来源:Green生态智能机器人
前言
主动重建技术允许机器人自主探索场景,实现全覆盖并减轻人工数据采集的负担。然而,现有的方法受到复杂场景表示的限制,特别是在大规模环境中。隐式神经表示,特别是神经辐射场(NeRF),由于其能够捕捉复杂细节并优化存储,为大规模场景的高保真重建提供了显著优势。
本文提出了一种基于隐式神经表示的大规模主动重建框架。该框架增强了 NeRF 以识别低质量区域,并执行在线质量评估以指导高效探索。同时,设计了一种包含平滑飞行轨迹的主动重建策略,以提高重建质量和完整性。通过选择灵活性高的四旋翼飞行器平台,在仿真环境中验证了该方法的有效性。
图1:仿真环境概览
展示了 Gazebo 中的仿真环境(OSRF First Office)及其对应的无人机模型表示。
系统概览
本文提出了一种基于隐式神经表示的大规模主动测绘框架,利用 RGB-D 相机实现自主高效飞行。无人机通过机载相机传感器收集单帧深度和彩色图像数据,然后通过 SLAM 模块注册到全局点云地图中。
SLAM 结果用于生成 3D 占据栅格地图,该地图用于前沿点(Frontier)检测。在生成候选视点后,处理每个视点的深度和彩色图像数据以进行建图过程,从而获得每个视点的质量评估指标 。这与每个视点的可见前沿 结合以计算增益。选择完全覆盖未观测区域的最短路径,并生成平滑的飞行轨迹。最后,无人机的飞行控制器用于执行飞行任务。
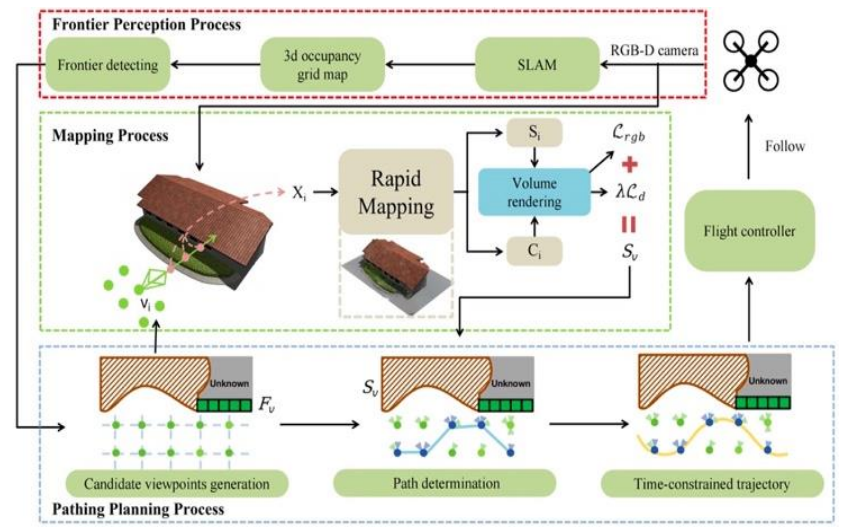
图2:基于隐式神经表示的主动测绘框架概览
流程图展示了从传感器数据输入到 SLAM、3D 占据栅格图构建、快速建图(Rapid Mapping)、候选视点生成、路径确定以及最终轨迹生成的完整闭环。
核心方法论
隐式神经表示
为了实现实时、高保真和高度完整的建图,隐式神经表示框架类似于 Rapid-Mapping。该建图算法允许 RGB-D 或 LiDAR-RGB 输入,并采用多分辨率哈希编码。这种方法在训练期间有效地利用环境表示进行计算,同时减少了 MLP 解码器中的层数。具体来说,输入空间中的任意点 ,经过处理后将产生对应的几何 SDF 值 及其 RGB 颜色表示 。
为了使用 SDF 执行渲染,我们将 SDF 转换为密度:
其中 是控制表面边界锐度的可学习参数。然后使用体积密度渲染每条光线的颜色和深度:
建图过程以自监督方式进行训练,应用了自由空间损失 () 和 SDF 损失 ()。此外,还应用了渲染损失函数,包括 RGB 损失 () 和深度损失 ():
质量评估
质量评估旨在识别重建中纹理和几何精度较差的区域。对于主动建图,弱纹理区域的质量可以通过增加多视角覆盖来改善。为了准确反映地图质量并协助选择下一个最佳视点,作者提出了一种基于新视角合成的质量评估方法。
具体而言,对于任何视点 ,将生成一个虚拟相机。对于空间中的任意输入 ,我们可以将此点投影到虚拟相机上以获得新视角合成的真实值:
其中 和 是对应像素点的位置, 是相机的内参, 是视点的位姿。通过结合投影结果和渲染损失,可以获得质量评估指标 。
