准确而稳健的人体运动估计对于在日常活动中实现有效的肌电图 (EMG) 信号驱动的神经机器接口至关重要。负载引起的肌肉共同收缩水平变化的影响在很大程度上仍未得到解决,这常常导致性能下降。为了解决这些限制,上海交通大学的朱向阳团队提出了一种 EMG 驱动的状态空间模型来估计手部和腕部运动,而无需在不同负载条件下进行额外训练。相关成果已发表在《IEEE Transactions on Neural Systems and Rehabilitation》上。
01
研究背景
在应用肌电包络驱动肌肉模型(MMs)估计变负载条件下的连续运动时,存在两个关键问题。首先,现有基于肌肉模型的控制器将关节刚度视为恒定值,但事实上当主动肌与拮抗肌同时激活时关节刚度会增强。研究证实负载增加会加剧肌肉协同收缩程度,这意味着负载变化会引起肌肉与关节刚度的改变,而基于模型的控制器尚未充分考量这一特性。其次,由于采用的希尔式肌肉模型经过简化,其固有建模误差会降低运动估计精度。值得庆幸的是,控制论领域的研究表明,通过在状态空间模型中构建观测方程可有效补偿此类建模误差与不确定性。然而当前主流的希尔模型基肌肉模型仍采用"开环"结构,因此亟需建立能通过反馈修正模型估计误差的观测方程。
02
研究概述
本研究提出一种肌电驱动状态空间模型,在仅使用零负载训练数据的前提下,提升手-腕部肌肉模型在变负载条件下的鲁棒性与估计精度。该模型首次提出具有可变关节刚度与协同激活特性的肌肉模型作为状态模型,使其能适应增强的肌肉协同收缩;同时甄选出负载鲁棒性肌电特征作为状态空间模型的观测变量,并采用反向传播神经网络(BPNN)构建运动学变量(状态变量)与肌电特征间的映射关系作为观测函数。本研究主要贡献在于:1)提出基于可变刚度肌肉模型的状态空间运动估计新框架;2)在不增加训练负担的前提下,显著提升模型控制器对抗负载变化的鲁棒性与估计精度。为验证所提方法的有效性,我们开展了系列对比实验,包括与零负载特定负载条件下训练的传统肌电包络驱动肌肉模型等进行系统性对比分析。

图1. 试验设置。(图片来自原文)

图2. 模型融合方案。(图片来自原文)
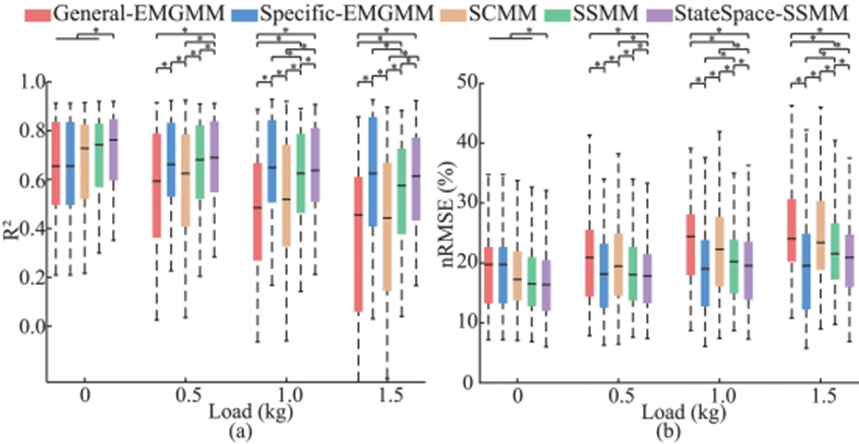
图3. 估计精度比较。(图片来自原文)
03
研究意义
本研究提出一种融合可变刚度肌肉模型的肌电驱动状态空间模型。在状态模型中,通过引入可变关节刚度与基于协同激活的肌肉动力学机制,使模型能够自适应负载变化引发的肌肉协同收缩水平改变。同时采用具有负载鲁棒性的肌电特征作为观测变量,借助卡尔曼滤波实现对状态模型估计误差的实时修正。实验结果表明,相较于传统肌电包络驱动肌肉模型,所提出的状态空间可变刚度模型显著提升了模型鲁棒性与运动估计精度。该方法为开发高可靠性肌电人机接口提供了新的技术路径。
参考文献:
Zhao J, Yu Y, Sheng X, et al. Towards Load-Robust Motion Estimation Using an EMG-Driven State-Space Model with a Variable Stiffness Musculoskeletal Model[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2025, 33:3171-3180.
来源:BME康复工程分会










