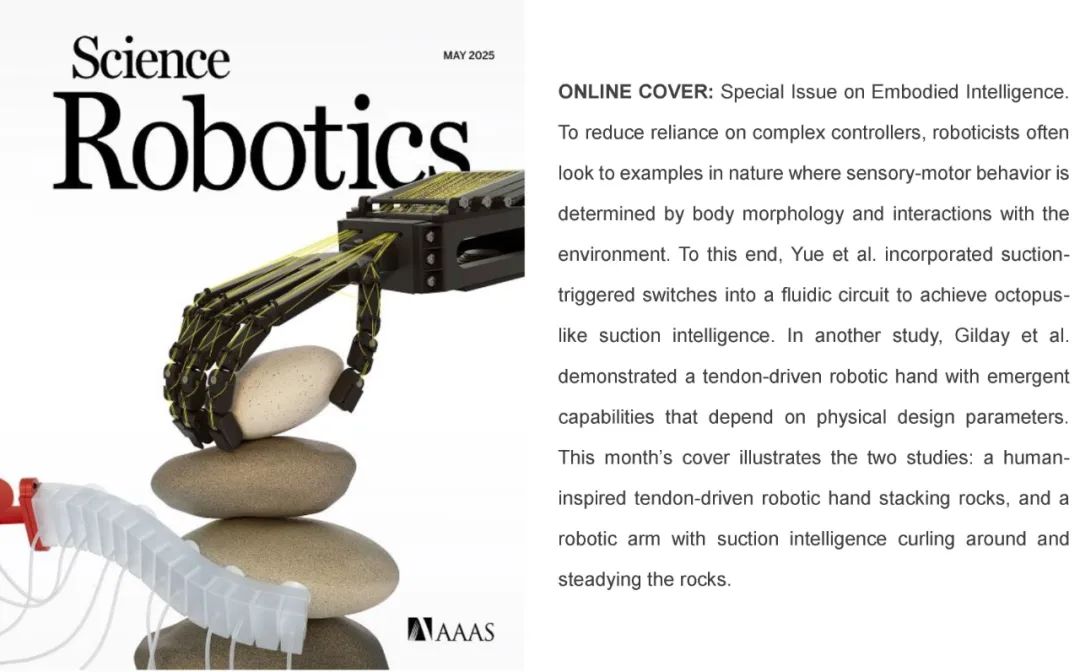
章鱼通过融合富含感觉神经元的吸盘、触手内的具身计算以及集中式的高阶推理,使其多层级神经肌肉系统可高效地实现复杂灵活的躯体操控。近日,来自英国布里斯托大学理工学院(University of Bristol’s Faculty of Science and Engineering)的研究团队受章鱼神经系统启发,开发出了一款结构简单且高度智能的仿章鱼软体机器人。该机器人仅通过单一吸附系统(suction system),既能够抓取易碎物品,又能够感知接触介质的类型(包括空气、水和粗糙表面),甚至能预测外部某一物体对其施加的拉力大小——所有这些都一气呵成,而无需中央处理器。相关研究成果于2025年5月14日以封面文章发表于Science Robotics上。
论文第一作者Tianqi Yue表示,该团队于去年开发出一款人工吸盘,利用柔性材料和水密封技术来模拟章鱼附着于岩石上。在此基础上,团队从单纯模拟章鱼吸盘的吸附行为,发展到“具身吸附智能”(embodied suction intelligence),即在软体机器人系统中模拟章鱼神经肌肉结构的关键特性。
吸附智能(suction intelligence)系统为双层工作机制:
底层仿生智能:通过将吸附流动与局部流体回路耦合,软体机器人可实现类似章鱼的基本躯体智能,包括轻柔抓握易碎物品、自适应弯曲,以及包裹未知几何形状的物体。
高层感知决策:通过解码吸盘的压力反馈信号,软体机器人能实现接触检测、环境介质分类、表面粗糙度识别以及交互拉力预测等高级感知功能。

这种结构简单、成本低廉的吸附智能系统有望催生新一代更安全、更智能且节能高效的软体机器人。其潜在应用包括:农业中的水果采摘、工厂中的易碎品处理、医疗器械在人体中的锚定,以及可与人类安全交互的软体玩具和可穿戴设备的开发。
该研究团队目前正致力于优化该系统,使其结构更紧凑、性能更稳定,以满足实际应用需求。下一步计划将智能材料与AI技术相融合,从而提升其在复杂环境中的自适应能力和智能决策水平。
Tianqi表示,“令人惊叹的是,这种无任何内置电子元件的简单吸盘,竟能像章鱼触手一样感知、思考并作出反应。该项技术有望让机器人变得更自然、更柔软,使用起来也更符合人类直觉。”
https://www.science.org/doi/10.1126/scirobotics.adr4264
Yue TQ; Lu CH; Tang KL, et al. Embodying soft robots with octopus-inspired hierarchical suction intelligence[J]. Science Robotics, 2025, 10(102). DOI: 10.1126/scirobotics.adr4264.
https://www.bristol.ac.uk/news/2025/may/octopus-robot-.html
版权声明:本文来源内部整理,仅供交流学习使用,欢迎转载,请联系授权!

END