近日,国际顶级期刊《Science Robotics》刊登了一篇令人瞩目的研究,详细记录了东南大学宋爱国教授领导的HANDSON团队在2024年Cybathlon全球辅助技术大赛中夺冠的技术细节。这标志着中国在辅助技术领域的研究首次获得如此高级别的国际学术认可。

该成果以“Arm prosthesis with dexterous control and sensory feedback delivers winning performance at Cybathlon”发表在《Science Robotics》上。
科学与技术的完美结合让47岁的徐敏——一位失去右上肢三十年的女性,在这场被称为“仿生学奥运会”的赛事中,以惊人表现击败了来自全球的顶尖团队,摘得手臂假肢项目桂冠。

▍从苏黎世到《Science Robotics》:一项改变残疾人生活的科技创新
Cybathlon由苏黎世联邦理工学院于2013年创立,旨在推动辅助技术的创新与发展。与传统体育赛事不同,Cybathlon聚焦于如何通过技术解决日常生活中的实际障碍。
参赛者需要完成一系列模拟日常生活的任务,如处理食物、开关门、使用工具等,这些都是截肢者日常生活中常遇到的挑战。

2024年10月,来自HANDSON团队的徐敏在苏黎世赛场上创造了历史。她不仅完成了所有任务,还是唯一成功完成最难题“触觉袋”任务的选手——需要仅凭假手从盲取袋中取出具有特定形状和柔顺性的物体。
从另一个角度来说,也许徐敏的故事本身就是一曲韧性的赞歌。1992年,年仅17岁的她在一次工伤事故中失去了右上肢。像大多数截肢者一样,她尝试使用传统假肢,但最终因不适感而放弃。

“1999年结婚时,我曾戴过装饰性假肢,但很快就放弃了。”徐敏在采访中回忆道。“三十年里,我已经习惯了用一只手生活。”
然而,当她了解到Cybathlon赛事后,内心深处的火苗被重新点燃。她没有肌电控制经验,截肢时间长,年龄也不占优势——但这些都没有阻挡她迎接挑战的决心。徐敏在不同行业工作经历中培养的热情和坚定性格,使她能够与技术团队无缝合作,共同向这个全球顶级赛事发起冲击。
▍技术突围,三大创新攻克数十年难题
东南大学宋爱国团队的研究始于2007年,一直专注于将先进的感觉和反馈系统集成到机器人手中。在《Science Robotics》的文章中,研究团队详细介绍了他们的三大技术创新。

三自由度手腕设计与双指夹持器
团队开发了一种全新的假手和腕部设计,融入三个自由度。不同于传统的五指设计,他们创新性地采用双指夹持器结构:近端指骨经过强化可用于抓取重物,远端指骨则专门用于精细操作。
腕部机构将主动旋转伺服系统与被动屈曲关节相结合,显著减少了在拧灯泡等任务中身体的代偿性运动。这种生物力学优化设计使得操作更加直观和高效。

