点击下方卡片,关注「3D视觉工坊」公众号
选择星标,干货第一时间送达
作者供稿直发 | 编辑:3D视觉工坊
星球内有20多门3D视觉系统课程、3DGS独家系列视频教程、顶会论文最新解读、海量3D视觉行业源码、项目承接、求职招聘等。想要入门3D视觉、做项目、搞科研,欢迎加入!
1. 论文信息
标题:ObjSplat: Geometry-Aware Gaussian Surfels for Active Object Reconstruction
作者:Yuetao Li, Zhizhou Jia, Yu Zhang, Qun Hao, Shaohui Zhang
单位:北京理工大学
项目主页:https://li-yuetao.github.io/ObjSplat-page/
代码链接:https://github.com/Li-Yuetao/ObjSplat
arXiv链接:https://arxiv.org/abs/2601.06997
IEEE T-ASE期刊链接:https://ieeexplore.ieee.org/document/11552769
2. 导读
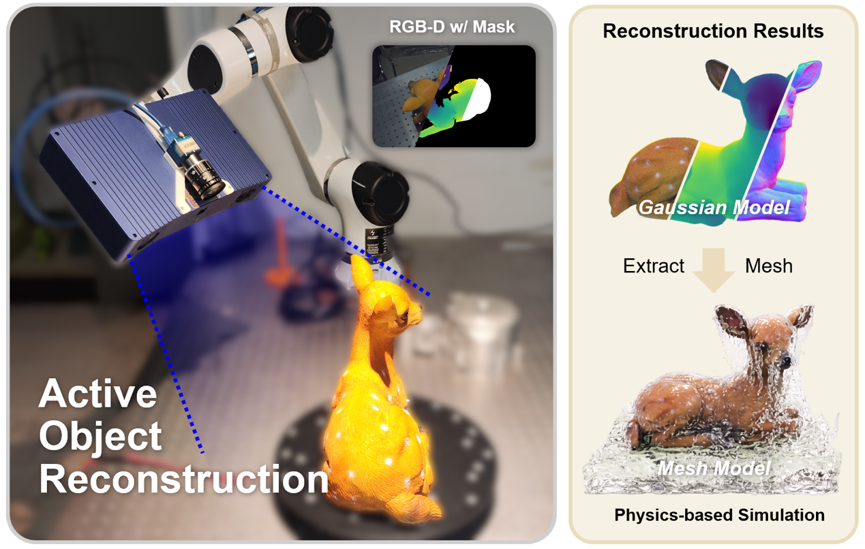
近日,北京理工大学团队在主动物体高保真重建方向的最新工作ObjSplat被IEEE Transactions on Automation Science and Engineering (T-ASE) 2026接收,论文、项目主页与代码已公开。ObjSplat提出了一种面向未知物体的自主高保真重建系统。该系统利用2D 高斯面元(Gaussian Surfels)作为统一表征,通过机器人自主规划扫描路径,实现对未知物体几何结构与外观纹理的高效、完整重建。针对传统方法在处理复杂几何结构(如镂空、自遮挡、薄结构)时难以准确识别欠重建区域,以及固定式扫描观测不完整、贪心式规划路径冗余等问题,ObjSplat引入了几何感知视点评估和下一最佳路径规划(Next-Best-Path, NBP)策略。该系统能够在数分钟内生成具有物理一致性的高质量三维模型,为数字孪生、文化遗产保护以及机器人仿真到现实(Sim-to-Real)迁移等任务提供关键技术支撑。
3. 效果展示
ObjSplat部署于机械臂+转台平台,针对真实世界中具有复杂几何拓扑和精细纹理的文物复刻品实现了全自主高保真重建,例如具有复杂结构的“妇好鸮尊”,以及纹理细节丰富的“唐三彩战马”和“梅花鹿”等。。
