昆虫级爬行机器人以自然界昆虫为仿生对象,具备多足爬行能力,能适应复杂崎岖的地面。同时,因体积小巧、行动灵活,在地震、火灾后的废墟,管道内部等诸多领域,昆虫级爬行机器人都发挥着重要作用。随着应用需求的扩展,研究人员尝试通过增加驱动自由度以提升机器人在环境操控方面的能力,从而拓宽任务执行范围。然而,传统设计中每增加一个执行器往往伴随体积与重量的上升,限制了机器人的机动性与应用场景。
为应对这一挑战,部分研究转向可重构结构设计,采用锁定机构实现选择性关节锁定,从而在单个执行器驱动下实现多种运动构型,此类方法在降低系统质量与体积方面具有一定优势,但在结构上常依赖杠杆臂放大微小位移,导致系统复杂度提高。近年来,静电吸附技术被引入作为离合机制,利用高压电场下的介电材料粘附力实现紧凑型离合功能,这类设计虽在部分手部、臂部及足踝结构中取得进展,却面临层间错位、运动范围受限等问题。部分研究尝试通过分离转子和定子结构实现旋转离合,然而其实验样机尺寸与重量仍较大,难以集成于目标尺寸在30厘米以下的昆虫级机器人系统。离合器层在小型化过程中面临平面外位移迅速减小等技术瓶颈,制约了微型化发展。
▍提出mR-ES,破解昆虫级爬行机器人微型化瓶颈
针对上述问题,来自韩国首尔国立大学工程研究所SNU-IAMD机械工程系软体机器人研究中心生物机器人实验室的研究团队进行了深入研究,并于前不久开发出一款适用于昆虫级爬行机器人的微型旋转静电离合器(mR-ES)。
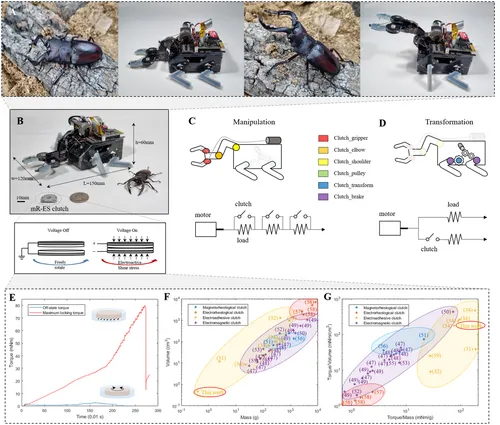
该离合器直径为20毫米,重量约为0.4克,主要用于调节电机功率,从而构建出高度可重构的微型机器人系统。其能够将单个电机的动力选择性地分配到多个关节,使昆虫级爬行机器人实现多种运动姿态与腿部结构重组。
实验表明,通过集成这种轻量级离合器,昆虫级爬行机器人可实现三自由度的双向操控与二自由度的结构重构。在仅使用一个电机、七个mR-ES离合器以及四对离合器层的配置下,昆虫级爬行机器人能够独立驱动六个额外关节,而不会显著增加整机尺寸或质量。相较于其他尺寸在30厘米以下的爬行机器人,该系统可管理更多附加自由度。
借助这些额外的驱动自由度,机器人能够调整夹持器的位置与方向,从而扩展其运动范围。这一设计使昆虫级机器人具备执行多种任务的能力,例如物体操控、越障以及形态变换。该方法为在微型机器人系统中嵌入多个驱动自由度提供了可行路径,有助于提升其整体机动性与功能多样性。
在实际测试中,研究团队展示了该机器人通过不同姿态与环境进行交互的能力,包括与其他机器人、物体及障碍物的互动。此外,该离合器还具备降低能耗的潜力,可通过选择性接合弹簧、采用不同齿轮比的电机以及调整结构刚度来实现。实验结果显示,将这些功能整合至采用mR-ES离合器的昆虫级机器人中,有助于增强其操作性能与适应性。
▍mR-ES的实现:直径20mm,厚1.5mm,重0.4g
mR-ES离合器直径20毫米,厚度1.5毫米,重量仅0.4克,采用多层薄片堆叠结构,由定子和转子组成。当施加电压时,柔性离合器层会发生平面外弯曲并相互啮合,从而实现动力传递;断电后,转子即可自由旋转。在420伏工作电压下,其锁定扭矩达到83.4毫牛·米,而功耗仅为2.94毫瓦。
在开发过程中,研究团队主要面临两个技术挑战。
首先是离合器层在低电场下的运动范围受限问题。随着尺寸缩小,离合器层的弯曲刚度显著增加,而层间间隙又需保持不变以确保性能。为此,团队创新性地在离合器层上引入了特定切割图案,使结构能够分段弯曲,成功将吸合电压从132伏降低到76.7伏。

其次是旋转过程中的导线缠绕问题。团队开发了一种基于织物清扫层的滑环结构,通过低抗弯刚度的导电织物实现稳定电荷传输,确保了转子在旋转过程中的电气连接可靠性。
在性能优化方面,研究团队通过系统分析切割图案的参数,实现了离合器性能的精细调控。
他们发现,非约束长度的增加和间隙的减小有助于降低吸合电压,而增大非约束长度和图案宽度则可提升锁定扭矩。

