前言

近日,清华大学海洋软体机器人与智能传感实验室副教授曲钧天团队在磁驱动微型软体机器人领域取得新进展。团队开发的基于电磁线圈阵列可编程操控平台,让磁性机器人能够像“液滴”一样灵活移动。
磁驱动微型软体机器人具备可编程变形能力和多模态运动特性,能在复杂环境中灵活执行各类操作任务。然而,现有基于弹性软体材料的机器人自主变形能力有限,难以在狭窄缝隙中自由导航。
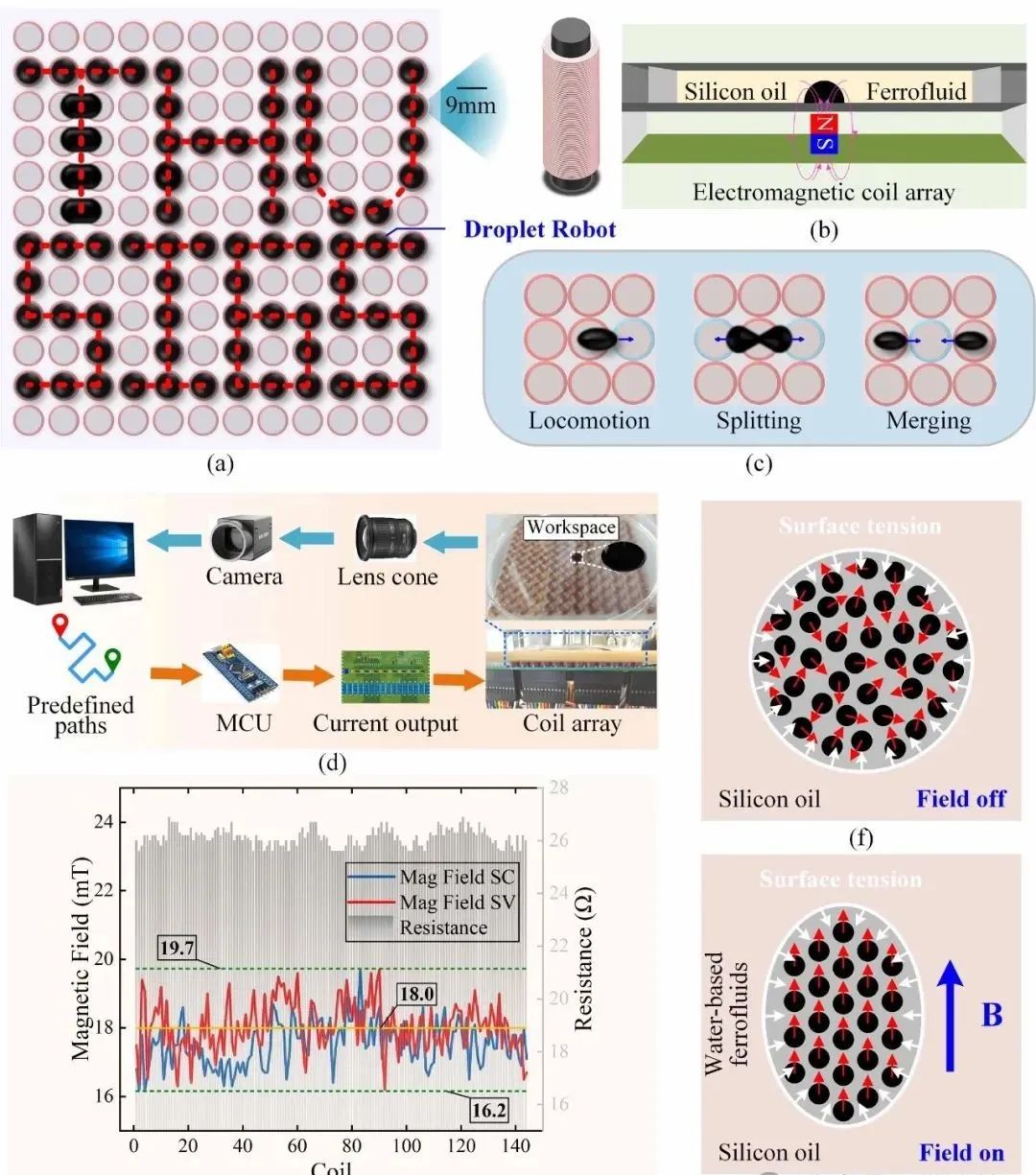
“围绕机器人在大规模、独立与可编程操控方面的关键技术难题,我们首先构建了一种高密度分布式电磁线圈阵列,在毫米尺度上实现机器人的可编程操控。”曲钧天介绍,平台集成了144个小尺寸电磁线圈,能在113毫米见方的工作空间内生成多个局部磁场,实现多点独立驱动。
通过调节相邻线圈电流的方向与幅值,平台就能诱导机器人发生可逆分裂与合并。当两个线圈施加方向相反的电流时,可驱动“液滴”产生拉伸形变;进一步调节磁场强度比,还能精确控制分裂后的“液滴”体积比。
实验证明,机器人在复杂任务场景下具备高效协同能力,包括自主排序、图案重构、数字显示、摩斯编码和流体混合等功能。曲钧天表示,该成果为海洋微流控、器官芯片、生物医学工程等领域提供了一种全新的微尺度智能操作范式,有望拓展磁驱动微型软体机器人在复杂环境中的应用边界。






免责声明
文章来源:千龙网
凡资讯来源注明为其他媒体来源的信息,均为转载自其他媒体,并不代表本网赞同其观点,也不代表本网对其真实性负责,转载请联系原出处。您若对该文章内容有任何疑问或质疑,请立即与后台小编联系,平台将迅速给您回应并做处理。注明本公司原创内容,转载与商务合作请联系慕老师159 0176 7989(微信同号)。