吧










