2025具身智能「封神榜」
作为机器人领域的顶级期刊之一,Science Robotics 不仅汇聚了全球最前沿的研究成果,也常常通过其封面论文展示出未来发展的趋势——
从人机融合到仿生设计,从精准医疗到智慧农业,从多机器人协同到外星探测……
这些研究早已跳出 “机械执行” 的传统框架。
封面文章里所展现的研究,正好为我们提供了一个窗口,让我们看到具身智能如何在不同维度落地。
今天,我们就逐一拆解这些封面成果,看清具身智能从实验室走向产业的真实路径。

9篇封面论文盘点
标题:Surmounting the ceiling effect of motor expertise by novel sensory experience with a hand exoskeleton
发文机构:Sony Computer Science Laboratories Inc.(索尼计算机科学实验室,东京,日本),NeuroPiano Institute(京都,日本)

▲图1|2025年1月Science Robotics封面
内容概览:很多运动员和音乐家在练习多年后,都会遇到一个瓶颈:无论怎么练习,技能似乎都难以再突破,这就是所谓的“天花板效应”。
这篇 Science Robotics 封面文章提出了一个新思路——利用手部外骨骼机器人来打破这个极限。
研究团队让专业钢琴家被动体验到一种他们自己无法完成的动作:手指快速而复杂的独立运动。外骨骼能以比钢琴家最快速度更快的节奏移动手指,从而带来一种全新的“感官体验”。
结果发现,虽然钢琴家在常规训练中速度早已停滞不前,但在这种机器人“辅助体验”后,他们的演奏速度显著提升。

更有趣的是,这种训练不仅仅对“受训的那只手”有效,另一只没有训练的手也出现了进步,显示出跨手的学习转移效应。而且,这种改变不是来自肌肉或手部结构本身的差异,而是源于大脑运动皮层中指尖动作的神经协调模式被重新塑造。
换句话说,这项研究证明:通过感官层面的全新运动体验,可以突破人类技能学习的极限。
标题:Biohybrid hand actuated by multiple human muscle tissues
发文机构:东京大学(Department of Mechano-Informatics, Graduate School of Information Science and Technology, University of Tokyo, Tokyo, Japan)

▲图2|2025年2月Science Robotics封面
内容概览:近年来,科学家们一直在探索用活体肌肉组织来驱动机器人,打造“生物混合机器人”。这些机器人能够模仿自然界的动作,但往往只停留在小尺度、单一运动的阶段,灵活性和可控性有限。
这篇封面文章展示了一个突破性的成果:研究团队打造了一只由多块肌肉组织驱动的仿生手。
核心部件是论文提出的多肌肉组织驱动器(MuMuTA)——由多束细长的肌肉纤维组成。每个驱动器能产生约 8 毫牛顿的收缩力 和 4 毫米的收缩长度,并通过类似“拉索传动”的机制转化为手指的弯曲运动。

借助这种设计,研究人员成功实现了手指的独立控制,让仿生手可以做出多样化的动作,而不仅仅是简单的单关节运动。这意味着,活体肌肉组织已经从“实验玩具”迈向能够驱动复杂机械结构的关键阶段。
这一成果不仅展现了 MuMuTA 作为未来生物混合机器人动力源的潜力,也为更接近自然手功能的人工器官和柔性机器人提供了新的可能。
标题:Social robots as conversational catalysts: Enhancing long-term human-human interaction at home
发文机构:麻省理工学院(Personal Robots Group, Media Lab, Massachusetts Institute of Technology, Cambridge, MA, USA)