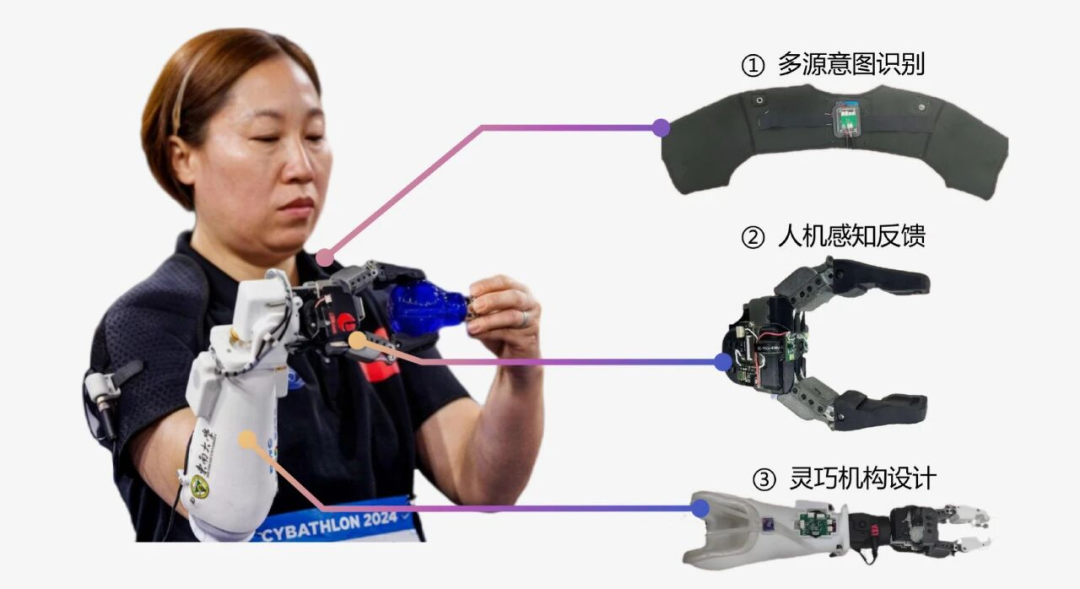
多源意图识别方法
针对徐敏残肢的具体情况,团队开发了一种体驱动/肌电混合控制界面。两个可拉伸织物传感器检测肩部运动实现手部驱动,双点肌电传感器则通过传统肌电控制方法驱动腕部旋转。
这种多源意图识别策略不仅提高了手部操控的可靠性,还实现了独立的腕部控制,使得在不同手臂姿势下进行精确操作成为可能。
机器视觉与多模态反馈系统
最独特的创新是机器视觉辅助感觉处理与多模态反馈的结合。团队在假手掌心集成了一枚单目摄像头,连接到嵌入在接收腔中的机器视觉识别模块。
这个系统能够实时识别物体的几何形状和材料特性,然后通过几种不同的模式反馈给用户。其中四个发光按钮呈菱形排列,这些按钮用于输入目标特征(形状和柔顺性),而它们的发光则指示引导信息(前、后、左、右)。电子蜂鸣器发出不同的抓取阶段信号,例如接近、接触和握持。
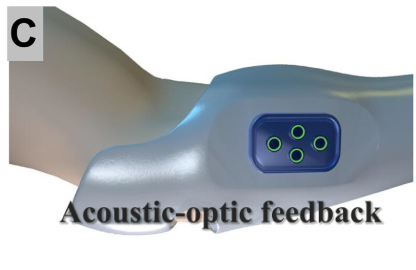
手掌中集成了一个单目摄像头,并连接到嵌入在插座中的片上机器视觉识别模块,从而能够实时识别物体的几何形状和材料特性(图1D)。这些组件共同构成了一个完整的多模态反馈系统,提高了物体定位和抓取精度,确保可靠地处理具有不同特征的物体。
▍失败与转折:从放弃到夺冠的心路历程
夺冠之路并非一帆风顺。在决赛前的挑战赛中,团队曾在一项需要强大抓握力和精准腕部控制的任务上遇到困难。经过数月测试,他们最终决定放弃该任务,认为没有队伍能够完成。
然而比赛当天,两支队伍成功完成了这个“不可能”的任务。“这一经历对于揭示我们设计与其他设计之间的技术差距至关重要。”团队在《Science Robotics》文章中坦言。
这一失败成为了转折点。团队开始与参加过2020年Cybathlon的中国团队Hands On合作,这次合作带来了决定性转变:用两指夹爪取代五指假肢手,提高了功能兼容性。同时,他们重新开发了传感与控制系统以优化性能。新组建的HANDSON团队带着新的决心,帮助徐敏克服每一个挑战。
2024年Cybathlon的决赛任务更加注重假肢手的综合性能:平衡精细和强大的抓握、增强手腕灵活性、提高双手协调性以及提供有效的感觉反馈。在最难的“触觉袋”任务中,徐敏需要仅凭假手从盲袋中取出具有特定形状和柔顺性的物体。这项任务需要综合运用视觉、听觉和触觉反馈,对假肢系统的感知和反馈能力是极大挑战。
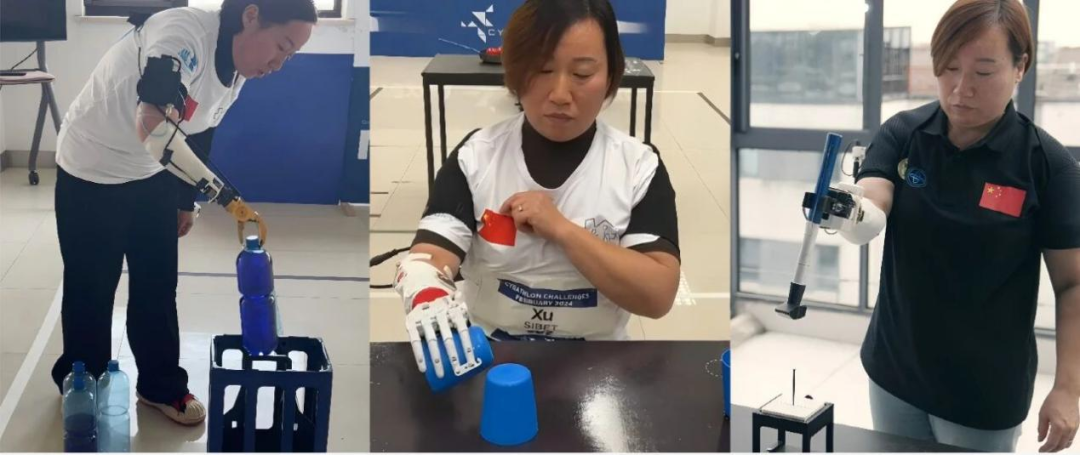
徐敏训练画面
尽管面临来自其他队伍的巨大压力,徐敏保持着非凡的镇定,以最少的错误完成了所有任务。当她冲过终点线时,这一刻验证了整个团队两年的准备工作。
▍为何这项研究能登上《Science Robotics》?
HANDSON团队的研究之所以能登上《Science Robotics》,不仅仅因为他们赢得了比赛,更因为他们的技术突破解决了辅助技术领域的多个关键科学问题。
首先,他们实现了感知与运动控制的闭环系统。将机器视觉集成到假肢中,为用户提供了前所未有的环境感知能力,这超越了传统的仅依靠肌电信号的控制方式。其次,多模态反馈方法创新性地解决了感觉缺失问题。通过视觉、听觉和触觉的多种反馈方式,用户能够获得更加丰富和直观的操作信息。

