点击下方卡片,关注「3D视觉工坊」公众号
选择星标,干货第一时间送达
3D视觉工坊很荣幸邀请到了西安电子科技大学苏悦,为大家着重分享他们团队的工作。如果您有相关工作需要分享,欢迎文末联系我们。
 DenSe Policy: Bidirectional Autoregressive Learning of Actions
DenSe Policy: Bidirectional Autoregressive Learning of Actions
主页:https://selen-suyue.github.io/DspNet/
论文: https://arxiv.org/pdf/2503.13217
直播信息
时间
2025年10月29日(周三)19:00
主题
ICCV 2025 | Dense Policy: 用双向自回归的模仿学习策略实现复杂场景和高动作约束的机器人操作
直播平台
3D视觉工坊视频号
点击按钮预约直播
3D视觉工坊哔哩哔哩也将同步直播
主讲嘉宾
 苏悦
苏悦
西安电子科技大学
西安电子科技大学的大四本科生,即将入学香港大学MMLab跟随刘希慧老师攻读博士学位。他曾在上海交通大学MVIG实验室跟随卢策吾教授与杨理欣教授进行模仿学习相关研究。他先后在字节跳动Seed与星尘智能实习,探索高效场景理解的VLA策略与可泛化的机器人全身移动操作策略。
个人主页:https://selen-suyue.github.io/
直播大纲
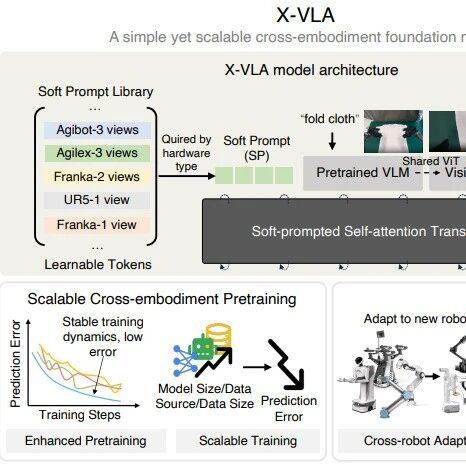
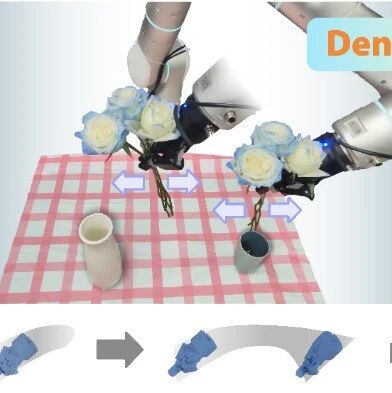
介绍现有生成式和自回归式模仿学习策略的特性 梳理复杂场景下动作生成误差的原因 介绍Dense Policy的方法,分析其特性 展示双向自回归轨迹特性,阐述Dense Head的优势 介绍全身移动操作作为复杂场景和高维动作任务的代表 分享Dense Policy用于复杂全身操作的方案和效果
参与方式
注:3D视觉工坊很荣幸邀请到了西安电子科技大学苏悦,为大家着重分享他们团队的工作。如果您有相关工作需要分享,
欢迎联系微信:cv3d009,请备注:宣传工作,则不予通过。




![2025年全球及中国智能焊接机器人行业发展历程、产业链、市场现状及趋势研判:行业仍处于初期阶段,渗透率将不断提升[图]](https://xtechcon-static.oss-cn-chengdu.aliyuncs.com/xtimes/xtimes/images/2025-10-30/6902b9097bdb9.jpeg)