点击下方卡片,关注「3D视觉工坊」公众号
选择星标,干货第一时间送达
来源:3D视觉工坊
「3D视觉从入门到精通」知识星球(点开有惊喜) !星球内新增20多门3D视觉系统课程、入门环境配置教程、多场顶会直播、顶会论文最新解读、3D视觉算法源码、求职招聘等。想要入门3D视觉、做项目、搞科研,欢迎扫码加入!

论文信息
标题:Real-Time Submap Trimming-Based Map Updating for Long-Term Localization of Mobile Robot in Dynamic Environments
作者:李腾飞,李帅永
机构:重庆邮电大学自动化学院
原文链接:DOI: 10.1109/TII.2024.3413958
论文概述
有效地图更新对保持移动机器人长期定位的准确性至关重要。然而,现有研究在动态环境中实时更新全局地图时面临诸多挑战,容易陷入冗余信息泛滥的困境,导致信息爆炸。为解决这些问题,该论文提出了一种基于实时子图剪裁的地图更新方法。通过筛选并剪裁冗余子图从全局地图中移除,确保地图始终保持最新状态,避免信息爆炸,最终提升长期定位精度。最后,为验证该方法的有效性,该论文在嵌入式系统(ARM Cortex-A53)低算力移动机器人上进行了室内场景超过一万平方米的长期定位实验。实验结果表明,该方法显著提升了移动机器人在地图更新过程中的实时性能,同时确保了长期定位精度。
主要贡献
论文方法
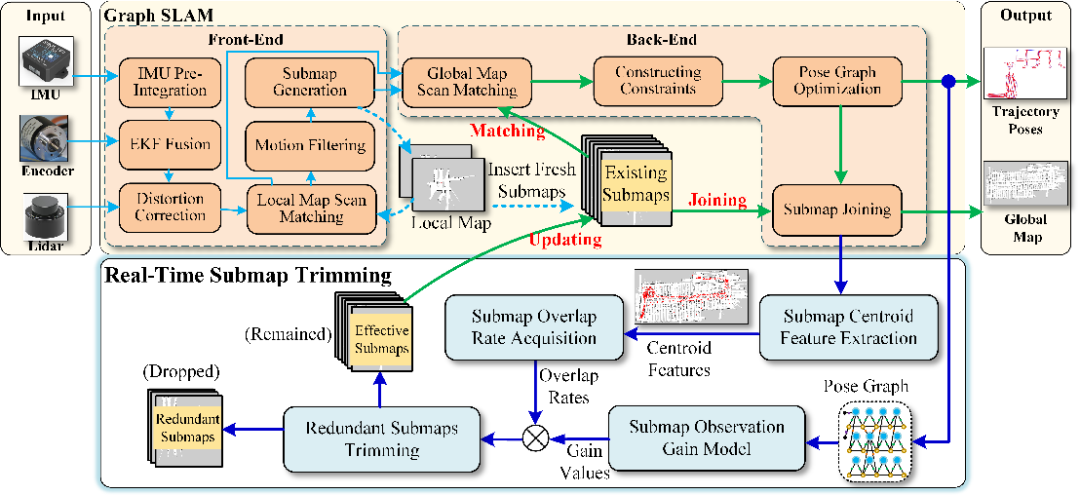
图 1 基于实时子图剪裁的地图更新方法系统框架
基于实时子图剪裁的核心思想在于:在多阶段图优化SLAM中,由于传感器不断观测最新的环境特征,新鲜子图不断生成,如果不断地剪裁旧的子图,就可以使得地图始终保持最新的状态。因此,在多阶段图优化SLAM中,地图更新的本质就是子图剪裁。如何进行地图更新的问题在多阶段图优化SLAM中可以转化为如何进行子图剪裁。推荐课程:机械臂6D位姿估计抓取从入门到精通。
方法流程:该方法首先通过实时分析子图质心特征,初步筛选出重叠率高的冗余子图,并结合观测增益模型评估子图的有效性,从而剔除那些长期存在的无效子图。其次,将过滤后的冗余子图从全局地图中移除,确保地图始终保持在线更新状态,避免信息爆炸,最终提升长期定位精度。
实验结果
在高仙机器人lifelong数据集上,与Cartographer、SLAMToolBox方法进行对比,结果表明地图更新实时性相较两者提升近200倍,长期定位精度提升70%左右。得益于地图更新实时性方面的极大提升,该方法可轻松应用于低算力嵌入式系统中。