▲图3|2025年3月Science Robotics封面
内容概览:当社交机器人走进家庭,它们到底会如何改变家人之间的关系?
这篇 Science Robotics 封面文章提出了一个新视角:与其让机器人直接“教育孩子”,不如让它们帮助父母和孩子开展更高质量的交流。
研究团队邀请了 70多个亲子家庭,在 1 到 2 个月的时间里,让他们与不同类型的机器人共同参与“亲子共读”活动。机器人被设计成三种角色:
(1)被动倾听者(只在场陪伴);
(2)固定策略的主动参与者(始终以相同方式插话或互动);
(3)会切换策略的主动参与者(根据情境调整互动方式)。
结果发现,机器人越积极参与,亲子之间的对话质量越高。不过,不同家庭的收益有所差异:
对非英语母语的家庭,策略灵活切换的机器人帮助更大;
对母语家庭,固定策略反而更有效。
这项研究提醒我们:社交机器人并不仅仅是“陪孩子”的玩具,它们更可以成为支持父母、促进家庭对话的工具。未来,这种设计将为不同文化和语言背景的家庭带来更加公平与个性化的陪伴体验。
标题:Sticking the landing: Insect-inspired strategies for safely landing flapping-wing aerial microrobots
发文机构:哈佛大学(Harvard John A. Paulson School of Engineering and Applied Sciences, USA)
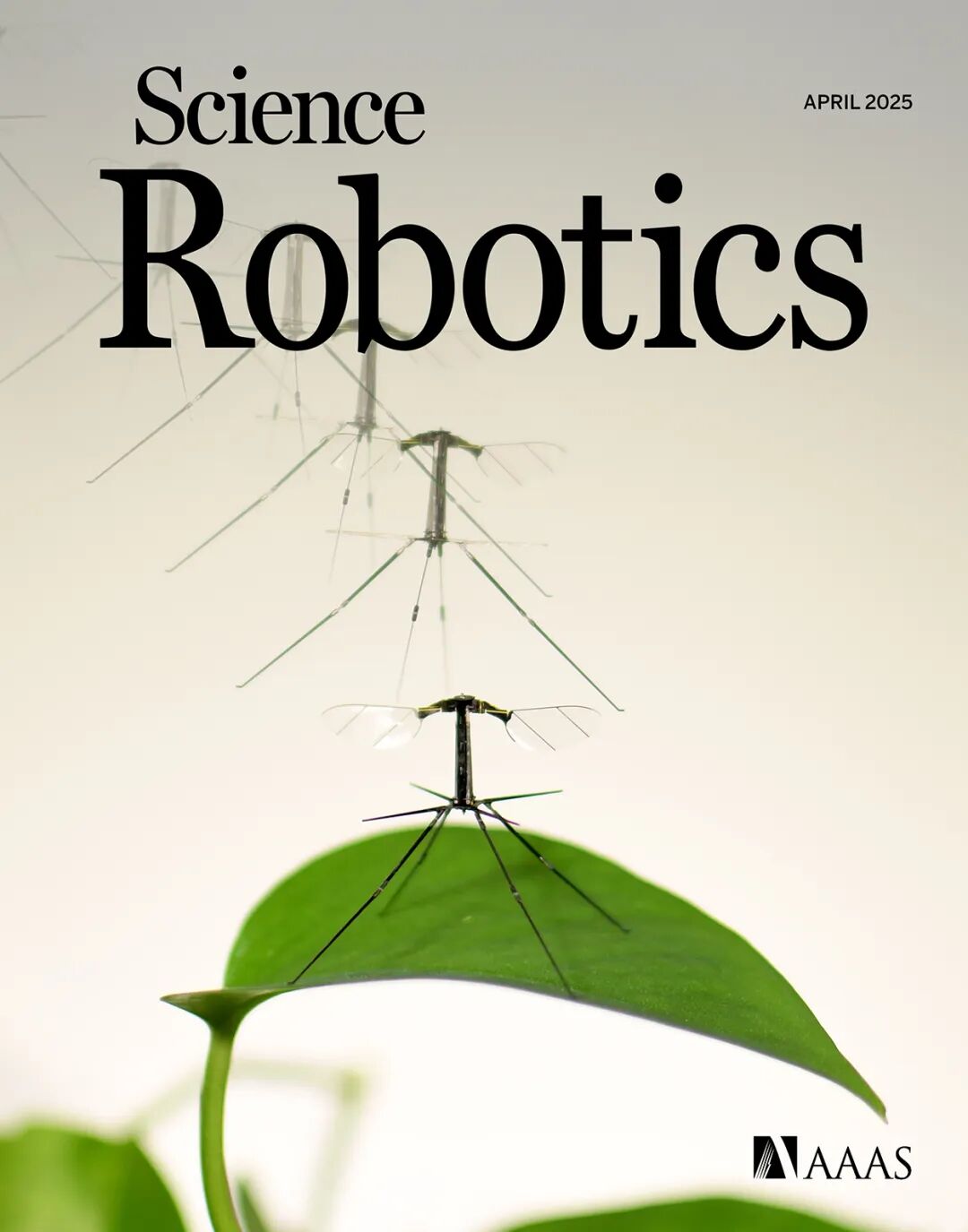
▲图4|2025年4月Science Robotics封面
内容概览:对飞行昆虫来说,从空中平稳着陆到地面并不简单。它们需要在不同表面上完成稳定的“收尾动作”,有的昆虫选择控制飞行轨迹精准落地,有的则依靠身体部位缓冲冲击。
受此启发,哈佛大学的研究团队在微型扑翼飞行器(RoboBee) 上,提出了一套机械设计和控制方法相结合的仿生落地策略。
在机械设计上,研究者借鉴了大蚊(crane fly)的腿部结构,设计出能量耗散性强的柔性腿(compliant legs)。他们测试了三种关键因素:腿的支撑姿态、关节数量,以及关节位置,从而优化了缓冲能力。
在控制方法上,研究团队解决了接近地面时的“气动地面效应”难题,设计了一种分阶段的着陆动作:先加速下冲,再减速接近,最后以一个非零速度触地,就像昆虫的典型落地轨迹一样。

