减振的重量分配为空重的3%,与低桨毂力矩旋翼(扑翼叶片)的使用一致。
这些设计包括相当于飞机空重5%。该系数基于使用NDARC重量模型估计总标量飞机重量的5%误差。
NDARC参数化重量模型用于机身、飞行控制、起落架、旋翼桨毂和叶片、齿轮箱、传动轴、机翼和螺旋桨。通过比较特定飞机的实际重量和估计重量来校准参数模型。在没有经过认证的生产AAM/UAM飞机重量声明的情况下,重量数据库中的小型飞机用于校准。当小型直升机没有可用信息时,较大的旋翼机(UH-60A、UH-60M、RAH-66.V-22)也包括在校准范围内。倾转旋翼机的校准基于XV-15(尽管它不是生产设计)和V-22(尽管它不小)。下表给出了当前设计中使用的校准系数。基准校准基于几架飞机的平均值;设计偏差将包括高校准(平均值+标准偏差)和低校准(平均标准偏差)。表还给出了技术因素,包括设计方法和先进材料的影响。NDARC输入技术因素(参数TECH_xxx)是下表中校准和技术因素的乘积。


重量方程分别对非增压控制(不虑气动面或旋翼载荷)、增压机构(执行器)和增压控制(受气动面和旋翼载荷影响)进行建模;负载路径从飞行员、控制台控制、非增压控制、增压机构、增压控制,最后到达部件。参数方程是根据液压执行器的重量数据开发的。假设增压机构和液压重量的总和(以及技术因素的合理值)也是电动执行系统重量的合理估计。

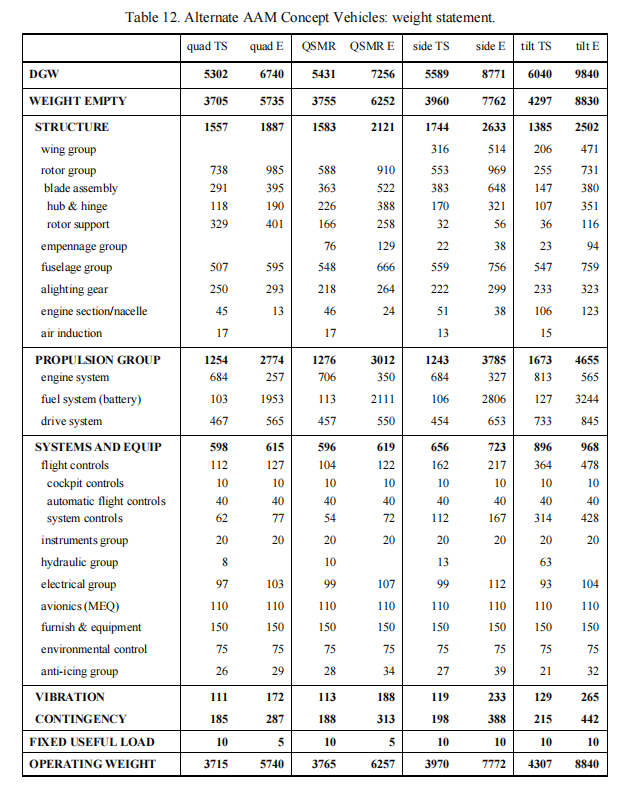
系统和设备组重量的分配取决于当前的直升机。下表给出了权重。还显示了这些权重中包含的技术因素,总重量为480磅。
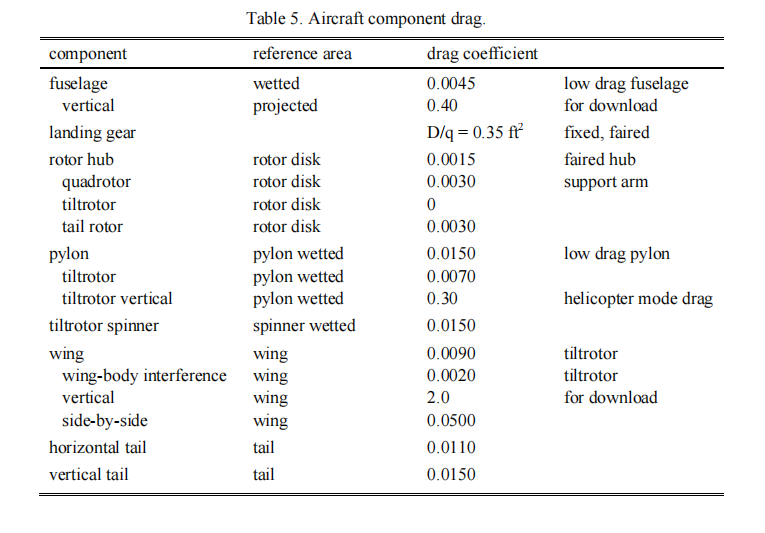