最重要的是,这项研究展示了如何将实验室技术转化为实际应用。Cybathlon作为一个测试平台,验证了辅助技术在真实环境中的性能,这对于推动技术从实验室走向日常生活具有重要意义。
HANDSON团队的愿景远不止于此。他们计划继续改进设计并扩展其在日常生活中的应用。
降低成本和提高可靠性是技术转化的关键挑战。目前的高端假肢价格昂贵,使得许多需要的人无法获得。团队希望通过优化设计和制造流程,让更多截肢者能够从这项技术中受益。
延长电池寿命和提高舒适度也是未来改进的重点。当前系统需要频繁充电,且长时间佩戴的舒适度仍有提升空间。团队未来还计划开发更加智能的控制算法,使假肢能够学习用户的习惯和偏好,提供更加个性化的辅助体验。
如需咨询企业合作事宜,欢迎联系机器人大讲堂-客服(19560423866,手机与微信同号)进行对接。
----------------END-------------------

工业机器人企业
埃斯顿自动化 | 埃夫特机器人 | 非夕科技 | 法奥机器人 | 越疆机器人 | 节卡机器人 | 松灵机器人 | 珞石机器人 | 盈连科技 | 集萃智造 | 优傲机器人 | CGXi长广溪智造 | 阿童木机器人 | 极智嘉
服务与特种机器人企业
医疗机器人企业
元化智能 | 天智航 | 思哲睿智能医疗 | 精锋医疗 | 佗道医疗 | 真易达 | 术锐®机器人 | 罗森博特 | 磅客策 | 柏惠维康 | 迪视医疗 | 水木东方
人形机器人企业
优必选科技 | 宇树 | 云深处 | 星动纪元 | 伟景机器人 | 逐际动力 | 乐聚机器人 | 大象机器人 | 中科深谷 | 魔法原子 | 众擎机器人 | 帕西尼感知 | 赛博格机器人 | 数字华夏 | 理工华汇 | 傅利叶智能 | 天链机器人 | 开普勒人形机器人 | 灵宝CASBOT | 清宝机器人 | 浙江人形机器人创新中心 | 动易科技 | 智身科技 | PNDbotics
具身智能企业
跨维智能 | 银河通用 | 千寻智能 | 灵心巧手 | 睿尔曼智能 | 微亿智造 | 推行科技 | 中科硅纪 | 枢途科技 | 灵巧智能 | 星尘智能 | 穹彻智能 | 方舟无限 | 科大讯飞 | 北京人形机器人创新中心| 国地共建人形机器人创新中心 | 擎朗智能 | 戴盟机器人| 视比特机器人| 星海图 | 月泉仿生 | 零次方机器人
核心零部件企业
绿的谐波 | 因时机器人 | 坤维科技 | 脉塔智能 | 青瞳视觉 | 本末科技 | 鑫精诚传感器 | 蓝点触控 | BrainCo强脑科技 | 宇立仪器 | 极亚精机 | 思岚科技 | 神源生 | 非普导航科技 | 锐驰智光 | NOKOV度量科技 | 因克斯 | 褔德机器人 | 巨蟹智能驱动 | 微悍动力 | 凌云光 元客视界 | 璇玑动力| 意优科技| 瑞源精密 | 灵足时代 | Xynova曦诺未来 | HIT华威科
教育机器人企业
加入社群
欢迎加入【机器人大讲堂】读者讨论群, 共同探讨机器人相关领域话题,共享前沿科技及产业动态,添加微信“robospeak2018”入群!


看累了吗?戳一下“在看”支持我们吧