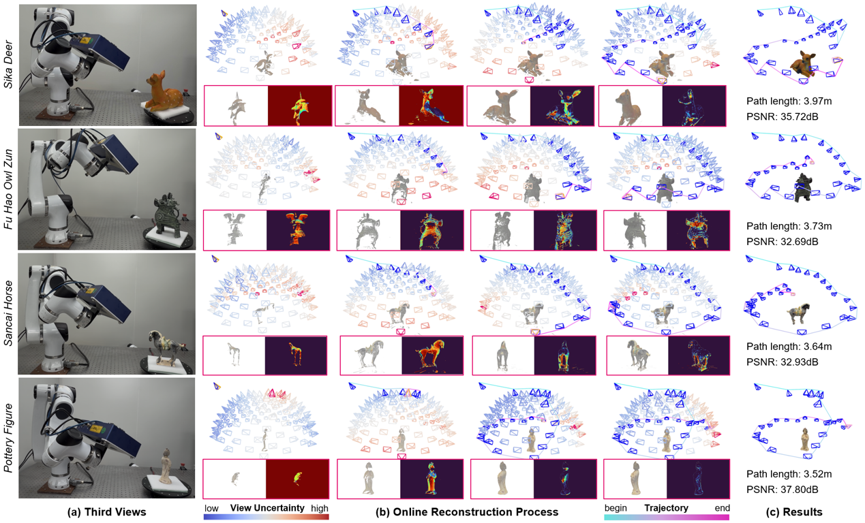

相比于现有的贪心策略(如FisherRF、GauSS-MI)常常导致杂乱无章、长距离的无效往复运动,ObjSplat 能够生成更加平滑、连续、包裹式的扫描轨迹,在较低移动成本下获得更完整的表面覆盖、更清晰的纹理细节,并有效减少稀疏视角重建中常见的漂浮伪影。
4. 引言
高质量三维物体数字化是机器人、计算机视觉和计算机图形学中的重要问题。对于扩展现实、数字文物保护、数字孪生和机器人仿真训练等应用而言,一个理想的三维资产不仅需要具有准确的几何形状,还需要具备逼真的外观纹理和可用于物理交互的显式表面结构。
近年来,NeRF 和 3D Gaussian Splatting 等可微渲染方法显著提升了三维重建与新视角合成的视觉质量。然而,这类方法通常依赖密集、多视角、离线采集的数据,并需要较多人工干预,限制了其在物体级数字资产规模化创建中的应用。在真实机器人系统中,传感器视场有限、物体形状未知,复杂结构容易产生自遮挡。固定扫描轨迹往往难以覆盖关键区域,逐视角贪心规划容易带来冗余运动和较长扫描路径,而一次性全局规划方法又依赖较准确的几何先验,在面对分布外(out-of-distribution, OOD)未知物体时性能容易下降。
为此,ObjSplat 旨在构建一个“感知—规划—重建”深度耦合的闭环系统,将高保真物体重建、几何感知的视角评估与多步前瞻的下一最佳路径规划紧密结合,在重建质量与探索效率之间取得更优平衡。
5. 主要贡献
几何感知的视角评估:通过显式建模背面可见性和遮挡感知的多视角共视关系,ObjSplat 能够更准确地量化非封闭曲面的重建质量和完整性,为解决镂空、薄壁、自遮挡等复杂几何问题提供可靠的感知引导。
基于多步前瞻的次优路径规划 (NBP) :ObjSplat 在动态构建的空间拓扑图上执行多步前瞻,联合优化信息增益和移动成本,生成更加高效、平滑的扫描轨迹。与传统贪心 NBV 方法相比,该策略显著减少了在线扫描时间和冗余运动。
统一的主动重建框架:ObjSplat 使用 2D Gaussian Surfels 作为统一表示,并利用表面法线指导高斯面元的增量更新与几何—纹理联合优化。“感知—规划—重建”的紧密耦合使系统能够高效、自主地生成具有物理一致性的高保真数字资产。