下图显示了基准飞机的阻力累积。旋翼桨毂和支架贡献了大部分阻力。旋翼桨毂、旋翼支撑和机翼阻力与飞机尺寸成正比,因此电动飞机的阻力更高。

设计叶片载荷为
,根据失速裕度选择,以获得良好的前飞机动能力。该叶片载荷的参考大气是起飞条件,6000英尺高度ISA,旋翼叶尖端速度为450英尺/秒,噪音低。所有旋翼(倾转旋翼除外)的叶片翼型均为VR12内侧和SSCA09外侧,过渡超过85-95%R。VR12翼型具有良好的失速特性,与设计叶片载荷选择一致。当前设计的低叶尖速度不需要尖端的薄翼型,但在最初的开发中使用了薄翼型,以检查叶尖速度的影响。翼型面板是专门为支持这些概念飞机设计而建造的。
针对倾转旋翼,设计叶片载荷为:

高于其他配置,因为飞机处于高速前进飞行的飞行模式,巡航尖端速度为225英尺/秒,悬停的50%用于高效运行。叶片翼型为NACA-64系列截面,从根部到尖端的厚度t/c=28/18/12/8%(XV-15翼型;分别用于径向站r/R=0.2、0.55、0.8、0.95)。失速延迟模型用于悬停和边缘飞行性能。
通过研究设计叶片载荷和旋翼Profile Power 对概念飞行器的影响,可以评估进一步优化翼型的潜在收益,飞机配平方案通过调整飞机控制装置(总距、横向周期、纵向周期和踏板,根据旋翼飞行器类型连接到旋翼和固定翼控制装置)和飞机姿态(俯仰角),在飞机上获得零净力和力矩。对于对称飞机配平,只能使用纵向载荷和控制装置。
四旋翼具有总距控制、交叉轴系和挥舞旋翼。旋翼速度控制被视为一种偏移(固定的总桨距值基于总控制和设计叶尖速度的悬停性能)。四旋翼桨毂位于横向和纵向位置±1.35R(35%间距,臂长1.91R)。后旋翼比前旋翼高0.35R,以提高性能和噪音水平(减少旋翼/旋翼干扰)。重心向前0.8英尺(相对于旋翼之间的中点),以进一步提高前飞配平的性能。旋翼有5个叶片。挥舞频率为1.03/rev(4%R等效铰链偏移),用于低桨毂力矩,从而降低旋翼重量。铰链和俯仰轴采用俯仰襟翼联轴器