经过对各参数之间权衡关系的深入研究,团队最终选定了一组最优参数组合,使离合器在保持83.4毫牛·米锁定扭矩的同时,将释放时间控制在0.8秒以内,接合时间仅为30毫秒。
▍mR-ES的应用:嵌入机器人实现单个电机双向操控
为了验证mR-ES离合器的有效性,研究团队将其应用到了昆虫级爬行机器人。该机器人全长15厘米,重124克,采用智能复合微结构工艺制造,具备多关节独立控制与地形自适应能力。
研究团队将多个mR-ES离合器嵌入机器人的肩、肘及指关节中,通过选择性接合的方式,实现单个电机对多个自由度的独立控制。在机械臂系统中,离合器组与肌腱传动机构协同工作,完成夹持器的开合、手臂抬升与下降等双向动作。此外,团队在指关节中嵌入扁平扭转弹簧以提供被动拮抗运动,并引入专用接线模块,解决了滑轮多次旋转导致的电线缠绕问题。

基于上述设计,该机器人能够通过单个电机驱动实现3自由度的双向操控。机械臂可灵活调整夹持器的位置与方向,在较大工作空间内完成物体抓取等任务。集成于各关节的编码器用于实时估计手臂姿态,抓握力测试表明,夹持器在水平与垂直方向上均能稳定抓取与机器人自重相当的物体。
进一步地,研究团队还将mR-ES离合器应用于机器人的腿部调节系统中。通过控制腿部的旋前与旋后角度,机器人能够改变地面反作用力,从而适应不同地形条件下的爬行需求。实验结果显示,腿部在不同旋后角度下表现出各向异性的刚度特性,使其能够在光滑或复杂表面上实现稳定运动。

通过系统化集成mR-ES离合器,实现了昆虫级机器人在有限尺寸与重量约束下的高自由度运动与地形适应能力。
▍mR-ES的测试:多任务演示验证实际应用能力
利用集成mR-ES离合器的昆虫级爬行机器人,研究团队也进行了操作任务与地形自适应测试,展示了其在实际应用中执行任务的能力。
在操作任务方面,配备四自由度机械臂的机器人能够完成多种与环境交互的任务。通过精确控制末端执行器的位置与方向,机器人实现了搭乘无人机跨越障碍、为其他机器人更换电池,以及调整搭载摄像头视角等功能。
在搭乘无人机演示中,机器人通过抬起机械臂并抓取无人机支架,在离合器锁定状态下随无人机共同移动,扩展了其移动范围。电池更换任务则展示了机器人抓取不同高度物体的能力。通过安装在机械臂末端的摄像头,机器人能够根据臂部姿态变化获取更宽广的视野范围。

研究团队还利用离合滑轮机构拓展了机器人的功能。该机构使机器人能够对障碍物施加向下的推力,从而抬升前车身并实现越障。另一项演示中,机器人通过控制夹持器绕轴旋转,成功完成了阀门关闭操作。这些功能均通过离合滑轮对角牵引连接夹持器的肌腱而实现。
在地形适应测试中,机器人通过调整腿部旋后角度,在不同特性的表面上展现了差异化的运动性能。在坚硬地面上,旋前腿配置表现更优;而在柔软地面上,旋后腿的速度比旋前腿提升7.3%,旋前腿则下降40%;在湿滑的特氟龙表面上,旋后腿的速度较旋前腿快24%。实验表明,通过调节腿部旋后角度以匹配地形特性,机器人能够合理分配水平与垂直方向的作用力,从而在不同地面上保持稳定的爬行性能。
以上演示结果表明,基于mR-ES离合器的驱动与构型调节系统,能够有效增强昆虫级机器人在复杂环境中的操作能力与运动适应性。
▍关于未来
当然,配备mR-ES离合器的机器人在实际应用中仍存在一些局限性,其中耐久性是当前需要解决的主要问题。静电离合器层本身具有较长的使用寿命,但在承受过大外部扭矩时容易发生断裂。研究人员指出,未来可通过选用更优化的基材与介电材料组合来改善这一状况。
此外,嵌入式离合器中细导线与刚性导电环氧树脂粘合界面处的断线现象也时有发生。通过优化导线与粘合材料的刚度匹配,有望提升离合器对这类故障的抵抗能力。
在系统控制方面,该机器人尚未实现完全自主化。研究团队表示,未来的研究方向将包括为机器人配备带深度传感器的视觉系统,使其能够识别目标物体并实现自主接近与抓取。同时,在地形自适应方面,通过在可变形腿部嵌入应变传感器,机器人可实时感知地面刚度与摩擦特性,从而自动调整腿部至最优角度,增强在不同地形上的运动能力。
参考文章:
https://advanced.onlinelibrary.wiley.com/doi/10.1002/aisy.202500625