充分的仿真与真实实验验证:在 GSO 数据集上的 16 个不同几何和纹理复杂度物体,以及真实文物/工艺品重建任务中,均表现出良好的重建质量、表面完整性和扫描效率。实验表明,该方法能够在数分钟内生成兼具高保真外观和准确几何的三维数字资产。
6. 方法
ObjSplat是一个闭环主动重建系统,整体由三个核心部分组成:基于高斯面元的在线重建、几何感知视角评估和下一最佳路径规划。
首先,系统使用2D Gaussian Surfels对物体表面进行建模。每个surfel可以看作一个具有位置、尺度、方向、透明度和颜色属性的局部表面片元。通过结合深度、法线和光度损失的几何—纹理联合优化,ObjSplat能够有效抑制稀疏视角下的漂浮伪影和几何漂移问题。在模型更新过程中,ObjSplat会判断哪些区域仍然欠重建,并在这些区域选择性地添加新的Gaussian Surfels。系统综合考虑低不透明度区域、颜色误差区域、深度几何偏差区域以及背向表面区域,使新增面元更集中于真正缺失或质量较差的地方,而不是盲目增加冗余基元。
在视点评估方面,ObjSplat提出几何感知不确定性图。该不确定性图由 面元置信度(Surfel-wise confidence)、背面观测检测(Back-face detection)和遮挡感知的可见性(Occlusion-aware visibility)共同构成。通过可微渲染技术,系统可以从候选视角实时预测当前模型在该视角下的重建质量,并判断该视角是否能够带来有效的新观测信息。
在路径规划方面,ObjSplat不再简单地选择单个信息量最大的视角,而是构建候选视角之间的空间拓扑图,将主动扫描过程建模为兼顾信息收益和运动成本的路径搜索问题。机器人沿着规划出的Next-Best-Path依次执行多个视角采集,到达子目标后再重新评估全局不确定性并进行下一轮规划。该策略既保持了主动重建的自适应能力,又避免了贪心NBV在远距离视角之间反复跳转的问题。

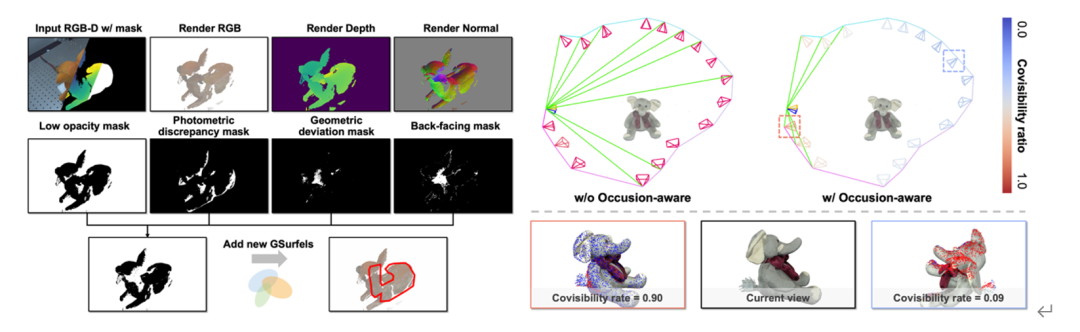
准确识别重建不足或未覆盖的区域:选择性地向不透明度不足、光度差异显著、几何偏差或背向表面的区域添加新的高斯表面。共视视角对比:传统基于视锥匹配的方法(左)难以处理物体自遮挡,容易误判共视关系;ObjSplat采用基于渲染的检测方式(右),可显式识别遮挡和背向表面,从而更准确地筛选有效共视点,保证几何约束和置信度更新的可靠性。