布置,这使得在向前飞行时相对于轴的摆动减少了约30%。支撑臂的重量为7.5 Ib/ft(这一估计给出了实际重量的合理比例)。优化后的叶片几何尺寸具有14度线性扭度和0.95线性锥度比。
QSMR具有传统的直升机控制,带有铰接叶片(挥舞滞后俯仰运动)。原始设计使用NOTAR抗扭矩系统;本研究的基准设计具有低叶尖速度的尾旋翼。主旋翼有6个叶片,叶尖下垂(20度)和锥形(60%),转速为0.94R,以降低噪音。挥舞频率为1.035/rev(相当于铰链偏移量的4.5%)。优化的叶片几何形状具有-14度线性扭曲。尾旋翼设计约束为7lb/ft²的桨盘载荷、Cw/o=0.12和450ft/sec的叶尖速度有6个叶片,83=45度。
横列双旋翼具有总距和纵向周期旋翼控制,带有铰接叶片(挥舞滞后俯仰运动)。旋翼重叠15%(跨度=旋翼直径的85%),以获得最佳巡航性能,旋翼使外侧叶片向前旋转。旋翼有4个叶片,叶尖扫掠(15度)和锥度(60%)为0.94R。并在0.94R时逐渐变细(60%)。挥舞频率为1.035/rev(相当于铰链偏移量的4.5%)。旋翼支撑(机翼)是一种非升降、光滑的结构;根据起飞要求和扭转刚度约束,估算倾转旋翼机机翼的结构重量。优化的叶片几何形状具有-16度线性扭度。
倾转旋翼机具有用于直升机模式飞行的总距和纵向周期变距控制,以及用于飞机模式飞行的固定翼控制,具有无铰链旋翼。旋翼有6个叶片。挥舞频率为1.07/rev(用于估算叶片重量)。优化后的叶片几何形状具有-29度的线性扭度(在50%悬停尖端速度下巡航时不需要非线性扭度)和0.95的线性锥度比。设计机翼载荷为60 lbft²,机翼跨度由机身宽度、旋翼半径(旋翼桨毂位于翼尖)和旋翼机身间隙0.60 ft获得。
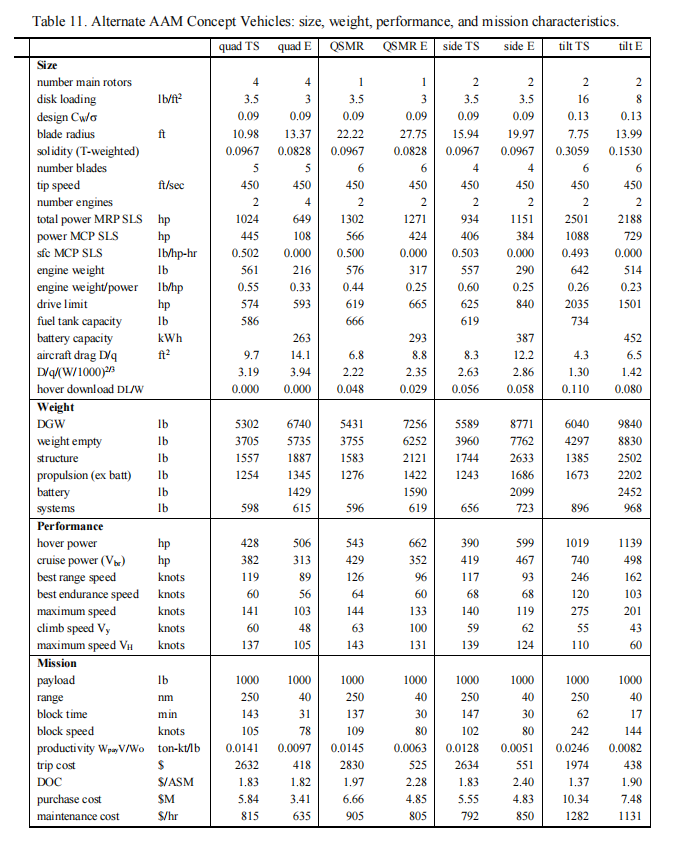
功率P(MRP)以马力为单位,重量以磅为单位。下表给出了性能特征,包括IRP(30分钟)和MRP(10分钟)额定功率值与发动机设计功率(MRP)的比例。机械极限实际上是在规格速度15000 rpm下的扭矩极限。燃油消耗率随着功率的增加而降低。在设计尺寸(660马力MRP)下,发动机重量为288磅(0.44磅/马力)。

