点击下方卡片,关注「3D视觉工坊」公众号
选择星标,干货第一时间送达
3D视觉工坊很荣幸邀请到了北京通用人工智能研究院(BIGAI)-上海科技大学在读博士林沛,为大家着重分享他们团队的工作。如果您有相关工作需要分享,欢迎文末联系我们。
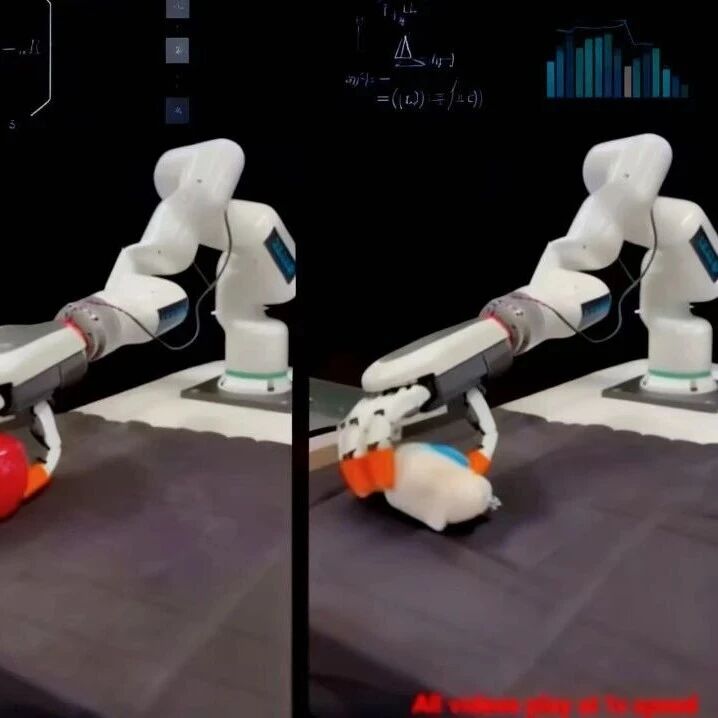
 PP-Tac: Paper Picking Using Tactile Feedback in Dexterous Robotic Hands
PP-Tac: Paper Picking Using Tactile Feedback in Dexterous Robotic Hands
主页:https://peilin-666.github.io/projects/PP-Tac/
直播信息
时间
2025年09月11日(周四)19:00
主题
RSS'2025开源|首个完全开源的全向视触觉传感器!灵巧手轻松实现纸类物体的抓取!
直播平台
3D视觉工坊视频号
点击按钮预约直播
3D视觉工坊哔哩哔哩也将同步直播
主讲嘉宾
 林沛
林沛
北京通用人工智能研究院(BIGAI)-上海科技大学在读博士
现北京通用人工智能研究院(BIGAI)-上海科技大学在读博士,研究方向为带触觉灵巧手的精细操作,曾在RSS,IROS,AAAI,CVPR等会议上发表多篇论文,师从焦子元和肖晨曦老师。
个人主页:https://peilin-666.github.io/
直播大纲
纸类物体抓取及这一类contact rich任务的问题介绍 目前视触觉传感器和平行夹爪的局限性 首个完全开源的全向视触觉传感器介绍 通过轨迹优化的灵巧手数据合成方法 触觉灵巧手policy的构建和学习
参与方式

注:3D视觉工坊很荣幸邀请到了北京通用人工智能研究院(BIGAI)-上海科技大学在读博士林沛,为大家着重分享他们团队的工作。如果您有相关工作需要分享,
欢迎联系微信:cv3d009,请备注:宣传工作,则不予通过。