完整性评估与增益计算
为了支持场景的全覆盖,引入了针对候选视点的完整性评估。由于现有的 NeRF 方法仅保留有关占据体积的信息,作者维护了一个 3D 占据栅格地图来表示未观测体积,并将其与 NeRF 地图损失集成到视点选择过程中。
最终,每个视点的信息增益计算如下:
其中 代表视点的信息增益, 和 分别代表从视点观察到的 NeRF 地图损失和前沿点。 和 是权重系数。
探索路径规划
探索路径规划旨在生成一条便于高效决策的观测路径。
-
候选视点生成:在局部规划范围 内,覆盖前沿和 NeRF 地图损失(FALs)。均匀采样候选点,并独立优化每个点的偏航角(yaw)以最大化传感器覆盖。 -
路径确定:确定一条穿过候选视点子集的路径,最小化路径长度同时确保全覆盖。该过程涉及计算可访问的 FALs 总数,选择 Top-z 候选视点,并使用 Lin-Kernighan 启发式算法求解旅行商问题(TSP)变体,以确定最短路径 。
实验结果与讨论
为了验证所提方法的性能,作者在具有光照条件的仿真场景中进行了实验。
计算效率
表1:各组件平均计算时间

表1展示了质量评估、路径规划和轨迹生成各环节的平均计算时间(单位:毫秒)。结果表明系统具有较高的实时性,总耗时仅约 46ms。
探索性能
表2:仿真场景中不同方法的探索统计
表2对比了 FUEL、Ours w/o N(消融实验,无质量评估)和 Ours(完整方法)在 OSRF 办公室场景下的总探索时间、总移动距离和平均覆盖率。结果显示,完整方法在探索时间和覆盖率上均优于对比方法。覆盖率计算公式为:
可视化结果

图3:不同方法的最终建图结果
图中展示了 FUEL、Ours w/o N 和 Ours 三种方法的最终建图效果。其中 A 代表点云地图,B 代表网格(Mesh)模型。可以看出本文提出的方法生成的地图更加完整,细节更丰富。
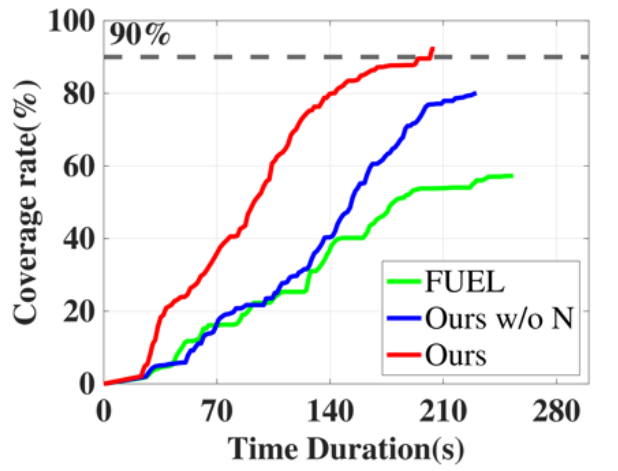
图4:覆盖率随时间变化的趋势图
折线图展示了不同方法随时间推移的覆盖率变化。红线(Ours)上升最快且最终达到的覆盖率最高,证明了该方法在效率和完整性上的优势。
总结
本文提出了一种基于新兴隐式神经表示技术的主动测绘系统。为了实现对建图结果的实时评估并为测绘策略提供反馈,设计了基于 NeRF 的质量评估方法和使用 3D 占据栅格地图的完整性评估方法。此外,提出了一种路径规划方法,选择一系列最佳视点以增强重建过程。为了确保无人机飞行的安全和效率,生成了具有时间约束的平滑轨迹。仿真实验验证了该方法在探索效率和地图质量方面的优越性。
文章地址:https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=10928742
敬请期待我们的下一篇文章!欢迎加入我们关于SLAM&大模型&Agent&具身智能学术交流群。
本文仅做学术分享,如有侵权,请联系删文。