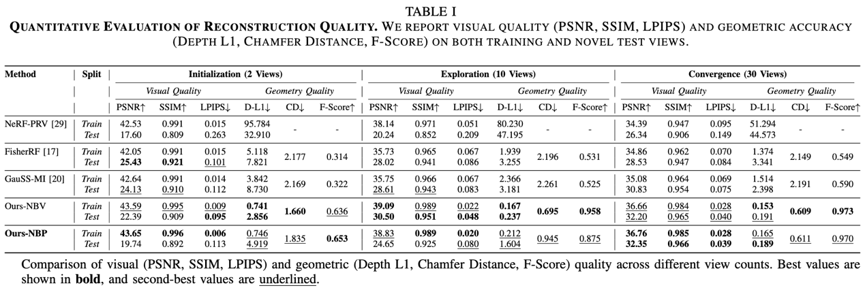
7. 实验结果
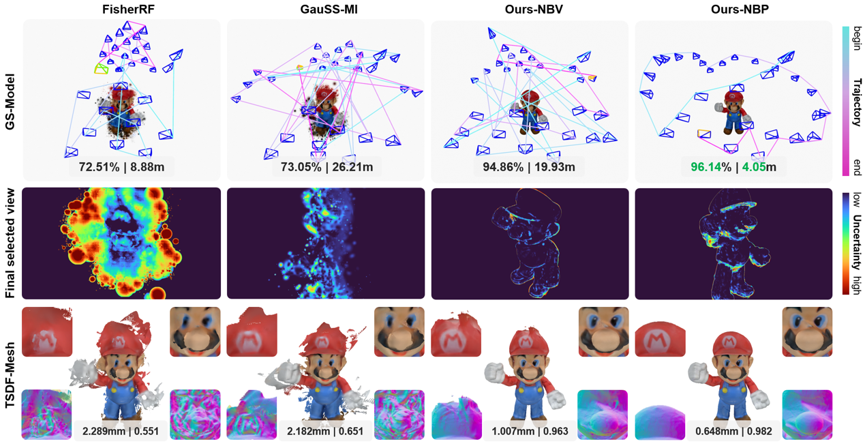
在与 FisherRF, GauSS-MI, NeRF-PRV 等前沿方法的对比实验中,ObjSplat展现出更优的重建质量与扫描效率:
路径效率:NBP 策略相较于贪婪式 NBV 缩短了约78%的运动轨迹(从18.02m降至3.96m)。 几何精度:Chamfer Distance降低至0.61mm左右,显著优于基准方法。 运行时间:全流程在线扫描重建+离线优化通常可在5分钟内完成。
实验结果表明,ObjSplat不仅能够在较短路径下实现高覆盖率扫描,还能生成具有清晰纹理、准确几何和较少漂浮伪影的高质量三维模型。


8. 总结
本文提出了ObjSplat,一个统一的主动物体重建框架,旨在兼顾高保真数字化与高效机器人自主探索。该方法以 2D Gaussian Surfels 作为统一表示,将增量式模型更新与几何感知视角规划紧密结合。通过显式建模背面可见性和多视角共视关系,ObjSplat能够超越简单的透明度线索,更可靠地定位欠重建区域并进行针对性补全。为克服传统贪心策略的短视问题,系统进一步提出 Next-Best-Path 规划方法,在动态空间拓扑上进行多步前瞻,同时权衡信息增益与运动代价。大量仿真和真实实验表明,ObjSplat在重建质量和扫描效率上均优于现有方法,能够以更短的自主扫描时间生成具有真实外观和水密几何结构的高质量三维数字资产。
尽管ObjSplat已取得良好效果,目前系统仍主要面向单个、静态、刚性物体的重建。对于剧烈光照变化、透明材质和高反光表面等复杂光学属性,现有渲染模型仍存在一定局限。未来的研究还将向更加复杂的真实世界场景迈进:包括处理具有复杂光学特性(如高反光、透明)的材质估计、动态物体的自主扫描捕捉,以及多机器人协同重建等前沿方向。
本文仅做学术分享,如有侵权,请联系删文。
。


添加微信:cv3d001,备注:姓名+方向+单位,邀请入群。


![[开源硬件]用于构建、分析和破解 USB 设备的多功能协议分析仪-Cynthion](https://xtechcon-static.oss-cn-chengdu.aliyuncs.com/xtimes/xtimes/images/2026-06-14/6a2e5def59b7e.jpeg)