传输损耗为2%。由于发动机性能下降,燃油流量增加了5%。附件损失为20马力。发动机静音要求每台发动机25磅。
W=0.5382Q0.8129+0.1P
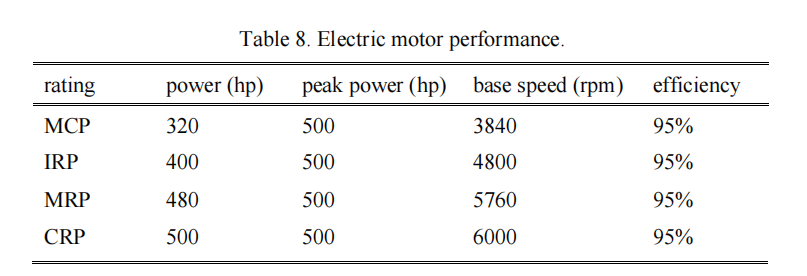
对于以磅为单位的重量,峰值扭矩Q(ft-lb)和功率P(hp)。该回归方程基于64台电机,功率为20-550hp,转速为100-10000rpm,高扭矩重量比电机的平均误差为25%。第二项是电子速度控制系统的重量。热管理系统有一个单独的模型。下表给出了性能特征,包括IRP(30分钟)和MRP(10分钟)额定值。功率值与发动机设计功率(MRP)成比例。峰值功率实际上是在规格速度6000 rpm时的扭矩限制。基本速度是功率限制和扭矩限制相交的地方。假设电机效率恒定在95%,与地形和速度无关。更完整的发动机性能模型将使用效率图,但用于悬停和巡航的恒定效率可以捕捉到对飞机尺寸的影响。
接线重量为0.62磅/英尺,接线长度根据电机和蓄电池之间的距离计算。
对于转速受控的旋翼,需要25%的扭矩裕度才能在阵风和机动中对控制做出良好响应。该裕度是通过在所有设计任务段和飞行条件下将可用功率限制在75%(而不是95%)来实现的。
Molicel INR-21700-P45B锂离子电池的比能量为242 Whkg,能量密度为643 WhL。最大脉冲放电电流为10C。在80%可用能量的情况下,电池比能量为194 Whkg。假设电池管理系统为50%,则安装的可用比能为129 Whkg。

采用电推进的基准设计使用了400Whkg的安装可用电池比能。电池比能量(未安装)为650Whkg;520 Whkg的可用能量为80%,假设电池管理系统为30%,安装的可用比能量为400 Whkg。
热管理系统模型给出了功率、质量流量和推力与排热的函数关系。系统重量取决于设计排出的热量。对于基准飞机,设计散热量为电池功率容量的2%和电机功率的5%。
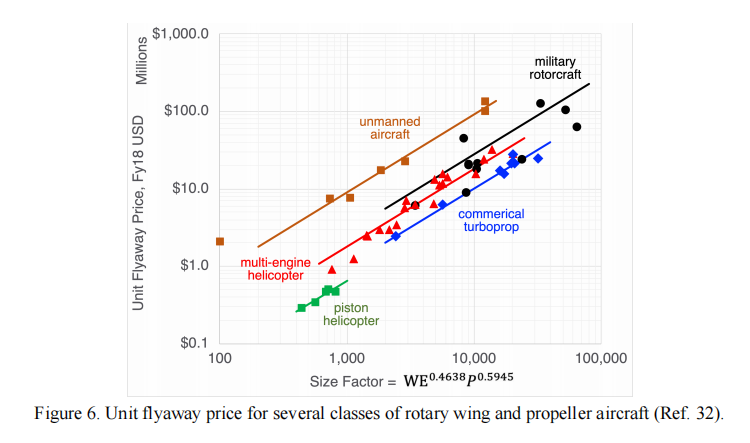
Harris和Scully开发了一种估算旋翼飞机购买价格的方法,Scott对其进行了修订和扩展。该方法给出了20%以内的价格,因为价格=K(SF),尺寸系数SF=WE04638 p0.5945。这里WE是空载重量,P是装机功率;因子K取决于飞机类型和一些复杂性度量。方程式Price=K(SF)适用于直升机、倾转旋翼机、通用航空和民航飞机,以及商用涡轮螺旋桨飞机和无人驾驶飞机。尺寸因子SF显示为飞机成本的通用缩放参数。美国国家航空航天局的概念飞行器的SF=1500至6000,这意味着根据下图中的数据,单位飞行成本在300万至1000万美元之间。然而,当采用高速制造并生产更多的UAM整机时,UAM行业预计价格将比现有的旋翼机和涡轮螺旋桨飞机低一个数量级。目前还没有数据来评估适用于UAM飞机的系数K,但使用这个尺寸系数来估算概念机的相对成本是合理的。
根据2024年的数据,运营成本是使用喷气式飞机A每加仑2.31美元的燃料价格和每千瓦时0.0400美元的电力价格计算的。电池成本为每千瓦时50美元,相当于未来十年内的电池购买量。排放交易计划的成本为每千克二氧化碳0.065美元。对于电推进,功率在尺寸系数上降低了0.5倍。任务设备和飞行控制电子设备的成本为每磅5000美元。