图3高仙机器人lifelong数据集
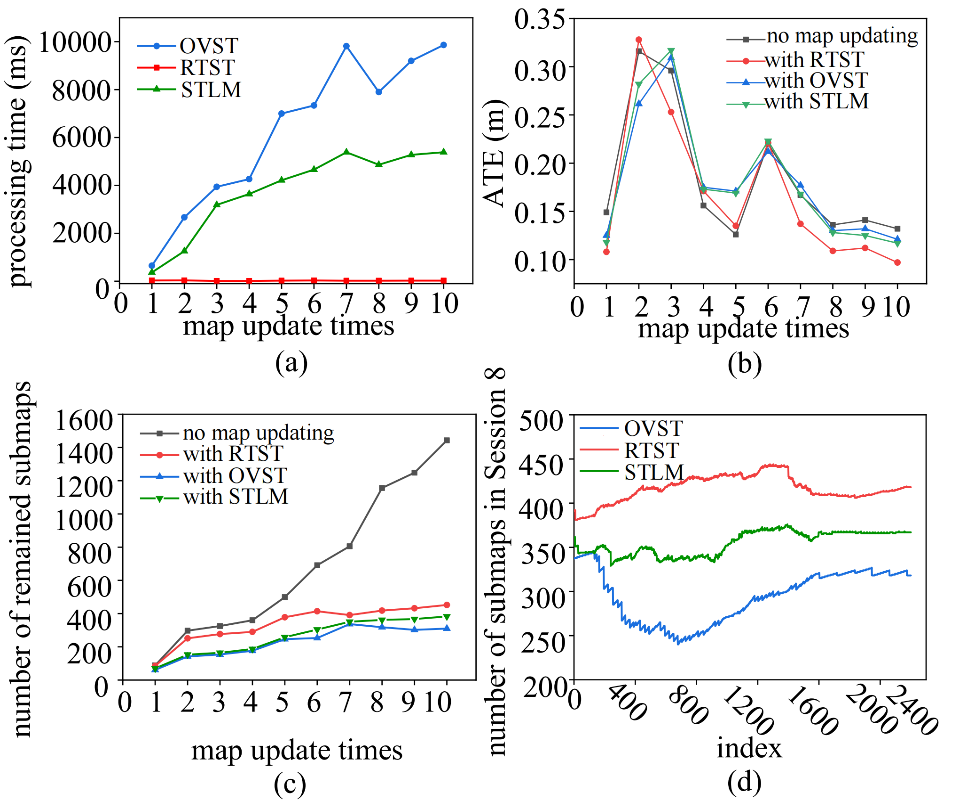
图4 仿真结果
为验证所提方法在计算资源有限的移动机器人上实时性与长期定位精度,搭建了如图5的实验装置。该实验用移动机器人搭载了嵌入式计算机(旭日派X3),其核心配置包括:主频1.7 GHz的ARM Cortex-A53处理器、单线激光雷达(RSLIDAR N10)、惯性测量单元(MPU6050)以及四个编码器。此外,计算机通过Wi-Fi与移动机器人保持通信,可实时显示全局地图状态。

图5 实验设备和实验场景
实验场景包含停车场和学生实验室。学生实验室中各类动态物体与人流的杂乱分布给地图更新方法带来挑战。此外,停车场内物体位置通常每日变化,且环境规模常超过1万平方米。车辆占用的广阔区域可能引发环境结构变化,这使其成为验证所提方法在大规模环境中实时地图更新能力和长期定位精度的理想场所。地图更新效果如图6、图7所示。

图 6 一万平米左右的停车场实时地图更新效果
 图7 高度动态环境的学生实验室
图7 高度动态环境的学生实验室
总结与未来工作
该论文提出了一种适用于动态环境中移动机器人长期定位的实时图更新方法,该方法天然具备抗信息爆炸能力。首先,子地图质心特征提取方法的重叠率显著提升了实时地图更新效率并降低了计算复杂度。此外,观测增益模型能有效识别长期存活但失效的子地图,确保长期定位精度。基于此,该论文实现了一种新型的子地图剪裁算法。仿真结果表明,该方法具有优异的实时性能和定位精度。真实场景实验表明本方法仅需依赖移动机器人的传感器和有限计算资源即可完成长期定位任务,无需增加新环境设备,具有一定的应用价值。未来我们将继续探索将该方法扩展至三维场景的建图定位任务。
3D视觉硬件,官网:www.3dcver.com

3D视觉学习圈子
「3D视觉从入门到精通」知识星球(点开有惊喜) !星球内新增20多门3D视觉系统课程、入门环境配置教程、多场顶会直播、顶会论文最新解读、3D视觉算法源码、求职招聘等。想要入门3D视觉、做项目、搞科研,欢迎扫码加入!

3D视觉全栈学习课程:www.3dcver.com

3D视觉交流群成立啦,微信:cv3d001