结合柔性腿的缓冲,这一动作大大提高了着陆的稳定性和成功率。
最终,团队在昆虫尺度的扑翼微型机器人上验证了方案,证明它能够在自然地形上实现安全而精准的着陆。
这项成果不仅拓展了微型飞行机器人的能力边界,也让它们更接近昆虫般的真实生存技能,为未来在复杂环境下的微型无人机应用提供了关键基础。
标题:Embodying soft robots with octopus-inspired hierarchical suction intelligence
发文机构:英国布里斯托大学(School of Engineering Mathematics and Technology, University of Bristol, UK);布里斯托机器人实验室(Bristol Robotics Laboratory, UK)

▲图5|2025年5月Science Robotics封面
内容概览:章鱼为什么能做到那么灵巧?
答案在于它独特的分层式神经肌肉系统:触手上的吸盘不仅能抓取,还能“思考”,在局部完成大量感知与控制,让大脑只需处理少量的高层信息。
这篇 Science Robotics 封面文章正是受到章鱼的启发,开发了一种 “吸附智能”,把吸盘的工作原理转化到软体机器人中,形成低层局部控制与高层感知决策的层级结构。
在低层智能上,通过将吸附流体与软体回路耦合,机器人能实现类似章鱼的灵巧动作:轻柔抓取易碎物体、顺应性弯曲、包裹未知形状的目标。
在高层感知上,通过解码吸盘的压力反馈,机器人能够识别接触、判断环境介质和表面粗糙度,甚至预测拉扯力。
这种“吸附智能”大部分计算在局部完成,仅有少量信息传递给“中枢大脑”,从而减少计算负担,提升柔性机器人的灵活性。
研究成果不仅为低成本、易集成的仿生智能提供了新路径,还能广泛应用于工业搬运、自动化制造、农业采收,甚至医疗操作等场景。
标题:In situ foliar augmentation of multiple species for optical phenotyping and bioengineering using soft robotics
发文机构:美国康奈尔大学(Sibley School of Aerospace and Mechanical Engineering, Cornell University, Ithaca, NY, USA)

▲图6|2025年6月Science Robotics封面
内容概览:精准农业的目标,是在提高作物产量的同时减少农药和化肥的使用。但现实中存在两大难题:
(1)传感器检测能力有限,往往只能依赖植物的外观;
(2)许多“看不见”的测量方法(比如测水势的 Scholander 压力弹)不仅费力,还具有破坏性。
这篇 Science Robotics 封面文章研发了一种软体机器人叶片夹持器,结合“压印注射”技术,可以把纳米级的合成与生物探针精准、安全地注入植物叶片,从而实现非破坏性的原位检测与生物工程。
结果显示,这种夹持器能显著提升注射效果:
注射成功率超过 91%;
渗透面积比传统无针注射方法提升 12 倍;
叶片损伤极小。

这种方法不仅能长时间保持植物的正常生理功能,还能进行跨物种应用,为作物表型分析、环境响应监测和基因工程验证提供了新手段。
标题:SRT-H: A hierarchical framework for autonomous surgery via language-conditioned imitation learning
发文机构:美国约翰斯·霍普金斯大学(Laboratory for Computational Sensing and Robotics, Johns Hopkins University, Baltimore, MD, USA)

▲图7|2025年7月Science Robotics封面
内容概览:外科手术机器人的自主化一直是医学机器人领域的重大挑战。过去的研究大多集中在简单操作的自动化,但真正的临床应用需要机器人能在复杂的人体组织环境下,进行长时间、灵巧且稳定的操作。
这篇封面文章提出了一种 层级式框架(SRT-H),结合了语言引导的模仿学习:
高层策略:以语言为规划空间,生成任务步骤或纠正指令,指导机器人完成长时间的操作,并帮助从低层错误中恢复;
低层策略:根据高层指令生成具体的运动轨迹,执行精细动作。
研究团队在离体胆囊切除术(一种常见的微创手术)中进行了验证。结果显示,该方法在 8 个不同的胆囊实验中实现了 100% 的成功率,并且完全由机器人自主完成,无需人工干预。
更重要的是,层级式框架大幅提升了机器人在动态、复杂环境中从“次优状态”中恢复的能力,迈出了外科自主化从“单步骤”走向“手术级别自主”的重要一步。
这项成果不仅证明了语言驱动的层级控制在医疗中的可行性,也标志着自动化手术系统距离临床部署又近了一步。
标题:Cooperative robotic exploration of a planetary skylight surface and lava cave
发文机构:德国人工智能研究中心(DFKI)机器人创新中心,德国不莱梅大学 数学与计算机科学学院

▲图8|2025年8月Science Robotics封面
内容概览:在月球或火星的表面,存在大量由火山活动形成的熔岩洞穴。这些洞穴入口往往陡峭且危险,传统方式难以进入。最安全且高效的方法,就是让多机器人团队合作探索。
这篇 Science Robotics 封面文章提出了一套完整的行星熔岩洞穴探测任务方案。研究团队设计了一个由 3 台异构机器人组成的探索小队,按照四个阶段完成任务:
(1)对洞穴天窗和周边进行建模;
(2)部署一台“侦查机器人”利用绳索下降进入洞口;
(3)进入洞穴内部进行三维扫描;
(4)多机器人协同构建洞穴的外部与内部形态模型。
这一成果不仅证明了多机器人合作在行星级极端环境探索中的潜力,也为未来的月球与火星基地勘探提供了技术蓝图。
标题:RoboBallet: Planning for multirobot reaching with graph neural networks and reinforcement learning
发文机构:Google DeepMind,伦敦大学学院(University College London, UK)

▲图9|2025年9月Science Robotics封面
内容概览:在现代制造业中,多机器人协作是核心需求:多个机械臂需要在充满障碍的共享空间内,同时完成几十个不同的操作任务。
这篇封面文章提出了一个全新的解决方案:结合图神经网络(GNN)与强化学习(RL)的自动化多机器人规划框架。
研究团队让系统在大量随机生成的仿真环境中训练,场景包含不同的障碍布局、机器人分布和任务组合。通过图表示与图策略网络,机器人能够在一个共享空间内同时解决任务分配、调度和运动规划三大难题。

在实验中,该方法在一个复杂环境里同时调度 8 台机器人完成 40 个目标任务,并能零样本泛化到从未见过的新场景(包括新的障碍几何、机器人位置和任务分布)。得益于规划速度快,该框架还能应用于生产单元布局优化、容错规划以及基于感知的在线重规划。
这种方法把原本“手工编舞”的过程,变成了真正的“机器人芭蕾”——多台机器人在复杂环境下协同完成动作,快速而优雅。

总结
从我们盘点的 9 篇 Science Robotics 封面文章可以看出一个清晰的趋势:
突破人类边界:手部外骨骼帮助钢琴家突破技能瓶颈,外科手术机器人在语言驱动下实现长时自主操作。
向生物学习:仿生肌肉驱动的机械手、章鱼吸盘式的层级智能、昆虫启发的扑翼飞行器着陆策略,都体现了“向自然借智慧”的路径。
走进真实场景:社交机器人促进家庭沟通,软体机器人在农业中实现叶片注射检测,展示了机器人逐步融入日常与生产。
多智能体协作:从行星熔岩洞穴探索到 RoboBallet 的多机器人协同规划,体现出机器人系统向更大规模、更复杂任务的方向演进。
这些研究背后共同的关键词,正是具身智能。无论是增强人类的身体机能,还是赋予机器人类生物的感知与控制,抑或是让多机器人群体具备协同探索的能力,核心都在于——智能必须扎根于身体,融入环境,才能展现真正的智慧。
可以说,这些封面文章不仅是机器人学的里程碑工作,也是具身智能发展的生动注脚。
编辑|阿豹
审编|具身君
工作投稿|商务合作|转载
:SL13126828869(微信号)
>>>现在成为星友,特享99元/年<<<


【具身宝典】||||
【技术深度】|||||||
【先锋观点】|||
【非开源代码复现】||
我们开设此账号,想要向各位对【具身智能】感兴趣的人传递最前沿最权威的知识讯息外,也想和大家一起见证它到底是泡沫还是又一场热浪?
欢迎关注【深蓝具身智能】👇

【深蓝具身智能】的内容均由作者团队倾注个人心血制作而成,希望各位遵守原创规则珍惜作者们的劳动成果。
投稿|商务合作|转载:SL13126828869(微信)

点击❤收藏并推荐本文